用于估计对象的位置的方法与流程
本发明涉及一种用于估计对象相对于多个传感器模块的位置的方法。
背景技术:
1、对射频发射机(在下文中称为对象)的位置进行定位的传统方法是基于低频定位技术的。这些传统方法是基于对对象所发射的电磁场的强度进行重复测量并将测量值与先前收集的数据进行比较的。这种所谓的“指纹对比(fingerprinting)”方法给出了对象所在区域的粗略估计。然而,以这种方式估计的对象位置缺乏准确性。
2、现代方法依赖于诸如基于蓝牙的定位和基于超宽带的定位的技术。基于蓝牙的定位基于相位测距、飞行时间和/或到达角度测量,而基于超宽带的定位聚焦于飞行时间测量。利用这些技术,可以用更高的精度估计对象的位置。对于许多应用,精度优选为10cm或更好。
3、用于基于测量结果来估计对象位置的传统方法采用诸如线性最小二乘法或基于核的解的解。
技术实现思路
1、本公开中提出的新颖方法提供了用于估计对象相对于多个传感器模块的位置的方法。术语“对象”描述了发送可由多个传感器模块测量的信号的设备。
2、与传统方法相比,所提出的方法旨在实现更精确的位置估计,该位置估计是基于包含不准确性的测量数据并且可以更有效地计算。所提出的方法不使用复杂的数学公式而仅使用基本的算术运算来处理来自多个传感器模块的测量数据。因此,与常规方法相比,所提出的方法可提供改进的计算效率,并且因此可在低功率计算装置上实施。此外,可以将对象的估计位置的精度水平调整到特定要求。
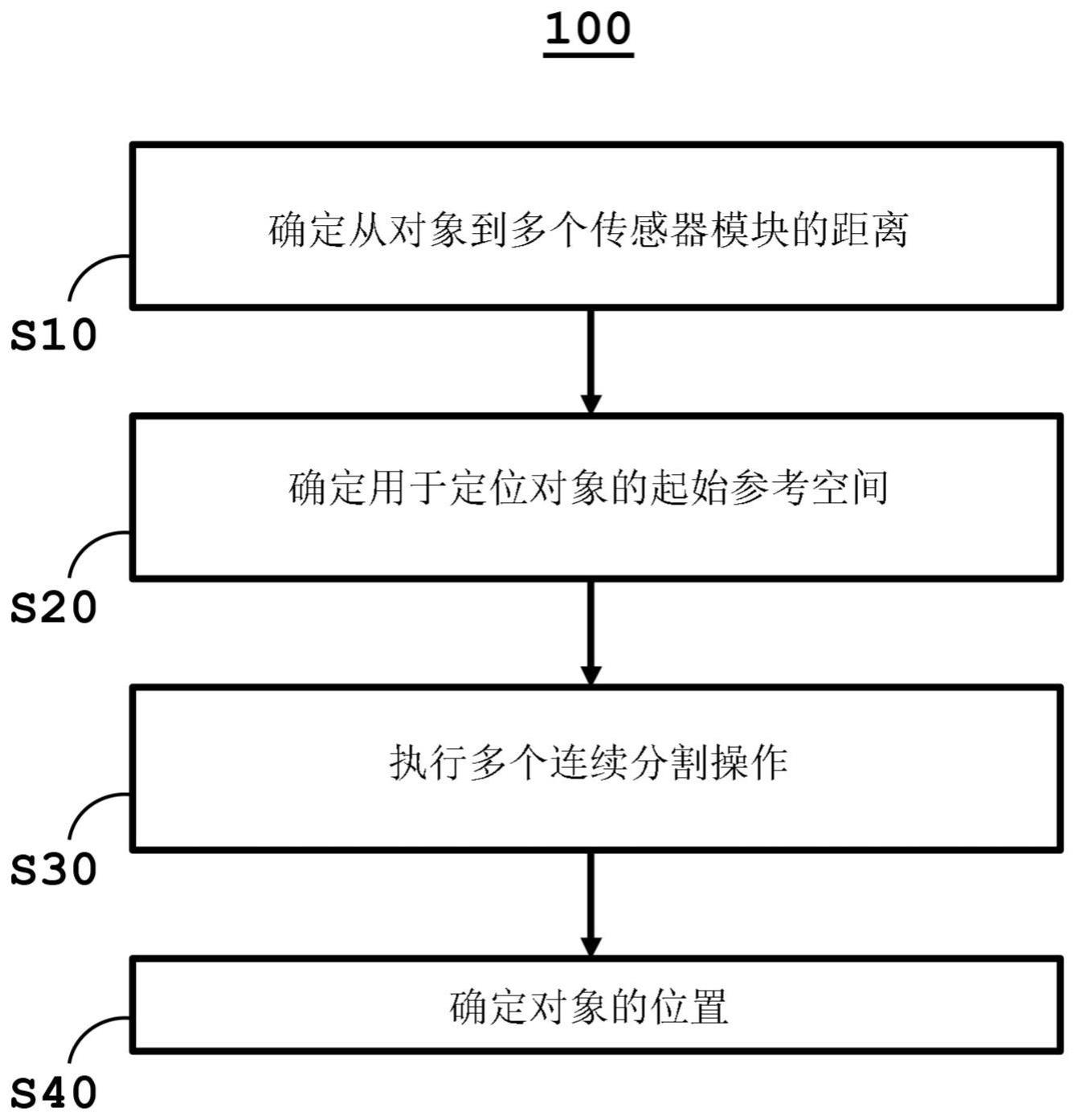
3、一个方面涉及用于估计对象相对于安装在一设备上的多个传感器模块的位置的方法。该方法包括以下步骤:对于多个传感器模块中的每一个,通过在对象与相应的传感器模块之间交换信号来确定从对象到相应的传感器模块的距离;以及基于所述设备上的多个传感器模块的多个确定的距离和位置来确定指示所述对象的位置估计的起始参考空间。该方法还包括执行起始参考空间的多个连续分割操作,用于改进对象的位置估计,直到满足预定标准。每个分割操作包括:将当前参考空间分割为子空间,每个子空间指示对象的可能位置;在每个子空间上分配指示对象位于相应子空间中的置信度的置信因子;以及基于置信因子从子空间中选择新的参考空间。最后,该方法包括根据最后的分割操作,基于新的参考空间来确定对象的位置。
4、在另一方面,起始参考空间和子空间是由平行于坐标系的一个或更多个轴的边界来定义的,并且所述坐标系是根据多个传感器模块的距离测量结果来定义的。
5、在另一方面,在每个分割操作中,当前参考空间的分割是平行于坐标系的一个或更多个轴执行的。
6、在另一方面,执行分割所平行于的坐标系的一个或更多个轴在连续的分割操作之间改变。
7、在另一方面,每个分割操作将当前参考空间分割为大小相等的两个子空间。
8、在另一方面,选择新的参考空间的步骤包括:针对每个子空间,确定相应子空间的质心;针对每个子空间,基于从每个传感器模块的位置到相应子空间的质心的距离,计算置信因子,并且所述距离是由每个传感器模块确定的。
9、在另一方面中,所述多个距离包括基于所述多个传感器模块中的每一者的定位精度的多个不确定性。
10、在另一方面,当满足第一标准和第二标准中的至少一个时,满足预定标准,其中,当分割操作的数量超过预定数量时满足第一标准,并且当新的参考空间的大小小于预定阈值大小时满足第二标准。
11、在另一方面中,所述多个距离是基于飞行时间测量、信号强度测量或基于相位的测距来确定的。
12、在另一方面,所述对象由钥匙、可穿戴设备或便携式计算设备提供。
13、在另一方面,所述装置是车辆、门或储存空间。
14、在另一方面,该方法还包括基于所确定的对象位置来解锁车辆、门或储存空间。
15、在另一方面,对象和多个传感器模块是基于蓝牙技术或超宽带技术的。
16、在另一方面,一种数据处理装置包括用于执行前述方面中任一方面所述的方法的单元。
17、在另一方面,一种车辆包括根据所述方面所述的数据处理装置。
技术特征:
1.一种估计对象相对于安装在设备上的多个传感器模块的位置的方法,所述方法包括以下步骤:
2.根据权利要求1所述的方法,其中,
3.根据权利要求2所述的方法,其中,在各个分割操作中,所述当前参考空间的分割是平行于所述坐标系的一个或更多个轴执行的。
4.根据权利要求3所述的方法,其中,执行所述分割所平行于的所述坐标系的所述一个或更多个轴在连续分割操作之间被改变。
5.根据权利要求1至4中任一项所述的方法,其中,各个分割操作将所述当前参考空间分割成大小相等的两个子空间。
6.根据权利要求1至5中任一项所述的方法,其中,选择新的参考空间的步骤包括:
7.根据权利要求1至6中任一项所述的方法,其中,所述多个距离包括基于所述多个传感器模块中的各个传感器模块的定位精度的多个不确定性。
8.根据权利要求1至7中任一项所述的方法,其中,当满足第一标准和第二标准中的至少一个标准时,满足所述预定标准,其中,
9.根据权利要求1至8中任一项所述的方法,其中,所述多个距离是基于飞行时间测量、信号强度测量或基于相位的测距来确定的。
10.根据权利要求1至9中任一项所述的方法,其中,所述对象是由钥匙、可穿戴设备或便携式计算设备提供的。
11.根据权利要求1至10中任一项所述的方法,其中,所述设备是车辆、门或储存空间。
12.根据权利要求11所述的方法,所述方法还包括以下步骤:
13.根据权利要求1至12中任一项所述的方法,其中,所述对象和所述多个传感器模块是基于蓝牙技术或超宽带技术的。
14.一种数据处理装置,所述数据处理装置包括用于执行根据权利要求1至13中任一项所述的方法的装置。
15.一种车辆,所述车辆包括根据权利要求14所述的数据处理装置。
技术总结
用于估计对象的位置的方法。本公开涉及用于估计对象相对于安装在设备上的多个传感器模块的位置的方法。该方法包括:针对多个传感器模块中的每一者,通过在对象与相应的传感器模块之间交换信号来确定从对象到相应的传感器模块的距离;基于设备上的多个传感器模块的确定的距离和位置来确定指示对象的位置估计的起始参考空间;执行起始参考空间的连续分割操作以改进对象位置估计,直到满足预定标准,每个分割操作包括:将当前参考空间分割为子空间,每个子空间指示对象的可能位置;在每个子空间上分配指示对象位于相应子空间中的置信度的置信因子;基于置信因子从子空间中选择新的参考空间;根据最后的分割操作,基于新的参考空间来确定对象的位置。
技术研发人员:A·罗布勒维斯卡,M·罗马斯泽克,G·维辛斯基
受保护的技术使用者:APTIV技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!