雷达转台校北控制系统的制作方法
本发明涉及雷达,具体涉及一种具备校北功能的雷达转台校北控制系统。
背景技术:
1、在飞机指挥系统中,为了定位飞机位置,提高飞机安全性能,一般都会在地面设置指挥系统。目前的指挥系统具备完善的自检、状态监视及上报功能、驱动转台运动的功能、声音报警功能、本/遥控切换功能、以太网通讯udp协议功能、通过以太网接口接收上位机控制命令控制转台功能、通过以太网接口实时返回转台工作状态及故障信息功能、急停操作实现安全保护功能。上述的这些功能都是集成在一起,另外配合校北系统,进行定位,相当冗繁,因此需要一种具备校北功能的雷达转台校北控制系统。
技术实现思路
1、针对现有技术中的缺陷,本发明提供一种具备校北功能的雷达转台校北控制系统。
2、本发明采用的技术方案是:
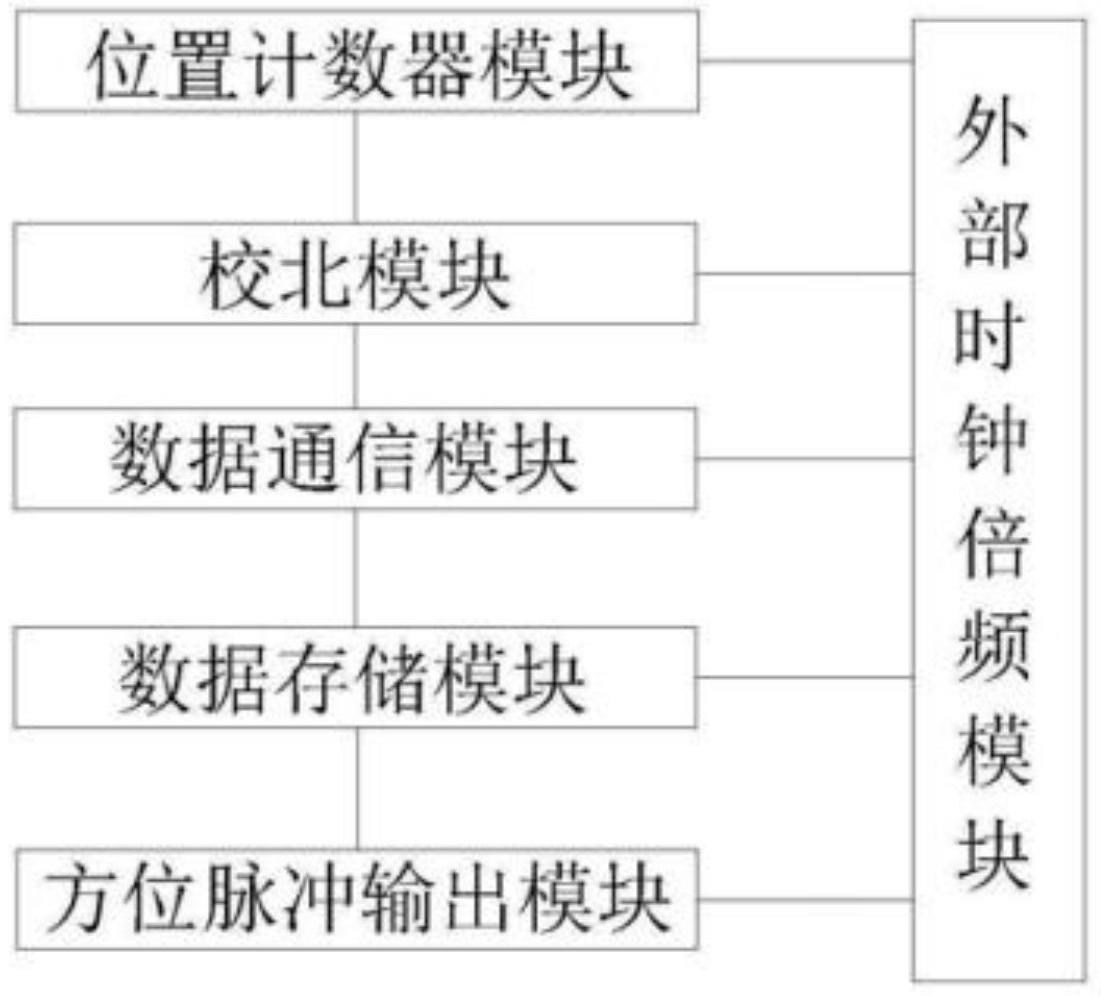
3、一种雷达转台校北控制系统,包括:位置计数器模块、校北模块、数据存储模块、方位脉冲输出模块及外部时钟倍频模块;位置计数器模块、校北模块、数据通信模块及方位脉冲输出模块在fpga中并行工作;
4、所述外部时钟倍频模块分别与所述位置计数器模块、所述校北模块、所述数据存储模块及所述方位脉冲输出模块连接;所述外部时钟倍频模块用于为所述位置计数器模块、所述校北模块、所述数据存储模块及所述方位脉冲输出模块持续输入时钟频率信号;
5、所述位置计数器模块用于根据时钟频率信号采集编码器输入的编码器信号进行计数,并将所述编码器信号转化为位置信号,存入数据存储模块;所述编码器信号包括相差90°的方波信号及零位脉冲信号;所述方波信号组成状态机,所述位置计数器模块根据所述状态机的状态变化进行加减计数,若状态机的状态维持不变或出现不连续的变化时,所述位置计数器模块不进行计数,当零位脉冲信号出现时,所述位置计数器模块的值清零;
6、所述方位脉冲输出模块与所述位置计数器模块连接,所述方位脉冲输出模块用于根据所述位置信号输出脉冲信号;
7、所述校北模块与所述数据存储模块连接,所述校北模块用于获取当前的位置信号,并将当前的位置信号与原始存储的位置信号进行比对,进行校北。
8、为更好地实现本发明,所述外部时钟倍频模块采用外部有源晶振作为时钟源,通过fpga内部锁相倍频模块生成全局同步时钟和生成输出脉冲的时钟。
9、为更好地实现本发明,所述编码器为增量式编码器。
10、所述的编码器信号经四倍频后,每圈有32768个位置,雷达主机每圈的计数脉冲信号为16384个。
11、为更好地实现本发明,若所述状态机在连续多个时钟周期内均为相同的状态,则确认状态机的状态。
12、为更好地实现本发明,所述方波信号按照正交关系输出。
13、为更好地实现本发明,所述的方位脉冲输出模块输出脉冲信号的过程包括:
14、当位置计数器模块的数据发生变化时,判断设备的旋转方向是否正确;
15、若设备旋转方向正确,则所述方位脉冲输出模块输出脉冲信号;所述脉冲信号包括方位计数脉冲信号和方位复位脉冲信号;
16、将方位计数脉冲信号置高,并根据所述位置计数器模块的过零标志判断计数是否经过相对零点,若是,则将方位复位脉冲信号置高,时钟计时计数器开始工作;
17、计时10μs后,将方位计数脉冲信号和方位复位脉冲信号置低,清过零标志,结束使能。
18、为更好地实现本发明,所述雷达转台校北控制系统还包括数据通信模块;所述数据通信模块采用rs485与plc控制器进行串行通信。
19、本发明的有益效果体现在:本发明的雷达转台校北控制系统通过外部时钟模块为位置计数器模块、校北模块、数据通信模块、数据存储模块以及方位脉冲输出模块持续输入时钟频率信号;位置计数器模块根据时钟频率信号记录编码器输入的编码器信号,并转化为位置信号,存入数据存储模块当中;方位脉冲输出模块根据位置计数器模块记录的位置信号,输出脉冲信号;校北模块与数据存储模块关联,获取当前的位置信号与原始存储的位置信号进行比对,进行校北。与现有的指挥系统集成在一起,使得指挥系统具备校北功能,无需分开单独设计校北系统,而且基于fpga工作,大大减少了延迟效应。
技术特征:
1.一种雷达转台校北控制系统,其特征在于,所述雷达转台校北控制系统包括:位置计数器模块、校北模块、数据存储模块、方位脉冲输出模块及外部时钟倍频模块;位置计数器模块、校北模块、数据通信模块及方位脉冲输出模块在fpga中并行工作;
2.根据权利要求1所述的雷达转台校北控制系统,其特征在于,所述外部时钟倍频模块采用外部有源晶振作为时钟源,通过fpga内部锁相倍频模块生成全局同步时钟和生成输出脉冲的时钟。
3.根据权利要求1所述的雷达转台校北控制系统,其特征在于,所述编码器为增量式编码器。
4.根据权利要求1所述的雷达转台校北控制系统,其特征在于,所述编码器信号经四倍频后,每圈有32768个位置,雷达主机每圈的计数脉冲信号为16384个。
5.根据权利要求1所述的雷达转台校北控制系统,其特征在于,若所述状态机在连续多个时钟周期内均为相同的状态,则确认状态机的状态。
6.根据权利要求1所述的雷达转台校北控制系统,其特征在于,所述方波信号按照正交关系输出。
7.根据权利要求1所述的雷达转台校北控制系统,其特征在于,所述方位脉冲输出模块输出脉冲信号的过程包括:
8.根据权利要求1所述的雷达转台校北控制系统,其特征在于,所述雷达转台校北控制系统还包括数据通信模块;所述数据通信模块采用rs485与plc控制器进行串行通信。
技术总结
本发明提供一种雷达转台校北控制系统,涉及雷达技术领域,雷达转台校北控制系统包括:外部时钟模块为位置计数器模块、校北模块、数据存储模块及方位脉冲输出模块持续输入时钟频率信号;位置计数器模块根据时钟频率信号记录编码器输入的编码器信号,并转化为位置信号,存入数据存储模块;方位脉冲输出模块根据位置计数器模块记录的位置信号输出脉冲信号;校北模块与数据存储模块关联,获取当前的位置信号与原始存储的位置信号进行比对,进行校北。本发明与现有的指挥系统集成在一起,使得指挥系统具备校北功能,无需分开单独设计校北系统,而且基于FPGA工作,大大减少了延迟效应。
技术研发人员:谭自力
受保护的技术使用者:四川中科成光科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!