一种风力机模型多功能机舱
本发明涉及浮式风力机模型试验领域,尤其涉及一种风力机模型多功能机舱。
背景技术:
1、随着传统化石能源的日益枯竭以及人们环保意识的增强,清洁、环保的可再生能源愈来愈受到世界各国的广泛关注。风能是可再生能源中最具商业化前景的资源形式之一。由于海洋风能具有风速大、风场稳定、开发空间广阔、视觉污染少、远离沿海人口密集区域等优势,风力机逐渐由陆地和近海区域向海洋发展。但随着水深的增加,固定式风力机的成本激增,浮式风力机将成为未来发展的方向。然而,在风、浪、流的联合作用下,浮式风力机的运动响应要比固定式风力机复杂的多,为浮式风力机开发计算与性能评估方法形成挑战。因此,如何进行较为准确的水池模型试验,以验证各种数值计算方法是一个很重要的问题。
2、在现代大型风力机上,集成了多种控制、监测装置。偏航机构用来快速平稳地对准风向,以便风轮获得最大的风能;变转速机构用来控制风轮转速,提高风能利用率;变桨距控制系统用来提高输出功率、降低结构荷载。运动、载荷、应力等监测机构用来实时监测风力机载荷,预防破坏等等。如何在浮式风力机水池模型试验中,精确还原上述控制/监测装置及其运行机制,是目前浮式风力机模型试验技术中亟待解决的关键问题。
3、目前尚没有能够集成多种控制和监测功能的浮式风力机模型试验机舱,很大程度上限制了浮式风力机模型试验的试验能力和可靠性。
4、因此,本领域的技术人员致力于开发一种风力机模型多功能机舱。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是在浮式风力机机舱模型中,同时集成偏航、变速和变桨等控制系统,提高浮式风力机水池模型试验技术,为以后大型浮式风力机的优化提供试验方案。
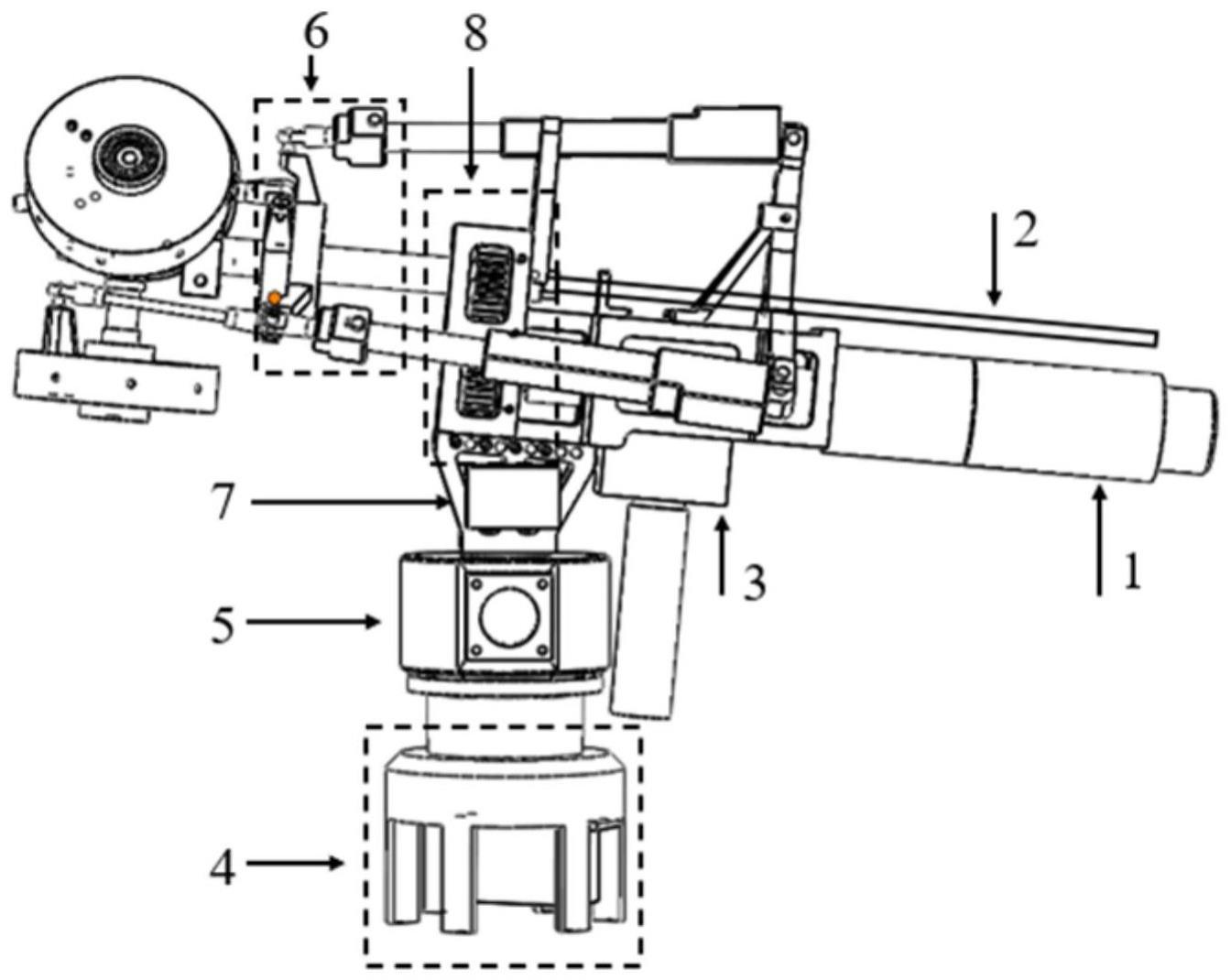
2、为实现上述目的,本发明提供了一种风力机模型多功能机舱,其特征在于,所述机舱包括伺服电机、光纤滑环、扭矩传感器、偏航机构、六自由度传感器、独立变桨机构、加速度传感器和齿轮传动系统,其中,
3、所述伺服电机,前端固定在所述机舱上,通过所述齿轮传动系统,将所述伺服电机的转动传递给所述机舱的主轴,带动所述机舱的风轮转轴旋转;
4、所述光纤滑环,通过所述主轴的孔道和所述机舱中间的光纤滑环孔道向前延伸,在叶片上粘接第一应变片,所述第一应变片实时监测所述叶片载荷;
5、所述扭矩传感器,安装在靠近所述伺服电机前方的机舱金属架上,测量所述风力机上部的扭矩载荷大小;
6、所述偏航机构,安装在所述机舱的最下方位置,实时根据风向调整所述机舱的方向;
7、所述六自由度传感器,安装在所述机舱的中下部位置,所述六自由度传感器的测力面在所述六自由度传感器上部,通过第二应变片的变化测量所述安装位置的受力大小;
8、所述独立变桨机构,安装在所述机舱的中部,实时改变所述叶片的桨距角;
9、所述加速度传感器,安装在机舱支撑架的侧面位置,测量所述风力机上部的加速度大小,实现所述风力机运动数据的测量。
10、进一步地,所述伺服电机前端通过定位螺孔固定在所述机舱上,并通过键槽与第一联轴器相连,所述第一联轴器与所述扭矩传感器第一端相连,所述扭矩传感器第二端通过第二联轴器连接所述齿轮传动系统。
11、进一步地,所述伺服电机的末端通过数据线与上位机相连,通过所述上位机实时调整所述伺服电机转速,进而实时调整所述风轮转速。
12、进一步地,所述偏航机构包括舵机、电机架和法兰盘,所述法兰盘安装在所述电机架上,所述法兰盘的上部与所述六自由度传感器相连,所述舵机可带动安装在所述舵机上部的所述机舱旋转。
13、进一步地,所述六自由度传感器通过定位螺栓与所述机舱支撑架相连接,所述机舱支撑架通过侧面螺孔固定在所述机舱主体上。
14、进一步地,所述独立变桨机构为机械式独立变桨机构,安装在电动推杆支持架和电动推杆固定架上,所述电动推杆支持架和所述电动推杆固定架通过螺栓紧固在所述机舱主体上。
15、进一步地,所述独立变桨机构包括电动推杆、变桨推杆、变桨主动盘、变桨从动盘、叶根盘变桨摇臂和叶根盘;其中,所述电动推杆的一端固定在所述电动推杆固定架上,所述电动推杆的另一端通过球头螺栓固定在所述变桨主动盘上,所述变桨推杆的一端连接在所述变桨主动盘上,所述变桨推杆的另一端通过螺栓固定在所述叶根盘变桨摇臂上,所述变桨摇臂焊接在所述叶根盘上,所述变桨主动盘和所述变桨从动盘通过轴承相连接,可以绕所述主轴旋转,旋转过程中带动所述变桨推杆移动。
16、进一步地,所述电动推杆通过数据线与控制板相连接,通过上位机发送指令使所述电动推杆产生位移,所述电动推杆的移动推动所述变桨主动盘旋转,并带动所述变桨推杆的前后移动,使所述叶根盘旋转,改变所述叶片的桨距角。
17、进一步地,所述电动推杆和所述变桨推杆的数量设置为3根。
18、进一步地,所述叶根盘上设置定位螺孔,所述定位螺孔用于安装所述风力机模型的所述叶片。
19、在本发明的较佳实施方式中,本发明和现有技术相比,具有如下有益效果:
20、1、本发明利用电动推杆、电机以及舵机等,在模型尺度上集中实现风力机的偏航、变速和变桨功能,提高了浮式风力机在模型尺度下的控制能力,增强了水池模型试验的技术能力和准确性,为浮式风力机的设计和试验验证提供了良好的技术支撑;
21、2、本发明在机舱不同位置设计与传感器的连接,测量机舱的载荷和运动,同时通过光纤滑环机构可以监测叶片载荷,提高了浮式风力机机舱在模型尺度下的载荷监测能力,为浮式风力机的优化设计提供了良好的数据支撑。
22、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
技术特征:
1.一种风力机模型多功能机舱,其特征在于,所述机舱包括伺服电机、光纤滑环、扭矩传感器、偏航机构、六自由度传感器、独立变桨机构、加速度传感器和齿轮传动系统,其中,
2.如权利要求1所述的装置,其特征在于,所述伺服电机前端通过定位螺孔固定在所述机舱上,并通过键槽与第一联轴器相连,所述第一联轴器与所述扭矩传感器第一端相连,所述扭矩传感器第二端通过第二联轴器连接所述齿轮传动系统。
3.如权利要求2所述的装置,其特征在于,所述伺服电机的末端通过数据线与上位机相连,通过所述上位机实时调整所述伺服电机转速,进而实时调整所述风轮转速。
4.如权利要求1所述的装置,其特征在于,所述偏航机构包括舵机、电机架和法兰盘,所述法兰盘安装在所述电机架上,所述法兰盘的上部与所述六自由度传感器相连,所述舵机可带动安装在所述舵机上部的所述机舱旋转。
5.如权利要求1所述的装置,其特征在于,所述六自由度传感器通过定位螺栓与所述机舱支撑架相连接,所述机舱支撑架通过侧面螺孔固定在所述机舱主体上。
6.如权利要求1所述的装置,其特征在于,所述独立变桨机构为机械式独立变桨机构,安装在电动推杆支持架和电动推杆固定架上,所述电动推杆支持架和所述电动推杆固定架通过螺栓紧固在所述机舱主体上。
7.如权利要求6所述的装置,其特征在于,所述独立变桨机构包括电动推杆、变桨推杆、变桨主动盘、变桨从动盘、叶根盘变桨摇臂和叶根盘;其中,所述电动推杆的一端固定在所述电动推杆固定架上,所述电动推杆的另一端通过球头螺栓固定在所述变桨主动盘上,所述变桨推杆的一端连接在所述变桨主动盘上,所述变桨推杆的另一端通过螺栓固定在所述叶根盘变桨摇臂上,所述变桨摇臂焊接在所述叶根盘上,所述变桨主动盘和所述变桨从动盘通过轴承相连接,可以绕所述主轴旋转,旋转过程中带动所述变桨推杆移动。
8.如权利要求7所述的装置,其特征在于,所述电动推杆通过数据线与控制板相连接,通过上位机发送指令使所述电动推杆产生位移,所述电动推杆的移动推动所述变桨主动盘旋转,并带动所述变桨推杆的前后移动,使所述叶根盘旋转,改变所述叶片的桨距角。
9.如权利要求8所述的装置,其特征在于,所述电动推杆和所述变桨推杆的数量设置为3根。
10.如权利要求7所述的装置,其特征在于,所述叶根盘上设置定位螺孔,所述定位螺孔用于安装所述风力机模型的所述叶片。
技术总结
本发明公开了一种风力机模型多功能机舱,涉及浮式风力机模型试验领域,包括伺服电机、光纤滑环、扭矩传感器、偏航机构、六自由度传感器、独立变桨机构、加速度传感器和齿轮传动系统;伺服电机通过齿轮传动系统带动机舱风轮旋转;光纤滑环通过光纤滑环孔道在叶片上粘接第一应变片,实时监测叶片载荷;扭矩传感器测量风力机上部的扭矩载荷大小;偏航机构安装实时根据风向调整机舱的方向;六自由度传感器通过第二应变片的变化测量安装位置受力大小;独立变桨机构安装在机舱中部,实时改变叶片桨距角;加速度传感器测量风力机上部加速度大小。本发明在模型尺度上实现风力机的偏航、变速和变桨功能,为浮式风力机的设计和试验提供良好的技术支撑。
技术研发人员:田新亮,朱德政,温斌荣,彭志科,程正顺,李欣,王叶,侯承宇
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!