一种交通雷达检测车辆横穿方法与流程
本发明涉及交通雷达应用,特别涉及一种交通雷达检测车辆横穿方法。
背景技术:
1、随着我国汽车数量的增加,智能交通系统(intelligenttransportation system,its)应运而生,可有效缓解城市交通压力。its结合了传感器测量、信号处理、数据通讯传输与信息管理等技术来实现对整个地面交通系统进行管理的目标。它建立起一种通过对交通信息实时、准确地测量,从而对车辆行驶进行智能指挥的交通运输管理系统。
2、交通雷达在its中起着十分重要的作用。它作为its的信息来源,主要负责采集实时交通信息数据,为its的决策提供重要判断依据。交通雷达系统能够对道路上的交通信息进行全天候的检测,对车量进行分类并统计出道路上的车流量、平均车速、道路占有率等信息。
3、目前交通雷达多为调频连续波体制,工作在毫米波频段,由于毫米波雷达测速依赖于多普勒频移,并且测得的是径向速度,对于横向运动的目标,难以确定车辆真实的横向运动速度与纵向运动速度,选用扩展卡尔曼(ekf)滤波算法进行滤波估计时,得到的目标速度也不准确,无法准确估计出目标位置,因此造成目标跟踪困难,容易出现轨迹断裂,无法实现全程检测与跟踪,导致交通雷达应用在城市十字路口复杂环境时效果很差。
技术实现思路
1、为了解决上述问题,本发明提供了一种交通雷达检测车辆横穿方法,可在复杂交通路口环境下准确和稳定的检测车辆横穿轨迹。
2、为此,本发明的技术方案是:一种交通雷达检测车辆横穿方法,包括以下步骤:
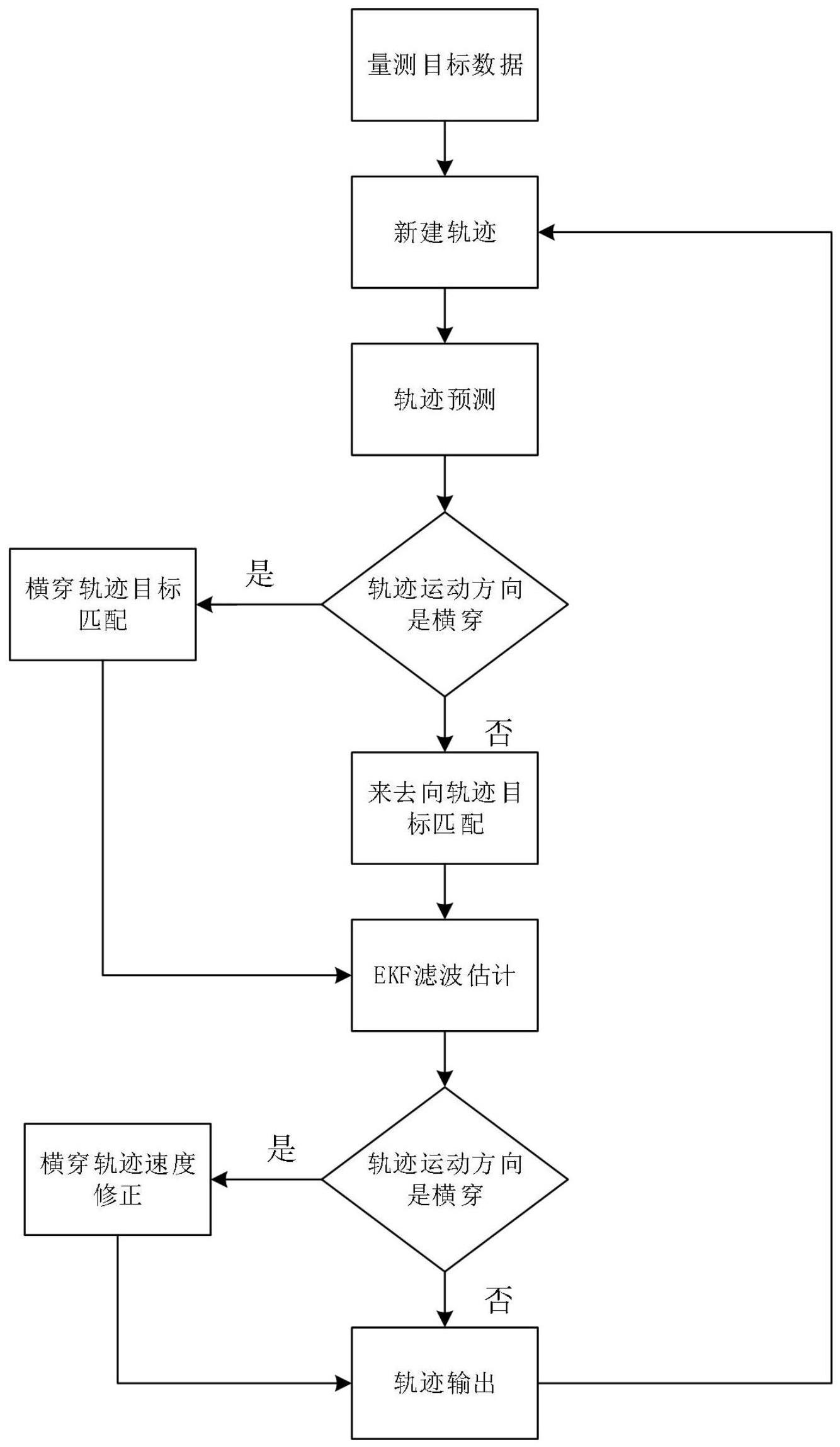
3、1)根据量测目标数据建立新轨迹并将轨迹位置预测到下一帧;
4、2)判定轨迹运动方向,当starty<stopline时,满足条件1或条件2,则判定轨迹为横穿轨迹:
5、条件1:vx>crossthreshvx,vy<crossthreshvy;
6、条件2:ax>crossthreshax,ay>crossthreshay;
7、其中:starty为轨迹起始位置的纵向坐标,
8、stopline为路口停止线到雷达的纵向距离,
9、vx为横向运动速度,vy为纵向运动速度,
10、ax为横向运动加速度,ay为纵向运动加速度,
11、crossthreshvx为横穿轨迹的横向运动速度阈值,
12、crossthreshvy为横穿轨迹的纵向运动速度阈值,
13、crossthreshax为横穿轨迹的横向运动加速度阈值,
14、crossthreshay为横穿轨迹的纵向运动加速度阈值;
15、3)根据轨迹运动方向来设置目标匹配波门,波门横向方向阈值和纵向方向阈值与车辆自身尺寸相匹配;
16、4)对匹配成功的轨迹进行ekf滤波估计,更新轨迹实时位置与速度;
17、5)轨迹位置坐标与速度经过滤波后,重复步骤2),若是横穿轨迹,则执行步骤6),否则执行步骤7);
18、6)对横穿轨迹的速度进行修正,若轨迹横向位置坐标posx与匹配成功量测目标的横向坐标measposx的差值超过阈值latmovedist,则根据轨迹与量测目标的相对位置,对该轨迹乘以修正因子modifyvx进行加速或减速修正速度;
19、7)输出轨迹信息。
20、在上述方案的基础上并作为上述方案的优选方案:所述步骤1)中,在新建轨迹时初步判断目标运动方向,然后进行轨迹预测,并将轨迹位置预测到下一帧。
21、在上述方案的基础上并作为上述方案的优选方案:所述步骤2)中,当starty>stopline时,满足条件2或条件3,则判定轨迹为横穿轨迹:
22、条件3:vx>crossthreshvx*factorvx,vy<crossthreshvy*factorvy;
23、其中,factorvx为横向速度权重因子,factorvy为纵向速度权重因子。
24、在上述方案的基础上并作为上述方案的优选方案:所述步骤3)中,横穿轨迹时,设置波门横向方向阈值assignthreshx为车辆长度大小,波门纵向方向阈值assignthreshy为车辆宽度大小;
25、非横穿轨迹则时,设置波门横向方向阈值assignthreshx为车辆宽度大小,波门纵向方向阈值assignthreshy为车辆长度大小。
26、在上述方案的基础上并作为上述方案的优选方案:所述步骤6)中,速度修正流程如下:
27、i)计算轨迹横向坐标posx与量测目标数据横向坐标measposx的差值,将其差值与轨迹横向移动距离阈值latmovedist进行比较;
28、ii)当(posx-measposx)>latmovedist时,若车辆的横向运动速度vx>1,则vx=vx/modifyvx;若-8<vx<-1,则vx=vx*modifyvx,其中modifyvx为横向速度修正因子;
29、iii)当(posx-measposx)<-latmovedist时,若车辆的横向运动速度vx<-1,则vx=vx/modifyvx;若1<vx<8,则vx=vx*modifyvx。
30、本发明在新建轨迹时进行初步判断目标运动方向,然后进行轨迹预测,将轨迹位置预测到下一帧,再进行目标匹配与ekf滤波估计,对于不同运动方向的目标执行不同的目标匹配波门,经过滤波估计后对轨迹进行后处理,进一步判断目标运动方向,对于横穿运动方向的目标,根据滤波估计后的轨迹位置与聚类后的量测目标位置进行判断是否给轨迹修正速度,以保证下一帧匹配时轨迹与量测能正确匹配,实现稳定跟踪横穿车辆。
31、与现有技术相比,本发明的有益效果是:在交通雷达检测跟踪过程中,通过对路口的横穿车辆进行更加准确和稳定地跟踪,可提升交通雷达在复杂路口中的应用效果。
技术特征:
1.一种交通雷达检测车辆横穿方法,其特征在于:包括以下步骤:
2.如权利要求1所述的一种交通雷达检测车辆横穿方法,其特征在于:所述步骤1)中,在新建轨迹时初步判断目标运动方向,然后进行轨迹预测,并将轨迹位置预测到下一帧。
3.如权利要求1所述的一种交通雷达检测车辆横穿方法,其特征在于:所述步骤2)中,当starty>stopline时,满足条件2或条件3,则判定轨迹为横穿轨迹:
4.如权利要求1所述的一种交通雷达检测车辆横穿方法,其特征在于:所述步骤3)中,横穿轨迹时,设置波门横向方向阈值assignthreshx为车辆长度大小,波门纵向方向阈值assignthreshy为车辆宽度大小;
5.如权利要求1所述的一种交通雷达检测车辆横穿方法,其特征在于:所述步骤6)中,速度修正流程如下:
技术总结
本发明公开了一种交通雷达检测车辆横穿方法在新建轨迹时进行初步判断目标运动方向,然后进行轨迹预测,将轨迹位置预测到下一帧,再进行目标匹配与EKF滤波估计,对于不同运动方向的目标执行不同的目标匹配波门,经过滤波估计后对轨迹进行后处理,进一步判断目标运动方向,对于横穿运动方向的目标,根据滤波估计后的轨迹位置与聚类后的量测目标位置进行判断是否给轨迹修正速度,以保证下一帧匹配时轨迹与量测能正确匹配,对路口的横穿车辆进行更加准确和稳定地跟踪,可提升交通雷达在复杂路口中的应用效果。
技术研发人员:饶鼎,李俊,赵宇,李妞妞,张悦,柏宇豪
受保护的技术使用者:北京川速微波科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!