一种应用于柔性驱动机器人的绳索的传动特性测试方法与流程
本发明涉及绳索传动系统领域,特别涉及一种应用于柔性驱动机器人的绳索的传动特性测试方法。
背景技术:
1、为了实现狭窄空间的运动传递,绳索传动系统在机器人设计领域是一个重要的研究方向。在没有引入额外复杂机构的情况下,它允许驱动机构和末端执行器的分离;因此不需要在机构末端安装大功率电机或驱动器来操作执行器,从而实现轻便小巧的末端执行器的设计。而且,绳索具有柔软和弯曲特性,它能够通过狭窄甚至弯曲的路径来实现远距离的大功率传动。因此,在很多受空间限制的应用场合,绳索常被用来当作驱动机构,例如仿生机械手、可穿戴外骨骼及康复机器人等。最近,绳索传动也被应用在搜救检测机器人、微创手术及无创手术机器人等装置上。
2、索传动系统的控制却是一个关键性的难题。由于绳索具有延展性,绳索伸长量的存在将会导致套索传动机构产生位置误差和运动间隙。同时由于绳索与套管之间存在摩擦力等,套索传动机构常常会遇到张力衰减等问题。这些问题阻碍了套索系统应用在一些需要精密控制的场合。虽然在某些场合,如可穿戴外骨骼等,可通过在末端执行器上安装相应的传感器及通过相应的控制算法来实现套索传动系统的精密控制,但是在一些特定的应用场合,如内窥镜手术机器人等,由于受内部空间的尺寸限制等,末端执行器上没有额外的空间安装相应的传感器。虽然可通过定制微型传感器来达到精确控制的目的,但是加工制造成本较高。同时由于末端执行器需要进入人体内部操作,传感器的安装也会带来生物相容性、消毒安全等问题。因此,在这些应用场合,通常缺少末端相应的传感信息反馈,只能应用开环控制。但是,在这些应用场合,如手术机器人中,套索传动机构由于运动间隙等产生的位置误差需要医生不断调整输入命令,不可避免地,这将会降低系统的直观性,继而影响医生的操作:但更重要的是,因为医生不会跟末端执行器直接接触,力反馈的缺少将会影响手术的安全性。
3、针对上述存在的这些问题,通过对绳索的传动特性进行测试,以根据绳索的性能进行力和位移的补偿将能有助于提高基于绳索的传动系统的控制性能,但现在缺少针对绳索的传动特性进行测试的有效方案。
技术实现思路
1、本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种应用于柔性驱动机器人的绳索的传动特性测试方法。
2、为解决上述技术问题,本发明采用的技术方案是:一种应用于柔性驱动机器人的绳索的传动特性测试方法,包括以下步骤:
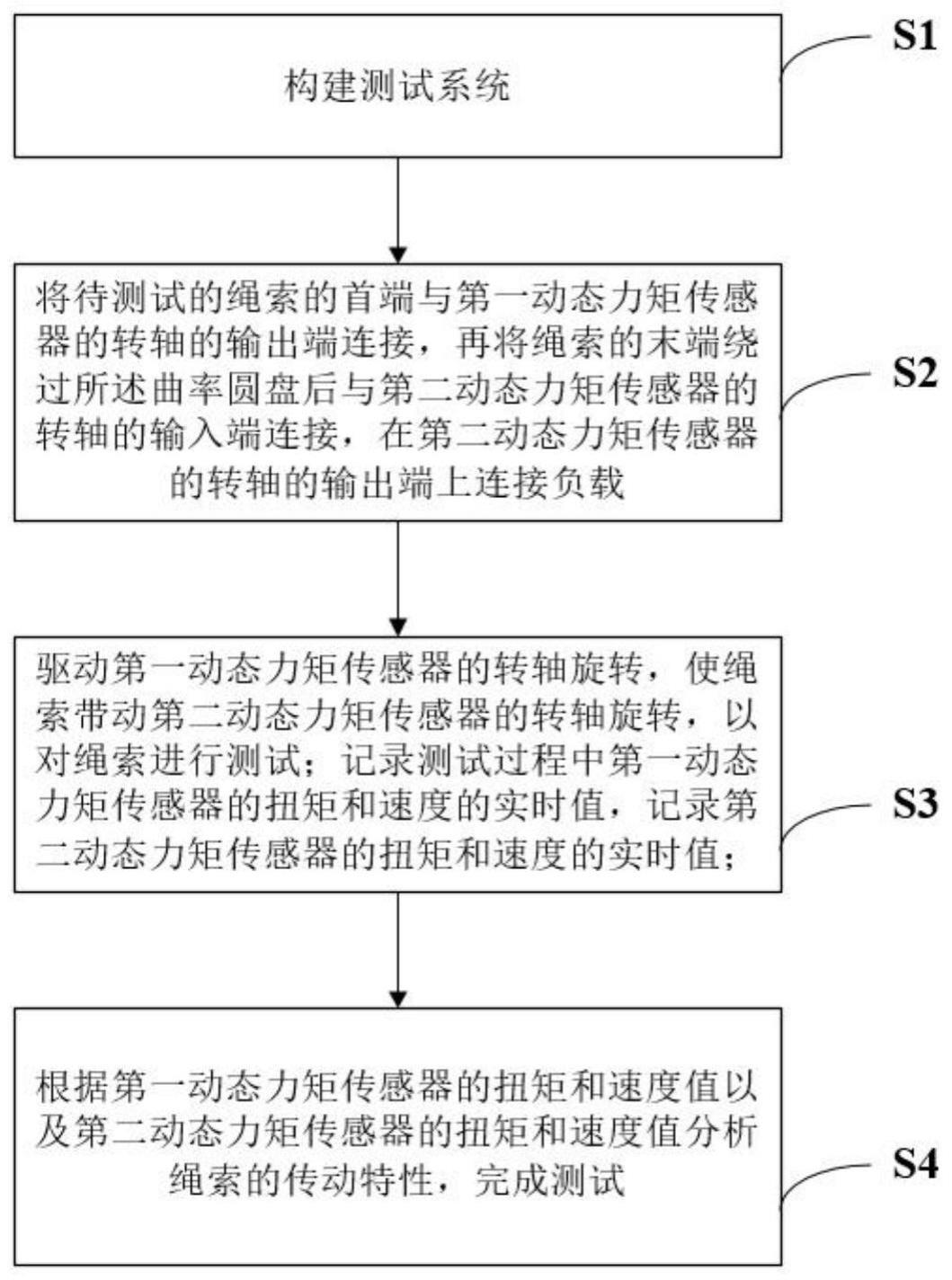
3、s1、构建测试系统:所述系统包括第一动态力矩传感器、曲率圆盘以及第二动态力矩传感器;
4、s2、将待测试的绳索的首端与所述第一动态力矩传感器的转轴的输出端连接,再将绳索的末端绕过所述曲率圆盘后与所述第二动态力矩传感器的转轴的输入端连接,在所述第二动态力矩传感器的转轴的输出端上连接负载;
5、s3、驱动所述第一动态力矩传感器的转轴旋转,使绳索带动所述第二动态力矩传感器的转轴旋转,以对绳索进行测试;记录测试过程中所述第一动态力矩传感器的扭矩和速度的实时值,记录所述第二动态力矩传感器的扭矩和速度的实时值;
6、s4、根据所述第一动态力矩传感器的扭矩和速度值以及所述第二动态力矩传感器的扭矩和速度值分析绳索的传动特性,完成测试。
7、优选的是,所述步骤s3具体为:
8、驱动所述第一动态力矩传感器的转轴以转速r进行旋转,使绳索带动所述第二动态力矩传感器的转轴旋转,以对绳索进行测试;
9、记录测试过程中:
10、t1时间时,所述第一动态力矩传感器的扭矩w1和速度v1,所述第二动态力矩传感器的扭矩w2和速度v2;
11、t2时间时,所述第一动态力矩传感器的扭矩w1′和速度v1′,所述第二动态力矩传感器的扭矩w2′和速度v2′。
12、优选的是,所述步骤s4具体为:
13、计算t1至t2时间内,绳索首端和尾端的位移差δs、位移补偿系数ηs:
14、
15、
16、其中,l为绳索的长度,m为负载的质量;
17、计算t1至t2时间内,绳索首端和尾端的扭矩差δw、扭矩补偿系数ηw:
18、
19、
20、将位移补偿系数ηs和扭矩补偿系数ηw作为绳索的传动特性表征参数。
21、优选的是,更换不同半径的曲率圆盘,分别测试不同半径的曲率圆盘时绳索的传动特性表征参数ηs和ηw,取所有ηs的平均值作为绳索最终的位移补偿系数,取所有ηw的平均值作为绳索最终的扭矩补偿系数。
22、优选的是,用于测试的曲率圆盘的半径包括20、25、30、35和40mm。
23、优选的是,转速r为7-14r/min。
24、优选的是,所述步骤s1中构建的测试系统还包括与所述第一动态力矩传感器的转轴的输入端驱动连接的调速电机。
25、优选的是,所述调速电机和第一动态力矩传感器的转轴的输入端之间连接有联轴器。
26、优选的是,所述第二动态力矩传感器的转轴的输出端上设置有负载轮,通过在所述负载轮上设置砝码来对第二动态力矩传感器的转轴的输出端连接负载。
27、优选的是,所述步骤s1中构建的测试系统还包括用于安装曲率圆盘的圆盘支架,曲率圆盘可拆卸设置在圆盘支架上。
28、本发明的有益效果是:
29、本发明提供了一种能够方便实现应用于柔性驱动机器人的绳索的传动特性测试的方法,采用位移补偿系数ηs和扭矩补偿系数ηw对绳索的传动特性进行表征,绳索在柔性驱动机器人中应用时,能够利用位移补偿系数ηs和扭矩补偿系数ηw进行力和位移的补偿,从而可提高柔性驱动机器人的控制性能。
30、本上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
技术特征:
1.一种应用于柔性驱动机器人的绳索的传动特性测试方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的应用于柔性驱动机器人的绳索的传动特性测试方法,其特征在于,所述步骤s3具体为:
3.根据权利要求2所述的应用于柔性驱动机器人的绳索的传动特性测试方法,其特征在于,所述步骤s4具体为:
4.根据权利要求3所述的应用于柔性驱动机器人的绳索的传动特性测试方法,其特征在于,更换不同半径的曲率圆盘,分别测试不同半径的曲率圆盘时绳索的传动特性表征参数ηs和ηw,取所有ηs的平均值作为绳索最终的位移补偿系数,取所有ηw的平均值作为绳索最终的扭矩补偿系数。
5.根据权利要求4所述的应用于柔性驱动机器人的绳索的传动特性测试方法,其特征在于,用于测试的曲率圆盘的半径包括20、25、30、35和40mm。
6.根据权利要求2所述的应用于柔性驱动机器人的绳索的传动特性测试方法,其特征在于,转速r为7-14r/min。
7.根据权利要求1所述的应用于柔性驱动机器人的绳索的传动特性测试方法,其特征在于,所述步骤s1中构建的测试系统还包括与所述第一动态力矩传感器的转轴的输入端驱动连接的调速电机。
8.根据权利要求7所述的应用于柔性驱动机器人的绳索的传动特性测试方法,其特征在于,所述调速电机和第一动态力矩传感器的转轴的输入端之间连接有联轴器。
9.根据权利要求8所述的应用于柔性驱动机器人的绳索的传动特性测试方法,其特征在于,所述第二动态力矩传感器的转轴的输出端上设置有负载轮,通过在所述负载轮上设置砝码来对第二动态力矩传感器的转轴的输出端连接负载。
10.根据权利要求1所述的应用于柔性驱动机器人的绳索的传动特性测试方法,其特征在于,所述步骤s1中构建的测试系统还包括用于安装曲率圆盘的圆盘支架,曲率圆盘可拆卸设置在圆盘支架上。
技术总结
本发明公开了一种应用于柔性驱动机器人的绳索的传动特性测试方法,包括以下步骤:S1、构建测试系统;S2、将待测试的绳索连接在测试系统上;S3、驱动所述第一动态力矩传感器的转轴旋转,使绳索带动所述第二动态力矩传感器的转轴旋转,以对绳索进行测试;记录测试过程中所述第一动态力矩传感器和第二动态力矩传感器的扭矩、速度;S4、根据步骤S3的结果分析绳索的传动特性。本发明提供的方法,采用位移补偿系数ηs和扭矩补偿系数ηw对绳索的传动特性进行表征,绳索在柔性驱动机器人中应用时,能够利用位移补偿系数ηs和扭矩补偿系数ηw进行力和位移的补偿,从而可提高柔性驱动机器人的控制性能。
技术研发人员:郭凯,杨洪波,张举中,卢景新
受保护的技术使用者:中科侎瑞(苏州)康复科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!