一种基于非接触式磁旋转位置传感器的电机转速测量装置及方法
本发明涉及电机转速测量,特别涉及一种基于非接触式磁旋转位置传感器的电机转速测量装置及方法。
背景技术:
1、随着工业自动化与人工智能的快速发展,在当今的工业自动化装置中或家用电器设备中,电机得到了广泛地应用与发展。转速是电动机极为重要的一个状态参数,它的测量精度将直接影响电动机其它有关参数和特性的测试以及故障检测与诊断的准确性。
2、当前主要的测量方法有离心式转速表测试方法、测速发电机测速法、闪光测速法、光电码盘测速法、霍尔元件测速法等。在上述的方法中,大多要求同轴安装传感器且同轴度要求高,安装难度比较大。稍有偏斜,便影响最终读数。并且都是硬连接,不但存在机械磨损,而且降低了编码器与系统的使用寿命。霍尔元件测速法,虽不需要硬连接,但需要加工特制的测速转盘,并在主轴上开孔固定,安装工艺较为复杂,且精度不高,只适用于精度要求一般的场合。
3、常用的数字式转速采集计算方法主要有以下3种:m法(频率法)、t法(周期法)、m/t法(频率/周期法)。其中,m法,当被测转速较高或电机转动一圈发出的转速脉冲信号的个数较大时,才有较高的测量精度,因此m法适合于高速测量;t法,在被测转速较低(相邻两个转速脉冲信号时间较大)时,才有较高的测量精度,所以t法适合于低速测量;m/t法,是同时测量检测时间和在此检测时间内光电脉冲发生器所产生的转速脉冲信号的个数来确定转速。由于同时对两种脉冲信号进行计数,因此只有“同时性”处理得当,m/t法才能有较高的测速精度。
4、经检索,专利公布号cn 104426439 a,发明创造名称:用于监测电机的旋转位置的方法和设备,该申请案监测来自所述脉冲型旋转位置传感器的信号输出以及与用于所述电动机的控制信号相关联的基准信号。基于公称转子位置、转子的公称旋转速度以及所述基准信号与来自所述脉冲型旋转位置传感器的信号输出的下降边缘之间的时间,确定与所述基准信号一致的所述电动机的转子的位置。该申请案使用的信号采集方法是在一段时间间隔内捕捉传感器脉冲信号的个数,速度的计算方法是m/t法。因此,该申请案存在适用于低分辨率脉冲型旋转位置传感器,测量精度不高,以及测量范围小,不适合高速测量,高速时脉冲信号发生振铃效应会导致测量不准确的问题。
技术实现思路
1、1.发明要解决的技术问题
2、针对现有技术中关于电机转速测量方案存在的,测速精度较差,测速范围较小,要求控制器系统严格同步,安装要求高的问题,本发明提供了一种基于非接触式磁旋转位置传感器的电机转速测量装置及方法。本发明使用模拟量采集方法,即采集信号电压,并经过快速傅里叶(fft)变换算法,将时域信号转换为频域信号,再将脉冲的频率值转换为电机的转速,提高了转速计算的精度。
3、2.技术方案
4、为达到上述目的,本发明提供的技术方案为:
5、本发明的一种基于非接触式磁旋转位置传感器的电机转速测量方法,其步骤为:
6、步骤一、采集电机旋转一圈输出的脉冲信号,基于该脉冲信号粗略地计算电机转速值;
7、步骤二、结合电机粗略速度值,得到传感器a/b引脚输出的脉冲频率,基于该脉冲频率选择采样频率;
8、步骤三、基于采样频率,采集非接触式磁旋转位置传感器a/b引脚输出的脉冲信号电压值,并实时处理采样的数据;
9、步骤四、对步骤三处理后数据进行fft变换,再对变换结果进行复数求模值运算,求出各点的幅值,并选出幅值最大的点的序列n,基于该序列数获得传感器的a/b引脚输出的脉冲信号的频率f;
10、步骤五、根据传感器的a/b引脚输出的脉冲信号频率f,进行速度换算,获得电机转速值。
11、更进一步地,步骤一中,将磁旋转位置传感器的径向充磁的圆形磁铁安装在非磁性圆形衬套中,将衬套固定在电机轴上并保持轴心一致;安装在电机轴上的磁铁,每旋转一圈输出一个脉冲信号,磁旋转位置传感器的index引脚采集该脉冲信号,使用单片机引脚的中断功能,采集传感器index引脚的脉冲信号,记录两个相邻脉冲的时间间隔δt,则电机粗略速度值
12、更进一步地,步骤二中,首先确定磁旋转位置传感器的分辨率ppr,结合电机粗略速度值,得传感器的a/b引脚输出的脉冲频率f=ppr*v,选择大于2倍的脉冲频率f作为采样频率fs。
13、更进一步地,步骤三将采集的传感器的a/b引脚输出的脉冲信号电压值按照采样时间次序,依次存入采样缓冲区中,并实时从采样缓冲区中,以存储当前采样点数值的位置为起点,向前选取2048个采样点数值,进行限幅滤波。
14、更进一步地,步骤五将传感器的a/b引脚输出的脉冲信号频率f除以传感器分辨率,换算得到电机转速值。
15、更进一步地,采样数据经过fft变换后,得到相应的频率点幅值的实部和虚部,基于该实部和虚部求得相对应的a/b相的相位角,以该相位角判断电机转动方向。
16、更进一步地,步骤四选用按时间抽选的基-2fft算法将信号从时域转换到频域。
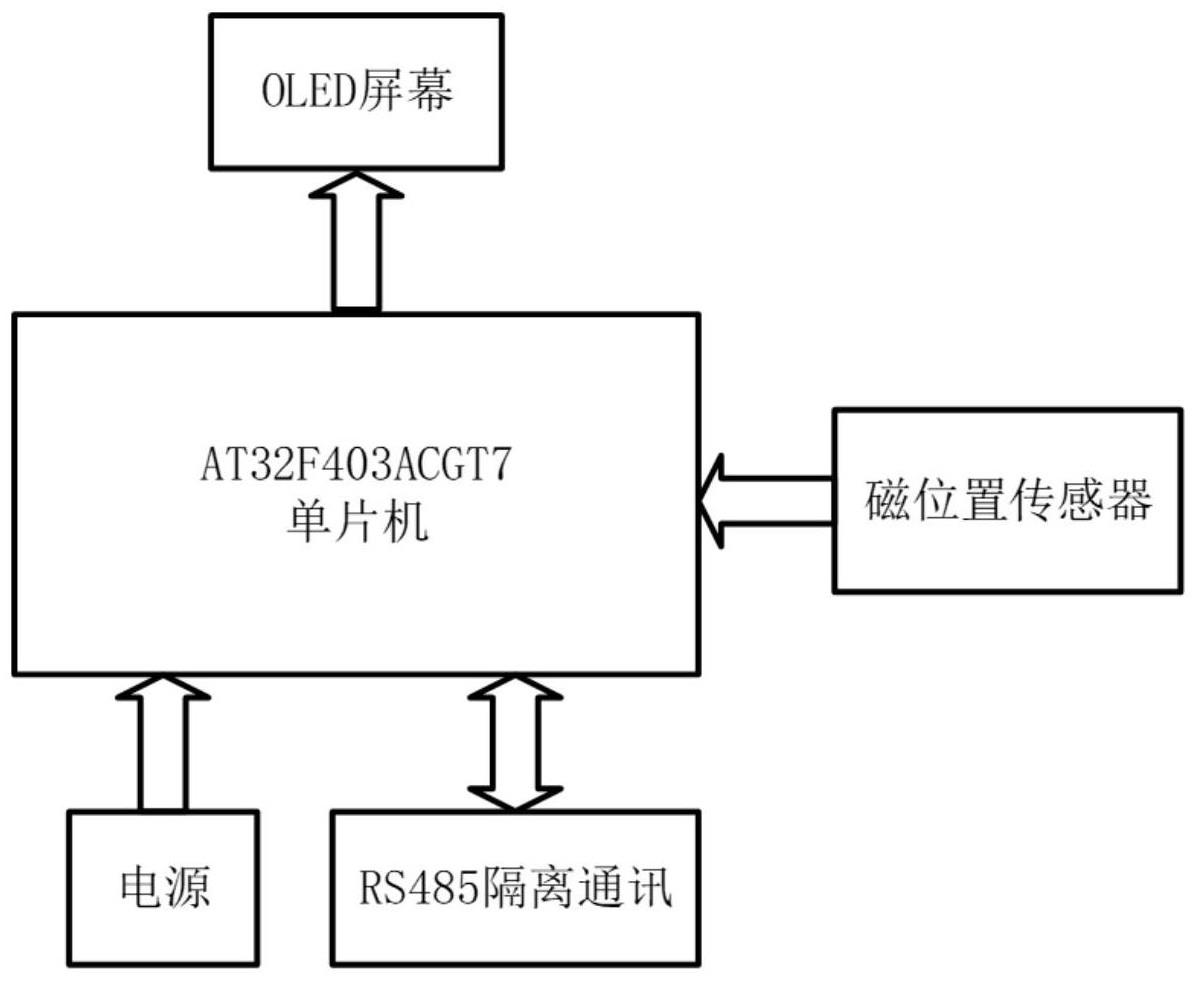
17、本发明的一种基于非接触式磁旋转位置传感器的电机转速测量装置,包括电源模块、主控芯片、磁旋转位置传感器、显示屏和通讯模块,所述的磁旋转位置传感器采用无接触式旋转编码器sc60104,使用其正交a/b输出模式;主控芯片采用at32f403acgt7单片机,单片机内部的adc模块,采集传感器芯片a/b引脚输出的脉冲信号的电压值;电机的转速和转动方向实时地显示在显示屏上,单片机通过rs-485通信接口与上位机或特定的终端机通讯,电源模块使用外接电源或锂电池供电。
18、3.有益效果
19、采用本发明提供的技术方案,与已有的公知技术相比,具有如下显著效果:
20、(1)本发明的一种基于非接触式磁旋转位置传感器的电机转速测量方法,在脉冲信号采集上,摒弃了传统采集脉冲个数的方法,改为采集脉冲信号电压。传统采集脉冲信号个数的方法适用于低分辨率的传感器,精度不高,无法进行软件滤波。本发明采集脉冲信号电压,属于一种模拟量采集方式,可以使用高采样速率,适用高分辨率传感器,精度高。
21、(2)鉴于电机在较低转速时,采样精度较低,本发明采用了可变采样频率方法,即实时计算传感器index引脚的脉冲信号个数,先粗略地计算电机转速值,根据此粗略值选择合适的采样频率,如此,在电机低转速时,自动选择低采样频率,在电机高转速时,自动选择高采样频率。如此,可以在保证信号完整性的前提下,选择合适的采样点数参与后续的fft运算,从而节约内存开销与加快系统的运行速度。
22、(3)本发明的一种基于非接触式磁旋转位置传感器的电机转速测量装置,采用无接触式旋转编码器,安装方便,提高了测量效率,使用单片机内部的adc模块,采集传感器芯片a/b引脚输出的脉冲信号的模拟量电压值,提高了采样速度与精度,使用fft变换算法,也提高了转速计算的精度。
技术特征:
1.一种基于非接触式磁旋转位置传感器的电机转速测量方法,其特征在于,其步骤为:
2.根据权利要求1所述的一种基于非接触式磁旋转位置传感器的电机转速测量方法,其特征在于:步骤一中,将磁旋转位置传感器的径向充磁的圆形磁铁安装在非磁性圆形衬套中,将衬套固定在电机轴上并保持轴心一致;安装在电机轴上的磁铁,每旋转一圈输出一个脉冲信号,磁旋转位置传感器的index引脚采集该脉冲信号,使用单片机引脚的中断功能,采集传感器index引脚的脉冲信号,记录两个相邻脉冲的时间间隔δt,则电机粗略速度值
3.根据权利要求2所述的一种基于非接触式磁旋转位置传感器的电机转速测量方法,其特征在于:步骤二中,首先确定磁旋转位置传感器的分辨率ppr,结合电机粗略速度值,得脉冲频率f=ppr*v,选择大于2倍的脉冲频率f作为采样频率fs。
4.根据权利要求3所述的一种基于非接触式磁旋转位置传感器的电机转速测量方法,其特征在于:步骤三将采集的脉冲信号电压值按照采样时间次序,依次存入采样缓冲区中,并实时从采样缓冲区中,以存储当前采样点数值的位置为起点,向前选取2048个采样点数值,进行限幅滤波。
5.根据权利要求4所述的一种基于非接触式磁旋转位置传感器的电机转速测量方法,其特征在于:步骤四中,脉冲信号频率f的计算公式为:
6.根据权利要求5所述的一种基于非接触式磁旋转位置传感器的电机转速测量方法,其特征在于:步骤五将脉冲信号频率f除以传感器分辨率,换算得到电机转速值。
7.根据权利要求6所述的一种基于非接触式磁旋转位置传感器的电机转速测量方法,其特征在于:采样数据经过fft变换后,得到相应的频率点幅值的实部和虚部,基于该实部和虚部求得相对应的a/b相的相位角,以该相位角判断电机转动方向。
8.根据权利要求7所述的一种基于非接触式磁旋转位置传感器的电机转速测量方法,其特征在于:步骤四选用按时间抽选的基-2fft算法将信号从时域转换到频域。
9.一种基于非接触式磁旋转位置传感器的电机转速测量装置,其特征在于:该装置执行如权利要求1-8任一项所述的电机转速测量方法。
10.根据权利要求9所述的一种基于非接触式磁旋转位置传感器的电机转速测量装置,其特征在于:包括电源模块、主控芯片、磁旋转位置传感器、显示屏和通讯模块,所述的磁旋转位置传感器采用无接触式旋转编码器sc60104,使用其正交a/b输出模式;主控芯片采用at32f403acgt7单片机,单片机内部的adc模块,采集传感器芯片a/b引脚输出的脉冲信号的电压值;电机的转速和转动方向实时地显示在显示屏上,单片机通过rs-485通信接口与上位机或特定的终端机通讯,电源模块使用外接电源或锂电池供电。
技术总结
本发明公开了一种基于非接触式磁旋转位置传感器的电机转速测量装置及方法,属于电机转速测量领域。本发明步骤为:一、采集电机旋转一圈的脉冲信号,粗略地计算电机转速值;二、结合粗略速度值,得到脉冲频率,并选择采样频率;三、基于采样频率,采集传感器A/B引脚输出的脉冲信号电压值,并实时处理采样的数据;四、对处理后数据进行FFT变换,再对变换结果进行复数求模值运算,求出各点的幅值,并选出幅值最大点的序列n,获得脉冲信号的频率F;五、根据频率F,进行速度换算,获得电机转速值。本发明使用模拟量采集方法,并经过FFT变换算法,将时域信号转换为频域信号,再将脉冲的频率值转换为电机的转速,提高了转速计算的精度及测速范围。
技术研发人员:王威,方挺,刘帅,刘强庆
受保护的技术使用者:安徽工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!