空气气溶胶采样检测一体化机器人
本发明涉及生物安全监测,尤其涉及一种空气气溶胶采样检测一体化机器人。
背景技术:
1、气溶胶是指悬浮在气体介质中的固态或液态颗粒所组成的气态分散系统,其中气态为连续相,固态或液态颗粒为分散相,进而构成整体的多相流体特性。固态或液态颗粒构成的分散相来源不同差异显著,如植物花粉形成的气溶胶胶粒径约5-100微米,木材及烟草燃烧形成的气溶胶粒径约0.01-1000微米;若分散相为微生物或其代谢产物则称为“生物气溶胶”,其复杂性进一步增大。生物气溶胶中的分散相可能是粒径<0.01微米的毒素、0.02-0.25微米的病毒、0.5-5微米的细菌、2-30微米的真菌。若是附着在其它固态或液态颗粒上则粒径更为复杂,也由此导致多相流体中的稳定连续相(空气)与多样分散相(固态或液态颗粒)流体行为的显著差异。生物气溶胶中的毒素、病毒、细菌、真菌等在不同程度上对生命健康、疾控应急、生物安全构成风险。
2、生物气溶胶中生物物质收集的目的是启动后续深入分析,同时富集后的生物物质存在生物危害提升的风险,在先技术针对生物气溶胶采样过程中,采样设备仅能够实现采样功能,缺少采样器灵活移动自动采样的智能化设计,且采样设备仅聚焦硬件设备,未能将设备特点、采样液特性、生物颗粒、后续分析进行兼容性设计,仅能够实现采样功能,缺少采样液与后续检测端衔接的兼容性设计。
3、因此,亟需一种能够解决上述问题的空气气溶胶采样检测一体化机器人。
技术实现思路
1、本发明提供一种空气气溶胶采样检测一体化机器人,通过控制模组中的中央控制系统对气溶胶采样模组和运动模组发出控制信号,能够使机器人灵活移动到特定区域进行采样,采样范围广,采样广谱覆盖高,还能够通过样本检测模块对样本进行检测,实现气溶胶采样检测一体化。
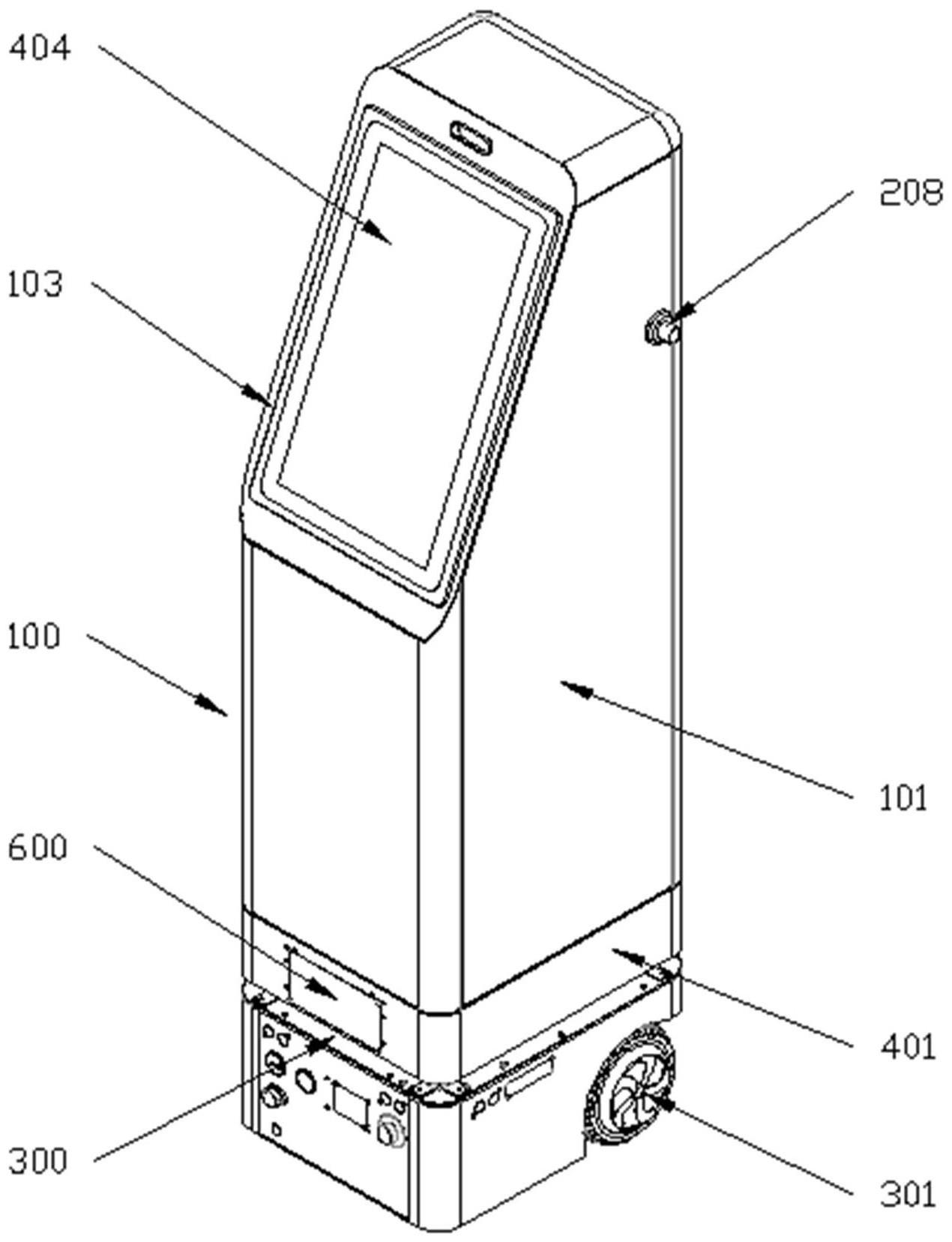
2、本发明提供一种空气气溶胶采样检测一体化机器人,包括机器人本体,所述机器人本体上设有气溶胶采样模组、运动模组、样本检测模组和控制模组;
3、所述气溶胶采样模组包括进气管、出气管、采样杯和风机,所述进气管与所述采样杯连通,所述进气管与所述风机的进气口连通,所述出气管与所述风机的出气口连通;
4、所述运动模组包括用于提供动力的动力轮和用于转向的转向轮;
5、所述样本检测模组包括物料存放装置、驱动泵和检测装置,所述物料存放装置通过管路与所述驱动泵连接,所述驱动泵通过管路与所述检测装置连接;
6、所述控制模组包括中央控制系统,所述中央控制系统可发出对所述气溶胶采样模组、所述运动模组和所述样本检测模组的控制信号。
7、根据本发明提供的空气气溶胶采样检测一体化机器人,所述物料存放装置包括多个用于存放物料的存放腔,每个所述存放腔分别通过管路与所述驱动泵连接,每个所述存放腔内均滑动配合设有活塞。
8、根据本发明提供的空气气溶胶采样检测一体化机器人,所述样本检测模组还包括用于存放检测所涉及试剂的ep管。
9、根据本发明提供的空气气溶胶采样检测一体化机器人,所述样本检测模组还包括四通接头,所述ep管通过管路与所述四通接头连接,所述驱动泵通过管路与所述四通接头连接,所述四通接头通过管路与所述检测装置连接。
10、根据本发明提供的空气气溶胶采样检测一体化机器人,所述样本检测模组还包括用于调节温度的温度调节装置。
11、根据本发明提供的空气气溶胶采样检测一体化机器人,所述控制模组还包括物联网模块、二维码扫描模块、终端显示屏中的至少一个;
12、所述物联网模块包括蓝牙模块、4g模块、5g模块或wifi模块中的一种或任意多种;所述二维码扫描模块可用于扫描所述采样杯上的二维码;所述终端显示屏为电容触摸屏或电阻触摸屏。
13、根据本发明提供的空气气溶胶采样检测一体化机器人,所述运动模组还包括激光雷达、数据接口中的至少一个;
14、所述激光雷达设置在所述机器人本体上,所述激光雷达可向所述控制模组反馈所述机器人本体行进过程的实时状态信号;所述数据接口可用于传输数据至所述控制模组。
15、根据本发明提供的空气气溶胶采样检测一体化机器人,所述机器人本体上设有采样液接口,所述采样液接口与所述采样杯连通。
16、根据本发明提供的空气气溶胶采样检测一体化机器人,所述气溶胶采样模组还包括涡旋导流装置,所述涡旋导流装置的内壁设有螺旋状凸起,所述风机的进气口与所述涡旋导流装置连通,所述进气管与所述涡旋导流装置侧壁上的开口连通,所述采样杯与所述涡旋导流装置连通;
17、所述采样杯的内腔为倒锥形结构。
18、根据本发明提供的空气气溶胶采样检测一体化机器人,所述进气管上连接设有多根连接管,每根所述连接管的内径不同,每根所述连接管的出口端与所述涡旋导流装置的侧壁上的开口连通;
19、每根所述连接管上分别设有阀门机构,所述阀门机构用于控制所述连接管的通断,所述中央控制系统可对每个所述阀门机构发出控制信号。
20、根据本发明提供的空气气溶胶采样检测一体化机器人,所述出气管上设有包括流量计、病原过滤装置、消音装置中的至少一个。
21、本发明提供的空气气溶胶采样检测一体化机器人,通过控制模组中的中央控制系统对气溶胶采样模组和运动模组发出控制信号,控制信号控制运动模组中的动力轮驱动机器人行进,转向轮驱动机器人转向,且控制信号还能控制气溶胶采样模组中的风机运行,能够使机器人灵活移动到特定区域进行采样,采样范围广,采样广谱覆盖高,还能够通过样本检测模块对样本进行检测,实现气溶胶采样检测一体化。
22、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种空气气溶胶采样检测一体化机器人,其特征在于,包括机器人本体,所述机器人本体上设有气溶胶采样模组、运动模组、样本检测模组和控制模组;
2.根据权利要求1所述的空气气溶胶采样检测一体化机器人,其特征在于,所述物料存放装置包括多个用于存放物料的存放腔,每个所述存放腔分别通过管路与所述驱动泵连接,每个所述存放腔内均滑动配合设有活塞。
3.根据权利要求1所述的空气气溶胶采样检测一体化机器人,其特征在于,所述样本检测模组还包括用于存放检测所涉及试剂的ep管。
4.根据权利要求3所述的空气气溶胶采样检测一体化机器人,其特征在于,所述样本检测模组还包括四通接头,所述ep管通过管路与所述四通接头连接,所述驱动泵通过管路与所述四通接头连接,所述四通接头通过管路与所述检测装置连接。
5.根据权利要求1所述的空气气溶胶采样检测一体化机器人,其特征在于,所述样本检测模组还包括用于调节温度的温度调节装置。
6.根据权利要求1所述的空气气溶胶采样检测一体化机器人,其特征在于,所述控制模组还包括物联网模块、二维码扫描模块、终端显示屏中的至少一个;
7.根据权利要求1所述的空气气溶胶采样检测一体化机器人,其特征在于,所述运动模组还包括激光雷达、数据接口中的至少一个;
8.根据权利要求1所述的空气气溶胶采样检测一体化机器人,其特征在于,所述机器人本体上设有采样液接口,所述采样液接口与所述采样杯连通。
9.根据权利要求1-8任一项所述的空气气溶胶采样检测一体化机器人,其特征在于,所述气溶胶采样模组还包括涡旋导流装置,所述涡旋导流装置的内壁设有螺旋状凸起,所述风机的进气口与所述涡旋导流装置连通,所述进气管与所述涡旋导流装置侧壁上的开口连通,所述采样杯与所述涡旋导流装置连通;
10.根据权利要求9所述的空气气溶胶采样检测一体化机器人,其特征在于,所述进气管上连接设有多根连接管,每根所述连接管的内径不同,每根所述连接管的出口端与所述涡旋导流装置的侧壁上的开口连通;
11.根据权利要求1-8任一项所述的空气气溶胶采样检测一体化机器人,其特征在于,所述出气管上设有包括流量计、病原过滤装置、消音装置中的至少一个。
技术总结
本发明提供一种空气气溶胶采样检测一体化机器人,包括机器人本体,机器人本体上设有气溶胶采样模组、运动模组、样本检测模组和控制模组;气溶胶采样模组包括进气管、出气管、采样杯和风机,进气管与采样杯连通,进气管与风机的进气口连通,出气管与风机的出气口连通;运动模组包括用于提供动力的动力轮和用于转向的转向轮;样本检测模组包括物料存放装置、驱动泵和检测装置,物料存放装置通过管路与驱动泵连接,驱动泵通过管路与检测装置连接;控制模组包括中央控制系统。能够使机器人灵活移动到特定区域进行采样,采样范围广,采样广谱覆盖高,还能够通过样本检测模块对样本进行检测,实现气溶胶采样检测一体化。
技术研发人员:周蕾,胡秋实,宋鹏,李佳昊,钟颖翠,刘旭,孙崇思
受保护的技术使用者:中国科学院过程工程研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!