一种多声源定位方法
本发明属于声源定位,具体涉及一种多声源定位方法。
背景技术:
1、声源识别定位系统技术广泛应用于军用和民用领域,在民用领域中主要用于环保、无损检测和交通运输行业。
2、近年来,在麦克风阵列基础上衍生的定位技术成为研究热点。其基本原理比较简单,是通过具有一定几何扩展结构的阵列采集声源信号,通过相应的阵列信号处理技术对语音信号进行系统的分析和处理,确定声源的位置和方向。基于麦克风阵列的声源定位技术在学术界有着非常突出的研究价值和十分广泛的应用前景。
3、现有的多声源定位算法存在需要多个麦克风同时接收声信号来提高定位精度,其麦克风的数量必须大于声源的数量的问题。
技术实现思路
1、为了克服上述现有技术存在的不足,本发明提供了一种多声源定位方法。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种多声源定位方法,包括:
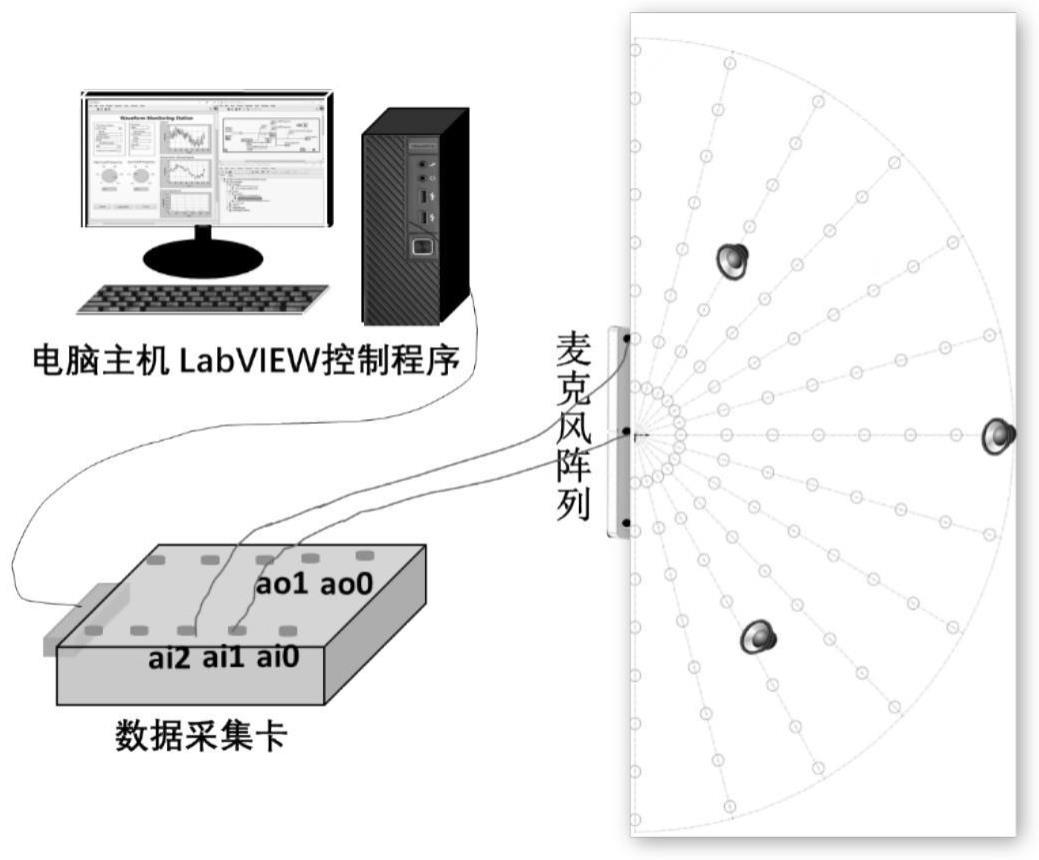
4、将三个麦克风组成一字型麦克风阵列,利用麦克风阵列接受m个单频声源发出的声源信号;
5、采集麦克风阵列接收到的声源信号,并将声源信号转化为数字信号;
6、对数字信号进行快速傅里叶变换,将每个麦克风接收到的信号分解为m个不同频率的信号;
7、计算一个麦克风与其余两个麦克风接收到同一个频率信号的时间延迟值,利用时间延迟值计算出所述单频声源的具体位置;
8、计算每一个单频声源的具体位置,实现多声源定位。
9、进一步,还包括:
10、将m个不同频率的信号的频率作为带通滤波器的中心频率,利用带通滤波器对m个不同频率的信号进行滤波处理,提取出m个不同频率的信号的有用信息;
11、根据m个不同频率的信号的有用信息,计算一个麦克风与其余两个麦克风接收到同一个频率信号的时间延迟值,利用时间延迟值计算出所述单频声源的具体位置。
12、进一步,所述数字信号的频率响应函数为:
13、
14、其中,hg(w)为幅度特性,θ(w)为相位特性,n为序列号,h(n)为滤波器系统的单位取样响应,j为虚数符号。
15、进一步,所述计算一个麦克风与其余两个麦克风接收到同一个单频声源信号的时间延迟值包括:
16、从两个麦克风收集到的m个不同频率的信号中提取出同一个频率的声源信号x1(ω)、x2(ω);
17、将x1(ω)、x2(ω)转换为互功率谱
18、利用加权函数对互功率谱进行频域加权;
19、对频域加权后的互功率谱进行反傅里叶变换,得到时域信号;
20、对时域信号进行峰值检测,得到时域信号峰值对应的序列号;
21、利用序列号得到时间延迟,其算法为:
22、
23、其中,τ为时间延迟,fs为所述数据采集卡的采样率,k为时域信号峰值对应的序列号。
24、进一步,所述互功率谱为:
25、
26、其中,x1*(ω)是第一列麦克风接收到信号傅里叶变换的共轭,x2(ω)是第二列麦克风接收到信号的傅里叶变换。
27、进一步,所述加权函数为:
28、
29、进一步,所述利用时间延迟值计算出所述单频声源的具体位置包括:
30、将时间延迟值代入单频声源与麦克风阵列的几何关系公式中,求解几何关系公式,得到发出此频率信号的单频声源的具体位置;
31、所述几何关系公式为:
32、
33、其中,xi为声源的x坐标值,yi为声源的y坐标值,d为麦克风之间的距离,c为声速,为第一个麦克风与第二个麦克风的时延值,为第一个麦克风与第三个麦克风的时延值。
34、进一步,利用牛顿迭代法求解单频声源与麦克风阵列的几何关系公式,其包括:
35、设(xk,yk)为几何关系公式k次的迭代解,在(xk,yk)的邻域做泰勒展开,保留线性项,得到:
36、
37、由此得到关系a(k)·δ(k)=b(k),其中:
38、
39、给定初始近似根和允许误差(x0,y0),ε1,ε2,假定已得到第k次的近似根为(xk,yk);
40、计算a(k),b(k);
41、计算s1=|f1(k)|+|f2(k)|,,若s1<ε1则计算结束,(xk,yk)作为满足精度要求的近似解;否则,求解代数方程组a(k)·δ(k)=b(k),得到(δx(k),δy(k));
42、计算及s2=|δx(k)|+|δy(k)|,如果s2<ε2,则计算结束,并将(xk+1,yk+1)作为满足精度要求的近似解,否则将(xk+1,yk+1)作为(xk,yk),继续进行迭代。
43、进一步,利用数据采集卡采集麦克风阵列接收到的声源信号,所述数据采集卡的采集模式为有限采样,其采样率为10ks/s,采样点为1000。
44、本发明提供的一种多声源定位方法具有以下有益效果:
45、本发明利用三个麦克风采集多个单频声源发出的声源信号,利用快速傅里叶变换将每个麦克风接收到的信号分解成多个不同频率的信号,利用三个麦克风接收到同一个频率信号的时间延迟值定位该声源信号,通过定位每一个声源信号,实现多个声源的定位。相比于现有技术,本方法只需三个麦克风,解决了现有技术中,需要多个麦克风同时接收声信号来提高定位精度,其麦克风的数量必须大于声源的数量的问题。
技术特征:
1.一种多声源定位方法,其特征在于,包括:
2.根据权利要求1所述的一种多声源定位方法,其特征在于,还包括:
3.根据权利要求1所述的一种多声源定位方法,其特征在于,所述数字信号的频率响应函数为:
4.根据权利要求1所述的一种多声源定位方法,其特征在于,所述计算一个麦克风与其余两个麦克风接收到同一个单频声源信号的时间延迟值包括:
5.根据权利要求4所述的一种多声源定位方法,其特征在于,所述互功率谱为:
6.根据权利要求4所述的一种多声源定位方法,其特征在于,所述加权函数为:
7.根据权利要求1所述的一种多声源定位方法,其特征在于,所述利用时间延迟值计算出所述单频声源的位置包括:
8.根据权利要求7所述的一种多声源定位方法,其特征在于,利用牛顿迭代法求解几何关系公式,其包括:
9.根据权利要求1所述的一种多声源定位方法,其特征在于,利用数据采集卡采集麦克风阵列接收到的声源信号,所述数据采集卡的采集模式为有限采样,其采样率为10ks/s,采样点为1000。
技术总结
本发明提供了一种多声源定位方法,属于声源定位技术领域,包括:将三个麦克风组成一字型麦克风阵列,利用麦克风阵列接受m个单频声源发出的声源信号;采集麦克风阵列接收到的声源信号,并将声源信号转化为数字信号;对数字信号进行快速傅里叶变换,将每个麦克风接收到的信号分解为m个不同频率的信号;计算一个麦克风与其余两个麦克风接收到同一个频率信号的时间延迟值,利用时间延迟值计算出所述单频声源的具体位置;计算每一个单频声源的具体位置,实现多声源定位。该方法能够利用三个麦克风组成的一字型麦克风阵列实现多个单频声源的定位。
技术研发人员:陈方天宇,陈卓尔,王英杰,尉欣然,瞿雯靓,翟世龙,王拴虎
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!