一种实孔径雷达自适应组合正则化角超分辨成像方法
本发明属于雷达成像,具体涉及一种实孔径雷达自适应组合正则化角超分辨成像方法。
背景技术:
1、实孔径雷达的角分辨率与天线孔径相关。在实际应用中由于雷达平台空间限制,孔径尺寸有限,导致实孔径雷达角分辨率低,难以满足飞行器自主着陆、地形测绘等领域高分辨率成像的应用需求。
2、正则化方法是提升实孔径雷达角分辨率的一种有效途径。文献“y.zhao,j.g.liu,b.zhang,w.hong,and y.-r.wu,‘adaptive total variation regularization based sarimage despeckling and despeckling evaluation index,’ieee transactions ongeoscience and remote sensing,2014,pp.2765-2774.”提出了一种基于全变差范数的边缘增强方法,但是单一正则化项的重建性能有限。文献“w.huo,x.tuo,y.zhang,y.zhang,and y.huang,‘balanced tikhonov and total variation deconvolution approach forradar forward-looking super-resolution imaging,’ieee geoscience and remotesensing let-ters,2021,pp.1-5.”提出了一种具有包含l2范数和tv范数的组合正则化方法,可以同时平滑噪声信息并增强目标的边缘信息。文献“q.zhang,y.zhang,y.huang,y.zhang,j.pei,q.yi,w.li,and j.yang,‘tv-sparse super-resolution method forradar forward-looking imaging,’ieee transactions on geoscience and remotesensing,vol.58,no.9,pp.6534-6549,2020”把l1范数和tv范数被作为组合约束项以增强目标的分辨率和边缘信息,但是随着正则化项的数量增加,正则化参数的选取复杂。
3、综上,虽然上述提到的方法都能在一定程度上改善实孔径雷达角分辨率。但是,单一正则化方法性能改善有限,而现有组合正则化方法在求解过程中面临复杂的参数选取,不利于实际应用。
技术实现思路
1、为解决上述技术问题,本发明提出了一种实孔径雷达自适应组合正则化角超分辨成像方法,以实现扩展目标的尺度信息重建,通过选择广义稀疏范数和广义全变差范数作为组合范数,同时增强角度分辨率和扩展目标边缘信息,然后提出了基于数据相关拟合准则的迭代重加权方法,实现了正则化参数自适应快速选取。
2、本发明的技术方案为:一种实孔径雷达自适应组合正则化角超分辨成像方法,具体步骤如下:
3、步骤一、回波数据的获取与预处理;
4、根据机载实孔径雷达的运动几何模型,雷达通过发射线性调频信号获取目标场景ω的信息,经过解调后,目标场景的回波可表示为:
5、
6、其中,τ表示距离向时间采样向量,t表示方位向时间采样向量,观测场景ω的方位采样点数为n,距离向采样点数为m;σ(x,y)表示场景ω中(x,y)点的目标散射系数,w(t)表示天线方向图函数调制,rect(·)表示矩形窗函数,tp表示发射信号的脉冲时宽,λ表示载频波长,c表示电磁波传播速度,k表示线性调频率,n(τ,t)表示加性高斯白噪声。目标的距离历史为r0表示目标起始距离,v表示机载平台运动速度,θ0表示目标空间方位角。
7、对回波进行脉冲压缩和距离走动校正,实现距离向的高分辨处理,目标场景的方位向回波可以转化为形式:
8、y=hx+n (2)
9、其中,y表示接收的方位向回波向量,h表示由天线方向图函数构成的卷积测量矩阵,x表示目标散射系数分布,n表示噪声向量。
10、步骤二、构建正则化目标函数;
11、在正则化框架下,选择广义稀疏范数和广义全变差范数作为组合范数构建目标函数,目标函数表达式为:
12、
13、其中,表示恢复的目标散射系数分布,表示数据表征项,表示向量二范数的平方;η1和η2表示正则化参数;表示广义稀疏范数,表示广义全变差范数,d表示梯度矩阵,p和q分别表示广义稀疏范数和广义全变差范数的范数值。
14、步骤三、计算归一化加权矩阵;
15、根据协方差拟合准则,式(3)中的正则化参数η1和η2可通过加权矩阵代替,表达式如下:
16、
17、其中,w表示加权矩阵,归一化表示为:
18、w=diag(ω1,ω2,…,ωn) (5)
19、其中,diag(·)表示对角矩阵,且an表示卷积测量矩阵h=[a1,…,an,…an]的第n列,n表示方位采样点数。
20、步骤四、迭代初始化;
21、目标散射系数的初始值为:
22、
23、其中,t表示矩阵的转置。
24、步骤五、更新权重因子;
25、wp和wq分别表示p范数和q范数的正则化权重矩阵,分别更新为如下形式:
26、
27、
28、其中,表示第i-1次迭代中第n个目标散射系数元素的绝对值的p-2次方;表示第i-1次迭代中第n个目标散射系数元素的绝对值的q-2次方。
29、步骤六、更新目标散射系数;
30、根据步骤五中的正则化权重矩阵,目标散射系数的更新迭代公式为:
31、
32、重复步骤五和步骤六,经过i次迭代后,直至相邻两次的超分辨结果的误差不大于设定的误差值χ,循环结束。循环终止条件为:
33、
34、循环遍历回波矩阵的所有距离单元,得到对整个回波矩阵的方位超分辨成像结果。
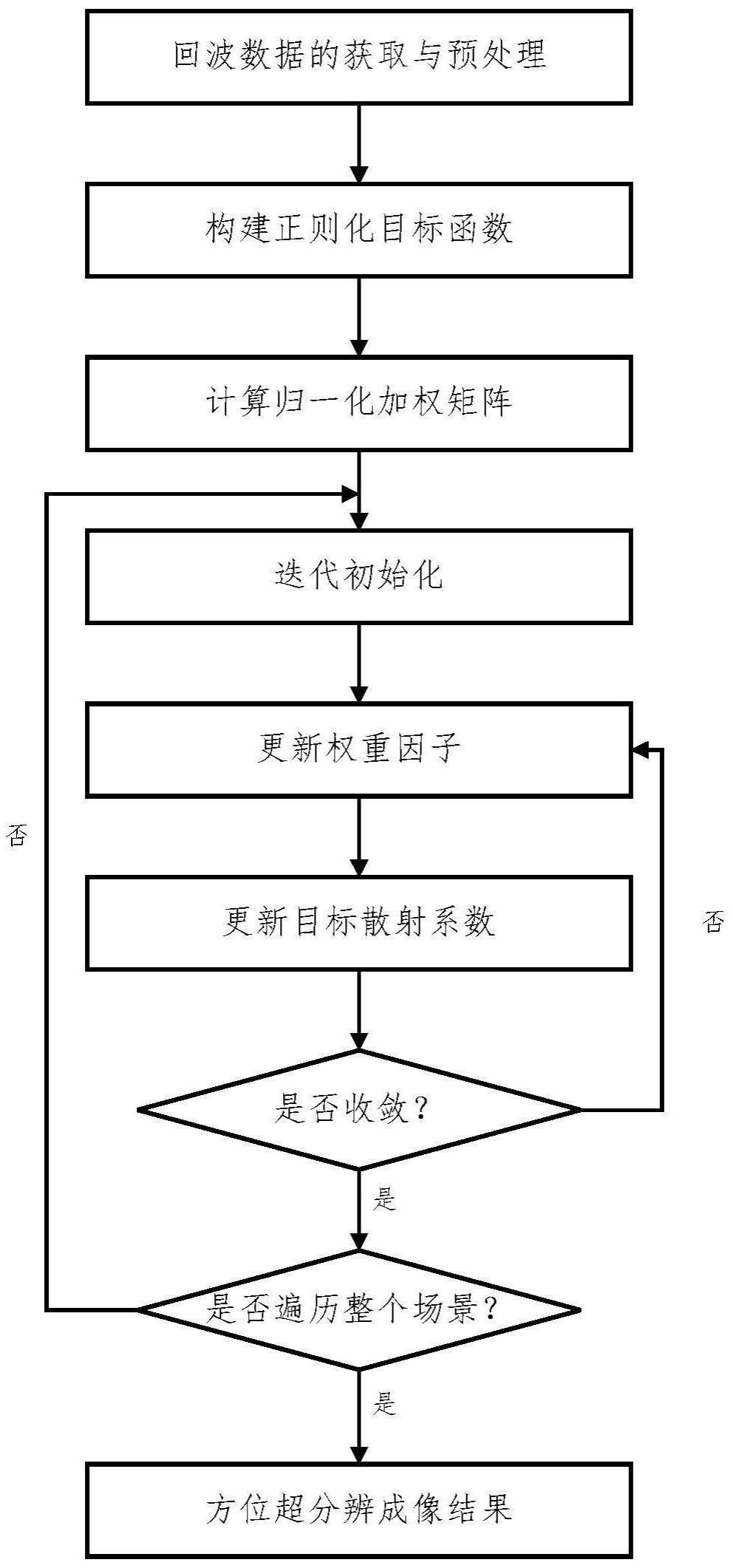
35、本发明的有益效果:本发明的方法首先进行回波数据的获取与预处理,构建正则化目标函数,再通过计算归一化加权矩阵,并进行迭代初始化,更新权重因子,最后更新目标散射系数,得到对整个回波矩阵的方位超分辨成像结果。本发明的方法组合了广义稀疏范数和广义全变差范数作为约束项,同时增强角度分辨率和扩展目标边缘信息,然后采用基于数据驱动的迭代重加权方法,避免了正则化参数的选取,减少了手动选择参数的数量,相比现有组合范数方法,具有更强的尺度信息重建能力,提高了实孔径雷达对扩展目标的尺度重建准确性。
技术特征:
1.一种实孔径雷达自适应组合正则化角超分辨成像方法,具体步骤如下:
技术总结
本发明公开了一种实孔径雷达自适应组合正则化角超分辨成像方法,首先进行回波数据的获取与预处理,构建正则化目标函数,再通过计算归一化加权矩阵,并进行迭代初始化,更新权重因子,最后更新目标散射系数,得到对整个回波矩阵的方位超分辨成像结果。本发明的方法组合了广义稀疏范数和广义全变差范数作为约束项,同时增强角度分辨率和扩展目标边缘信息,然后采用基于数据驱动的迭代重加权方法,避免了正则化参数的选取,减少了手动选择参数的数量,相比现有组合范数方法,具有更强的尺度信息重建能力,提高了实孔径雷达对扩展目标的尺度重建准确性。
技术研发人员:毛德庆,黄钰林,庹兴宇,赵献,罗嘉伟,张永超,张寅,杨建宇,杨海光
受保护的技术使用者:电子科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!