双面MEMSIMUs单轴旋转调制方法
本发明涉及智能系统导航及测量领域,尤其涉及一种双面mems imus单轴旋转调制方法。
背景技术:
1、
2、 惯性微系统(micro inertial measurement unit,mems imu)具有体积小、成本低、功耗低等特点,被广泛应用于智能手机、移动穿戴设备、机器人等相关领域。但受到惯性器件制造工艺的影响,低精度mems imu的误差会随时间发生快速发散。
3、为了提高mems imu的精度,目前主要有两种手段,一种是从改良与设计硬件的角度,例如通过改良工艺与引进新材料来提高单个mems imu精度,但是这种方法周期长、投入大。通过在一个硬制电路板上设计和排列多个低精度的mems imu阵列,然后基于测量平差理论进行数据融合,不仅能够提高测量精度,而且还能防止单个mems imu故障导致系统不可用的问题。然而,阵列mems imu的精度提升以牺牲单个mems imu超小型的优势为代价,若仅排列两个mems imu,其占用面积也至少要增加3倍(还需增加布线空间与电容空间)。因此,阵列mems imu在智能手机、移动穿戴设备等小型电子产品领域的应用大大受到限制。
4、旋转调制技术是一种从算法角度提升mems imu精度的重要手段,通过将imu固连在旋转机构上,采用设定的旋转方案绕着某一轴或者多个轴周期性地旋转以抵消常值误差,从而提高测量精度。旋转调制系统有单轴、双轴和三轴等类型,其中单轴系统操作最简单、稳定性最好。但是,单轴系统存在旋转轴方向误差无法调制的问题。
5、经检索,国家知识产权局公布的较为接近的如下专利文献,cn105277213a、cn102620734a、cn110501028a、cn114061572a和cn111397635a中,都没有解决和克服上述问题。
技术实现思路
1、
2、本发明的目的在于克服上述现有技术中的缺陷和/或不足,从而提供一种双面mems imus单轴旋转调制方法。
3、本发明采用如下技术方案:
4、一种双面mems imus单轴旋转调制方法,包括以下步骤:
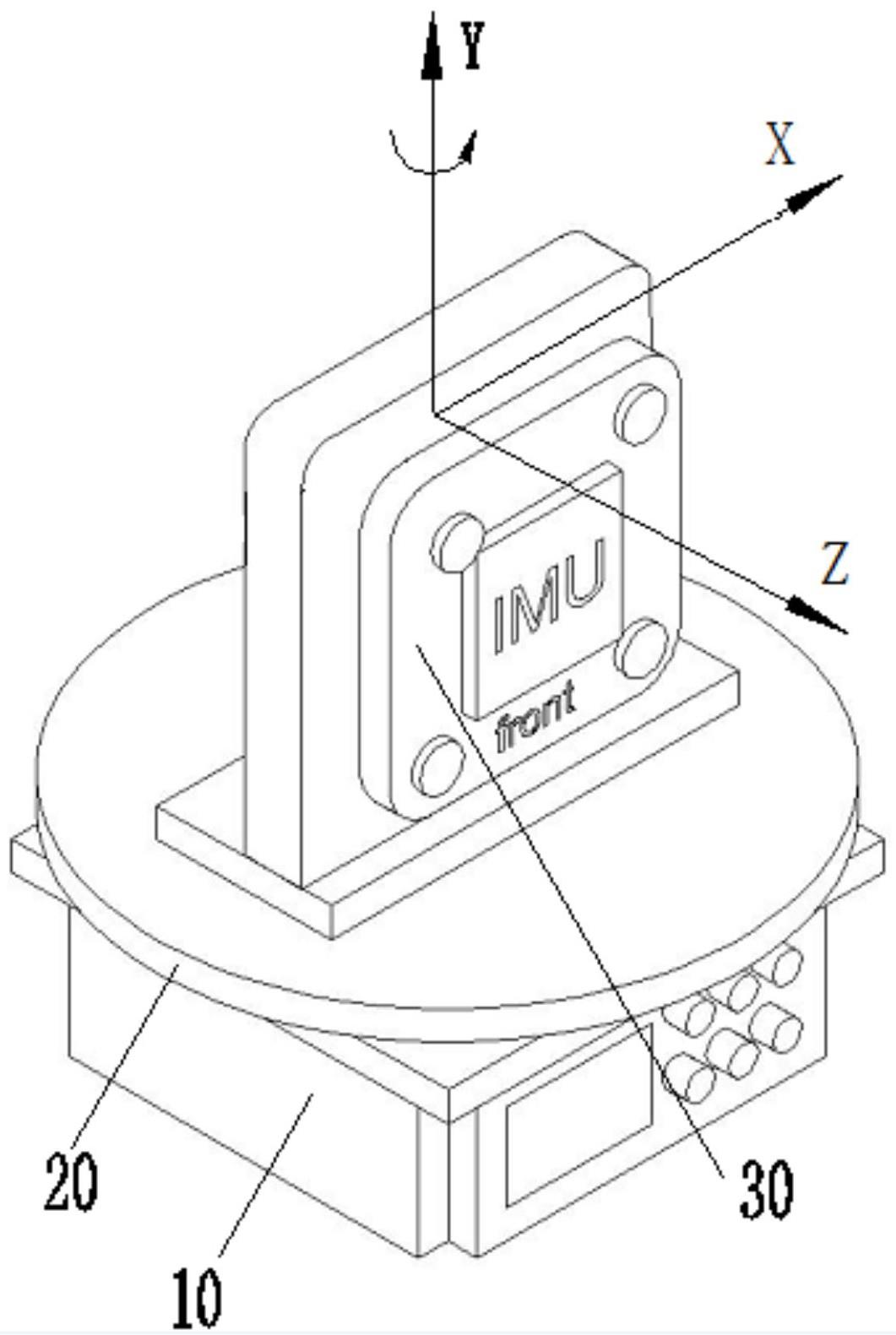
5、1)使用两个精度相同的imu构建1个imu阵列,两个imu分别贴置于板卡的正面与反面;mems imus坐标系定义如下:为右手坐标系,正面x轴朝右,y轴向上,z轴指向板卡外部;反面y轴朝左,x轴向上,z轴指向板卡外部;正面x轴与反面imu y轴重合;
6、2)载体坐标系和平台坐标系的定义如下:定义系与mems imus固连,三个轴的方向与双面mems imus的正面imu的三轴敏感轴重合;定义系与电机固连,旋转时与载体系在平面上的夹角定义为旋转机构的旋转角度;
7、3)单轴旋转调制系统中,双面mems imus与转台固连,转台与下方的电机连接,并采取绕平台坐标系y轴正反180°的旋转方案:即正面mems imu绕自身y轴旋转,反面memsimu绕自身x轴旋转,旋转角度为;
8、4)旋转方案如下:① imus以位置a为起点,逆时针旋转180°至位置b,并停止t秒;② imus从位置b出发顺时针旋转180°至位置a,并停止t秒;③ imus从位置a出发顺时针旋转180°至位置b,停止t秒;④ imus从位置b出发逆时针旋转180°至位置a,停止t秒;
9、 5)平台坐标系下的陀螺和加速度计量测模型如下:
10、 ,
11、和分别为系下陀螺仪和加速度计的测量值,和分别为陀螺仪和加速度计的比例因子误差矩阵,和分别为陀螺仪和加速度计的理想输出值,和分别为陀螺和加速度计的零偏,和分别为陀螺和加速度计的测量噪声,为单位矩阵;
12、表示系到系下的转换矩阵,表示如下:式中,为mems imus的旋转角;
13、
14、6)为构建双面mems imus误差模型,将正面mems imu测量模型与反面mems imu测量模型相减,得到双面mems imus误差模型,正面与反面分别用数字1和2表示;
15、
16、
17、式中,和分别表示陀螺仪误差和加速度计误差。
18、本发明与现有技术相比,本发明综合利用了硬件优化设计与单轴旋转调制技术两种手段,采用双面mems imu的硬件设计方法(两个mems imu反面相粘合),无需印制电路板。正面imu的x轴与反面imu的y轴重合,在旋转调制时可以互相调制旋转轴方向误差。不仅可以缩减mems imus的占用空间,而且避免了单轴旋转调制技术在旋转轴方向上误差无法被调制的弊端,从而提高了mems imu测量精度。
19、本发明采用如下优选方案:
20、使用两个精度相同的imu构建1个imu阵列,并且两个imu的外型结构也完全相同。
21、平台坐标系与正面y轴坐标系重合。
技术特征:
1. 一种双面mems imus单轴旋转调制方法,包括以下步骤:
2.根据权利要求1所述的双面mems imus单轴旋转调制方法,其特征在于:使用两个精度相同的imu构建1个imu阵列,并且两个imu的外型结构也完全相同。
3.根据权利要求1所述的双面mems imus单轴旋转调制方法,其特征在于:平台坐标系与正面y轴坐标系重合。
技术总结
本发明涉及智能系统导航及测量领域,尤其涉及双面MEMS IMUs单轴旋转调制方法。使用两个精度相同的IMU构建1个IMU阵列,正面X轴朝右,Y轴向上;反面Y轴朝左,X轴向上;采取绕平台坐标系Y轴正反180°的旋转方案;构建双面MEMS IMU误差模型,正面MEMS IMU测量模型与反面MEMS IMU测量模型相减,得到误差模型,正面与反面分别用数字1和2表示;采用双面MEMS IMU的硬件设计方法,正面IMU的X轴与反面IMU的Y轴重合,旋转调制时互相调制旋转轴方向误差。缩减MEMS IMUs占用空间,避免了单轴旋转调制技术在旋转轴方向上误差无法被调制的弊端,提高了MEMS IMU测量精度。
技术研发人员:王柯南,刘鑫明,金永超
受保护的技术使用者:华北理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!