基于激光雷达的建图与定位方法、系统及工程车辆与流程
本申请涉及工程车辆领域,具体涉及一种基于激光雷达的建图与定位方法、系统及工程车辆。
背景技术:
1、slam(simultaneous localization and mapping),即同时定位与地图构建,目前被广泛应用于机器人领域。slam算法使得机器人处于陌生环境时,能够通过自身搭载的传感器来感知环境信息并建立环境地图,并完成对自身位姿的计算,从而使无人载具能够在未知环境中移动。
2、lio-sam(lidae odometry and mapping system with scan context-basedadaptive mapping)是一种基于激光雷达的移动机器人同时定位和地图构建算法,它是基于机器人操作系统开发的。相较于其他广泛应用的算法,如loam(lidar odometry andmapping in real-time)等算法,lio-sam使用帧-局部地图取代帧-全局地图和关键帧选取策略,使算法性能得到提升。
3、但是目前将lio-sam算法应用于自动驾驶车辆的同时定位与地图构建技术还存在无法兼容的问题,亟待改善。
技术实现思路
1、有鉴于此,本申请提供了一种基于激光雷达的建图与定位方法、系统及工程车辆,解决或改善了现有技术中将lio-sam算法应用于自动驾驶车辆的同时定位与地图构建技术还无法兼容的技术问题。
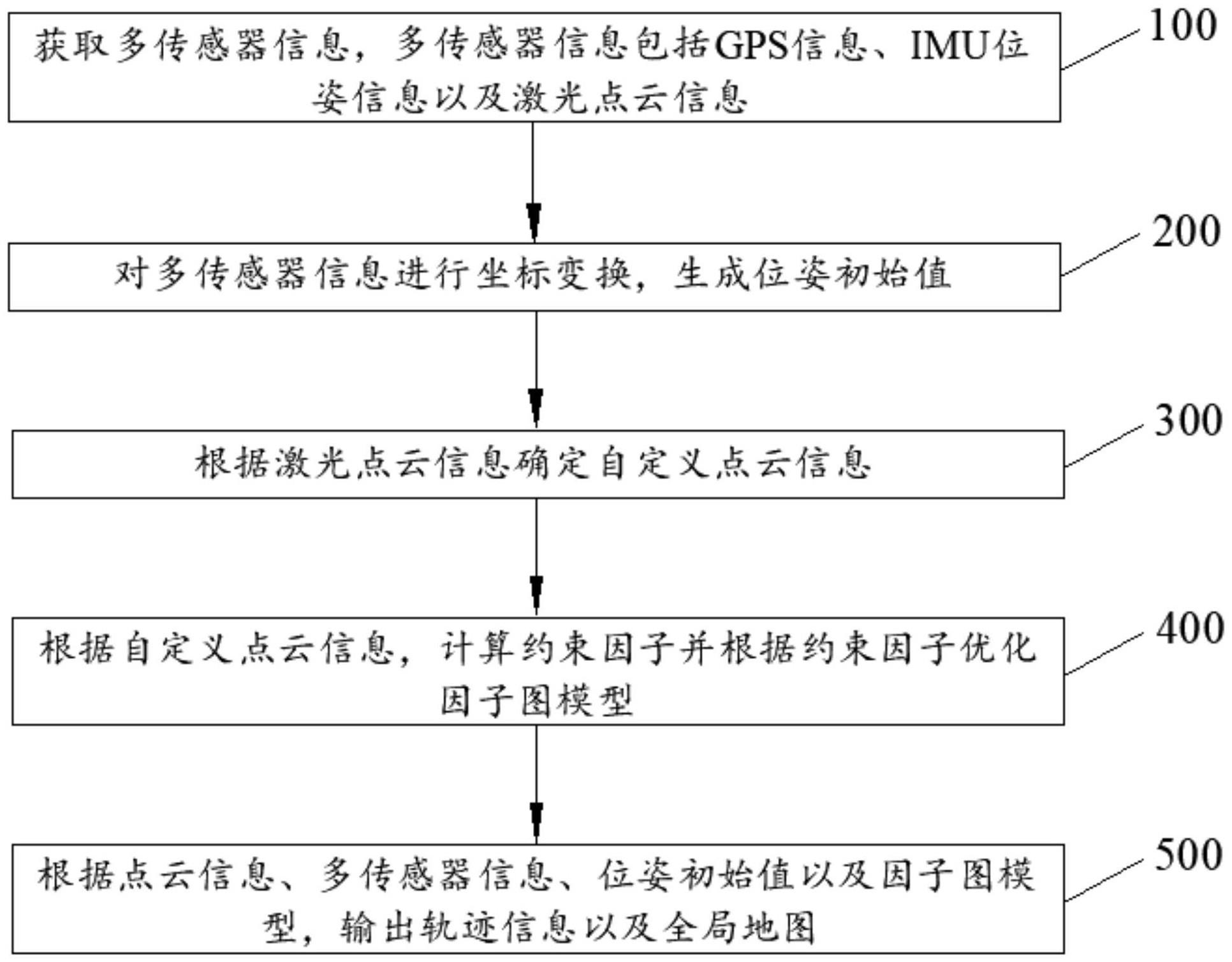
2、根据本申请的第一个方面,本申请提供了一种基于激光雷达的建图与定位方法,此基于激光雷达的建图与定位方法包括:获取多传感器信息,所述多传感器信息包括gps信息、imu位姿信息以及激光点云信息;对所述多传感器信息进行坐标变换,生成位姿初始值;根据所述激光点云信息确定自定义点云信息;根据所述自定义点云信息,计算约束因子并根据所述约束因子优化因子图模型;以及根据所述自定义点云信息、所述多传感器信息、所述位姿初始值以及所述因子图模型,输出轨迹信息以及全局地图。
3、在一种可能的实现方式中,获取imu位姿信息包括:获取初始imu信息;对所述初始imu信息进行预积分,生成imu积分信息,发布惯性里程计;将所述imu积分信息以及激光里程计加入所述因子图模型,得到优化后的因子图模型;由所述优化后的因子图模型,输出优化后的imu位姿信息。
4、在一种可能的实现方式中,所述根据所述激光点云信息确定自定义点云信息,包括:获取激光雷达输出的初始激光点云数据;对所述初始点云数据进行畸变矫正,同时融合所述惯性里程计,生成自定义点云信息;对所述初始激光点云数据进行特征提取,生成特征点云数据;在所述自定义点云信息中添加特征点云数据,生成自定义点云信息。
5、在一种可能的实现方式中,所述根据所述自定义点云信息、所述多传感器信息、所述位姿初始值以及所述因子图模型,输出轨迹信息以及全局地图,包括:对所述位姿初始值进行初始化,获取当前帧激光位姿初始值;获取与所述当前帧激光位姿初始值对应的对应关键帧集合;根据所述对应关键帧集合,构建局部地图;根据所述自定义点云信息、所述多传感器信息,计算所述激光里程计;根据所述因子图模型以及所述激光里程计,优化所述局部地图以及原始全局地图;根据所述优化后的局部地图以及原始全局地图,输出轨迹信息以及全局地图。
6、在一种可能的实现方式中,所述对所述位姿初始值进行初始化,获取当前帧激光位姿初始值,包括:当所述位姿初始值为第一帧位姿时,根据预设姿态角信息对所述位姿初始值进行优化,以获取当前帧激光位姿初始值;或当所述位姿初始值为后续帧位姿时,通过所述惯性里程计获取所述后续帧位姿与相邻帧位姿之间的增量位姿变换,并根据所述相邻帧位姿以及所述增量位姿变换,以获取当前帧激光位姿初始值。
7、在一种可能的实现方式中,在所述根据所述优化后的局部地图以及原始全局地图,输出轨迹信息以及全局地图之后,所述方法还包括:更新历史关键帧的位姿;发布所述激光里程计。
8、在一种可能的实现方式中,所述根据所述自定义点云信息、所述多传感器信息,计算激光里程计,包括:根据所述自定义点云信息以及所述多传感器信息,获取特征点集;对所述特征点集进行优化,生成所述特征点集优化后的位姿;将所述当前帧激光位姿初始值与所述优化后的位姿加权融合,并计算所述激光里程计。
9、在一种可能的实现方式中,所述对所述多传感器信息进行坐标变换,生成位姿初始值包括:根据所述gps信息,获取自定义gps信息;记录所述自定义gps信息的初始坐标值,并将所述自定义gps信息的初始坐标值变换至雷达坐标系,生成所述雷达坐标系下的gps信息;根据所述雷达坐标系下的gps信息,获取姿态角信息;对所述姿态角信息进行初始化,获取位姿初始值。
10、根据本申请的第二个方面,本申请还提供了一种基于激光雷达的建图与定位系统,此基于激光雷达的建图与定位系统包括:信息获取模块,用于获取多传感器信息,所述多传感器信息包括gps信息、imu位姿信息以及激光点云信息;位姿初始值生成模块,用于对所述多传感器信息进行坐标变换,生成位姿初始值;自定义点云信息确定模块,用于根据所述激光点云信息确定自定义点云信息;因子图模型优化模块,用于根据所述自定义点云信息,计算约束因子并根据所述约束因子优化因子图模型;地图优化模块,用于根据所述点云信息、所述多传感器信息、所述位姿初始值以及所述因子图模型,输出轨迹信息以及全局地图;传感器单元,所述传感器单元包括gps、激光雷达以及imu,所述传感器单元与所述信息获取模块通信连接。
11、根据本申请的第三个方面,本申请还提供了一种工程车辆,此工程车辆包括:上述基于激光雷达的建图与定位系统。
12、本申请提供了一种基于激光雷达的建图与定位方法、系统及工程车辆,其中的基于激光雷达的建图与定位方法对地图优化的算法进行了改进,使得这种建图与定位方法得以在不影响定位精度的同时,对上述gps信息、imu信息进行坐标变换,使得上述信息由原始坐标转变至激光雷达坐标系,由此改善6轴惯性传感器对于车身姿态角无法全面获取的问题,使得应用上述方法的系统使用6轴惯性传感器即可获取位姿信息,进一步提高了的lio-sam算法应用于自动驾驶车辆和数据集时精度和鲁棒性;基于不同传感器信息的坐标转换算法,改善了实际使用中gps定位设备的安装位置可能与imu的安装位置不同的问题。
13、此外,上述方法采用局部地图匹配代替全局地图匹配可以显着提高slam系统的实时性能。
14、再者,该方法进行了是否需要将当前激光帧设为关键帧的判断,即可以对历史关键帧进行更新,如此可以有选择地选择的新关键帧注册到固定大小的先验子关键帧集,以此进一步提升实时性能。
技术特征:
1.一种基于激光雷达的建图与定位方法,其特征在于,包括:
2.根据权利要求1所述的基于激光雷达的建图与定位方法,其特征在于,获取imu位姿信息包括:
3.根据权利要求2所述的基于激光雷达的建图与定位方法,其特征在于,所述根据所述激光点云信息确定自定义点云信息,包括:
4.根据权利要求2所述的基于激光雷达的建图与定位方法,其特征在于,所述根据所述自定义点云信息、所述多传感器信息、所述位姿初始值以及所述因子图模型,输出轨迹信息以及全局地图,包括:
5.根据权利要求4所述的基于激光雷达的建图与定位方法,其特征在于,所述对所述位姿初始值进行初始化,获取当前帧激光位姿初始值,包括:
6.根据权利要求4所述的基于激光雷达的建图与定位方法,其特征在于,在所述根据所述优化后的局部地图以及原始全局地图,输出轨迹信息以及全局地图之后,所述方法还包括:
7.根据权利要求4所述的基于激光雷达的建图与定位方法,其特征在于,所述根据所述自定义点云信息、所述多传感器信息,计算激光里程计,包括:
8.根据权利要求1所述的基于激光雷达的建图与定位方法,其特征在于,所述对所述多传感器信息进行坐标变换,生成位姿初始值包括:
9.一种基于激光雷达的建图与定位系统,其特征在于,包括:
10.一种工程车辆,其特征在于,包括权利要求9所述的基于激光雷达的建图与定位系统。
技术总结
本申请涉及工程车辆领域,具体涉及一种基于激光雷达的建图与定位方法、系统及工程车辆。此方法包括获取多传感器信息;对多传感器信息进行坐标变换,生成位姿初始值;根据激光点云信息确定自定义点云信息;根据自定义点云信息,计算约束因子并根据约束因子优化因子图模型;根据点云信息、多传感器信息、位姿初始值以及因子图模型,输出轨迹信息以及全局地图。这种基于激光雷达的建图与定位方法对地图优化的算法进行了改进,使得这种建图与定位方法得以在不影响定位精度的同时,使用6轴惯性传感器获取位姿信息,提高了的LIO‑SAM算法应用于自动驾驶车辆和数据集时精度和鲁棒性。
技术研发人员:董洋,高乐,邓加成
受保护的技术使用者:三一重机有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!