顾及时钟频率时变特性的PPP自适应钟差模型估算方法
本发明属于卫星导航授时和时间频率传递,具体涉及顾及时钟频率时变特性的ppp自适应钟差模型估算方法。
背景技术:
1、基于全球卫星导航系统(global navigation satellite system, gnss)的高精度时频传递技术自从1980年以来就已经被国际上广泛应用。目前,高精度gnss时频传递技术主要包含卫星共视(cv)、全视(av)和精密单点定位(ppp)三种gnss时间传递方法,其中cv和av受限于伪距观测数据精度的影响,其时间传递精度较低,一般为纳秒量级,而ppp时频传递技术是一种能够利用单台接收机的伪距观测数据和载波相位观测数据,借助精密卫星轨道和钟差改正数产品,可实现亚纳秒量级时间传递,且覆盖范围广。
2、传统ppp时频传递数据处理中,接收机钟差一般视为独立的白噪声进行估计,这种处理方法不仅将其他待估参数和许多未建模的误差吸收到接收机钟差中,而且忽略了原子钟本身的高稳定性和短时可预报特点,限制了时间传递精度。目前已有的接收机钟差建模大体分为以下三种方法。方法一,将历元间的接收机钟差约束为随机游走模型,其过程噪声由igs精密产品中测站钟差计算得到的hadamard方差来确定,该方法的不足之处是高性能参考时钟的输出时钟频率特性不服从随机游走分布,且观测数据采样间隔增大时,其历元间的约束会变小,导致解算得到的接收机时差偏离真实值。方法二,在kalman滤波估计接收机钟差参数的基础上,同时估计频差和频漂参数,然而该方法没对频差和频漂参数进行更新,且短时间内原子钟频差和频漂相对较稳定,逐历元更新不合理。方法三,通过事先测定测站的频差和频漂,ppp参数估计过程中作为常数值,未考虑外部参考时钟输出频率信号随环境温度、湿度、磁场以及大气压、高程对其的影响。
3、因此,介于上述方法存在的问题,并充分考虑到原子钟输出频率信号的高稳定和短时可预报的特点,提出了一种顾及时钟频率时变特性的ppp自适应钟差模型估算方法,采用不同时钟类型不同窗体长度的滑动滤波技术和误差剥离重组技术,将前一段时间ppp解算得到的接收机时差数据来进行拟合得到频率偏差和频率漂移率参数以及动态噪声协方差,并应用于当前历元接收机时差的解算,提高接收机时差解算精度。
技术实现思路
1、本发明的目的解决ppp参数估计中将接收机时差作为白噪声估计时限制了接收机时差解算精度和其他时差约束模型未考虑参考时钟频率特性时变特点的不足,本发明充分考虑接收机外接参考时钟输出频率信号的时变特性及其高稳定度和短时可预报的优点,采用不同时钟类型不同窗体长度的滑动滤波方法和误差剥离重组方法,将前一段时间ppp解算得到的接收机时差来进行拟合,得到参考时钟频率偏差和频率漂移率以及动态的总过程噪声协方差,并应用于当前历元接收机时差的解算,以提高接收机时差解算精度和ppp时间传递精度。
2、本发明的上述目的通过以下技术手段实现:
3、顾及时钟频率时变特性的ppp自适应钟差模型估算方法,包括以下步骤:
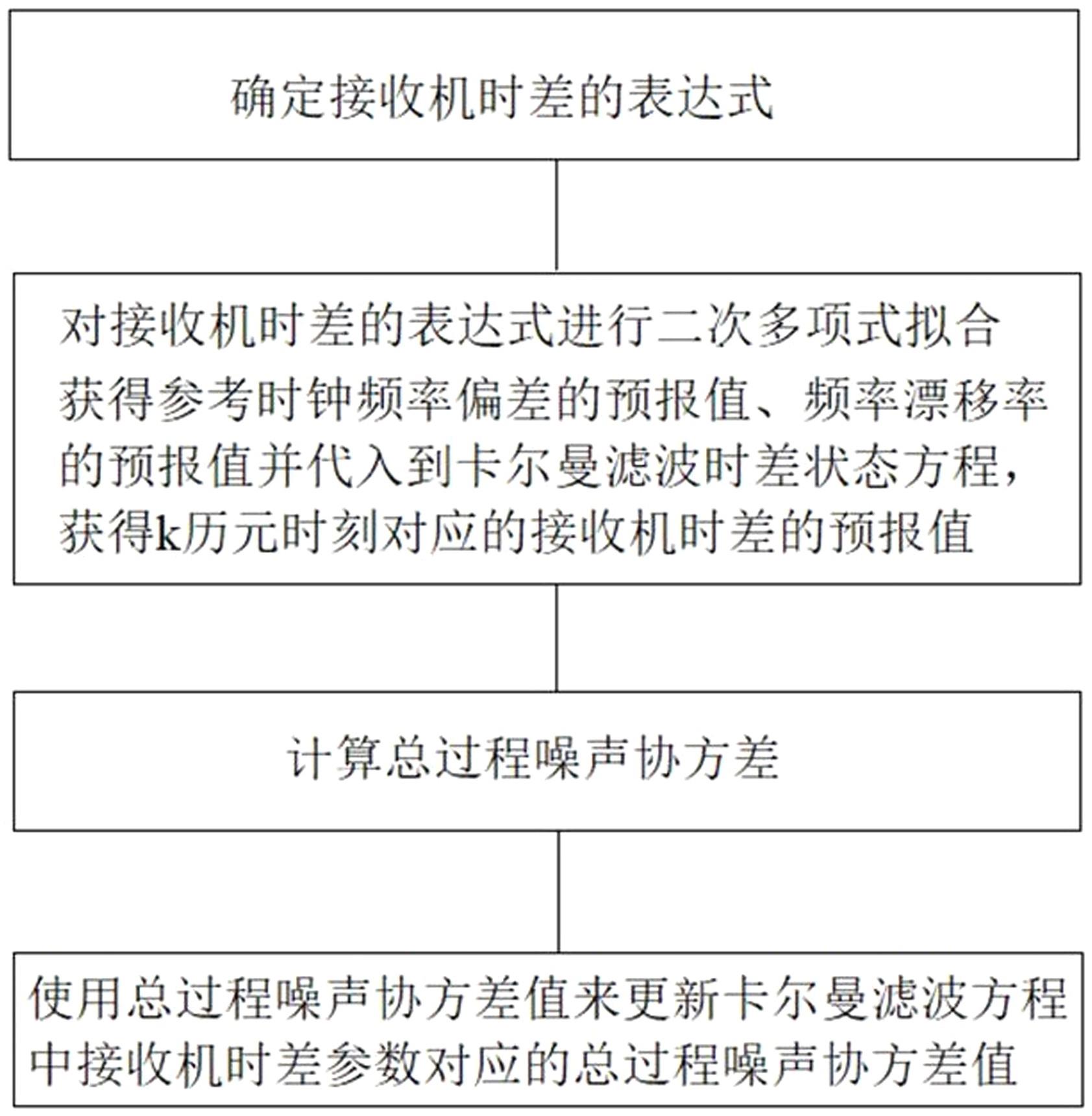
4、步骤1、确定接收机时差的表达式;
5、步骤2、对接收机时差的表达式进行二次多项式拟合,得到当前时刻t的参考时钟输出频率信号的参考时钟频率偏差的预报值和频率漂移率的预报值,将参考时钟频率偏差的预报值、频率漂移率的预报值代入到卡尔曼滤波时差解算状态方程,获得k历元时刻对应的接收机时差的预报值;
6、步骤3、计算总过程噪声协方差,
7、其中,为外部参考时钟固有频率特性引入的噪声协方差,为仅考虑时钟频率偏差的预报值和频率漂移率的预报值引入的误差的噪声协方差;
8、步骤4、使用总过程噪声协方差值来更新卡尔曼滤波方程中接收机时差参数对应的总过程噪声协方差值。
9、如上所述步骤1中接收机时差的表达式为:
10、,
11、其中,为时刻t对应的接收机时差,、和分别是接收机参考时刻对应的初始时差、参考时钟输出频率信号的参考时钟频率偏差和频率漂移率,为参考时钟的随机变化分量。
12、如上所述步骤2中二次多项式拟合包括以下步骤:利用当前时刻k的前m个历元[k-m, k]的ppp解算钟差,对接收机时差的表达式进行二次多项式拟合,得到当前时刻t的参考时钟输出频率信号的参考时钟频率偏差的预报值和频率漂移率的预报值。
13、如上所述步骤2中卡尔曼滤波时差解算状态方程为:
14、,
15、其中,为k+1历元时刻对应的接收机时差的预报值,为k历元时刻的ppp解算钟差值,为原始观测数据的采用间隔,为参考时钟频率偏差,为频率漂移率。
16、如上所述外部参考时钟固有频率特性引入的噪声协方差基于以下公式:
17、,
18、其中,为采样间隔下的修正阿伦方差,为光速,为原始观测数据的采用间隔。
19、如上所述仅考虑时钟频率偏差的预报值和频率漂移率的预报值引入的误差的噪声协方差基于以下公式:
20、,
21、其中,rmse为预报残差,m为滑动窗体长度,为k历元时刻对应的接收机时差的预报值,为接收机时差。
22、本发明相对于现有技术,具有以下有益效果:
23、1、本发明充分考虑接收机外接参考时钟输出频率信号的时变特性及其高稳定度和短时可预报的特点,采用不同外接参考时钟类型不同滑动窗体长度的滑动滤波方法拟合外接参考时钟的参考时钟频率偏差和频率漂移率;
24、2、采用误差剥离和重组方法,推导了多项式拟合得到的参考时钟频率偏差和频率漂移率引入的总过程噪声协方差计算公式;
25、3、给出了基于ppp时频传递自适应钟差模型的总过程噪声协方差计算公式;
26、4、根据滑动窗口长度m实时更新、和接收机时差的总过程噪声协方差,解决了其他时差约束模型未考虑时钟频率信号时变特性导致的过约束问题,实现了精确解算接收机时差,提高了ppp时间传递精度。
技术特征:
1.顾及时钟频率时变特性的ppp自适应钟差模型估算方法,其特征在于,包括以下步骤:
2.根据权利要求1所述顾及时钟频率时变特性的ppp自适应钟差模型估算方法,其特征在于,所述步骤1中接收机时差的表达式为:,
3.根据权利要求2所述顾及时钟频率时变特性的ppp自适应钟差模型估算方法,其特征在于,所述步骤2中二次多项式拟合包括以下步骤:利用当前时刻k的前m个历元 [k-m, k]的ppp解算钟差,对接收机时差的表达式进行二次多项式拟合,得到当前时刻t的参考时钟输出频率信号的参考时钟频率偏差的预报值和频率漂移率的预报值。
4.根据权利要求3所述顾及时钟频率时变特性的ppp自适应钟差模型估算方法,其特征在于,所述步骤2中卡尔曼滤波时差解算状态方程为:,
5.根据权利要求4所述顾及时钟频率时变特性的ppp自适应钟差模型估算方法,其特征在于,所述外部参考时钟固有频率特性引入的噪声协方差基于以下公式:
6.根据权利要求5所述顾及时钟频率时变特性的ppp自适应钟差模型估算方法,其特征在于,所述仅考虑时钟频率偏差的预报值和频率漂移率的预报值引入的误差的噪声协方差基于以下公式:
技术总结
本发明公开了顾及时钟频率时变特性的PPP自适应钟差模型估算方法,确定接收机时差的表达式并进行二次多项式拟合,得到当前时刻的参考时钟输出频率信号的参考时钟频率偏差的预报值和频率漂移率的预报值并代入卡尔曼滤波时差解算状态方程,获得k历元时刻对应的接收机时差的预报值,计算总过程噪声协方差并更新卡尔曼滤波方程中接收机时差参数对应的总过程噪声协方差值。本发明实现了精确解算接收机时差,提高了PPP时间传递精度。
技术研发人员:张杰,韩金阳,钟世明,路润明,梁子涵,催潜,邓雨晨
受保护的技术使用者:中国科学院精密测量科学与技术创新研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!