基于数字光栅的三维位移测量系统的制作方法
本发明涉及基于数字光栅的三维位移测量系统,属于半导体集成电路制造。
背景技术:
1、随着超大规模集成电路的关键尺寸不断缩小,对集成电路制造带来了极大的挑战,制造芯片最关键的工艺,也是最核心的技术便是光刻技术。由于光刻精度和产能的不断提高,对晶圆台的定位精度与速度提出了更高更严格的要求。晶圆台的定位精度通过一个反馈控制系统来保证。一个六维位移测量系统测量晶圆台的当前位置,并将该位置信息传输到一个反馈控制装置。该装置根据当前位置与理想位置的偏差进行调整,使得晶圆台在理想位置附近。可见,位移测量系统在光刻机中非常重要,它的测量精度是保证晶圆台定位精度的前提条件。在光刻技术中,六自由度位移测量本质由多个x、y、z三维位移测量系统实现。
2、先进光刻机中的三维位移测量系统主要分两种:激光干涉式测量系统和光栅式测量系统。激光干涉式测量系统基于激光干涉效应,广泛应用于极紫外(euv)光刻机和各种深紫外(duv)光刻机中。该干涉仪的测量精度取决于激光波长,当环境中温湿度、气压以及气流发生变化的时候误差会增大,并且环境导致的误差通常为非线性误差,很难通过后期的测量手段消除,因此在先进节点的浸没式duv光刻机中大多采用另一种测量系统:光栅式位移测量系统。光栅式测量系统以光栅的栅距作为测量基准,同时测量设备与待测物体之间的距离大幅缩短,极大程度降低了对于环境的依赖性,但是在实现高精度测量时成本增加。
3、综上所述,现有的光刻机位移测量系统至少还存在以下缺点:(1)激光干涉仪用于光刻机中三维位移测量系统时,受环境扰动的影响大,存在后期无法消除的非线性误差,不适合用于先进浸没式光刻机中;(2)光栅式测量系统使用成本高,扩展自由度复杂,需要变动其光学结构。
技术实现思路
1、本发明利用了ccd或cmos相机本身像素点均匀排列的性质,提出了一种数字二维光栅结构,这种数字二维光栅是将相机的等间距行、列模拟成透光区域和不透光区域,与光学二维光栅在相机表面所成的像进行叠栅形成可用于测量的莫尔条纹图像,再分别寻找行、列中光强相等的周期作为对准点,以此计算出两个方向的位移信息,利用此叠栅结构进行图像处理,生成一个莫尔条纹信号曲线,跟踪该曲线的对准点可以实现长行程的测量。此外,结合光学三角法或其他光学原理,此叠栅结构也可用于z向的长行程测量。
2、具体技术方案如下:
3、本发明的第一个目的在于提供一种三维位移测量系统,包括:xy方向测量机构、z方向测量机构和工控机;
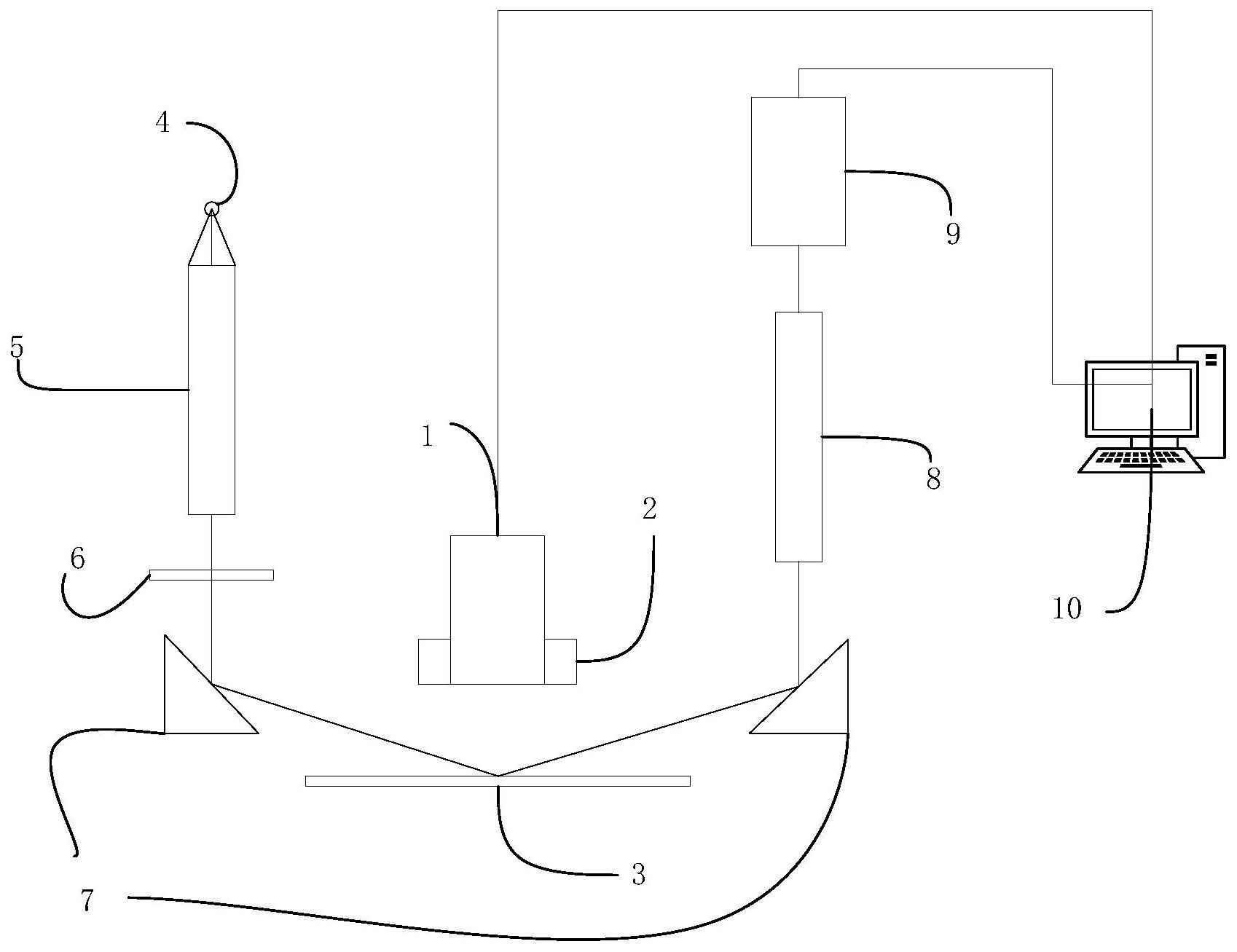
4、所述xy方向测量机构包括:第一相机、第一光源和反射式二维光栅;所述反射式二维光栅放置于待测物体表面,所述第一光源发出光照在所述反射式二维光栅表面后,形成周期性的反射光在所述第一相机镜头上成像,所述第一相机将图像数据传输给所述工控机进行图像处理;
5、所述z方向测量机构包括:第二光源、投影物镜、透射光栅、反射镜组件、探测镜筒、第二相机;所述第二光源发出的光经过所述投影物镜后为远心光束,周期性地通过所述透射光栅,经过所述反射镜组件和待测物体的反射后,通过所述探测镜筒,成像在所述第二相机上,所述第二相机将采集的图像数据传输给所述工控机进行图像处理。
6、可选的,所述透射光栅为振幅型一维光栅。
7、可选的,所述反射镜组件包括:第一反射镜和第二反射镜,分别位于所述待测物体的两边,高于所述待测物体上表面且高度相同,反射面相对。
8、本发明的第二个目的在于提供一种三维位移测量方法,基于上述任一项所述的三维位移测量系统实现,所述工控机收集相机采集的物理光栅图像,并与自身按照相似周期形成的数字光栅发生叠栅效应,形成可以用于测量的信号,通过对测量信号的计算得到数字光栅周期,所述待测样品发生位移时,所述工控机通过所述数字光栅周期的变化计算得到x、y、z三个方向的位移,所述数字光栅周期与位置之间的对应关系通过前期标定获得;
9、所述数字光栅周期的计算方法包括:
10、将一张图像按照相机像素分为若干个相等且互相独立的明区和暗区,并从图像的上方到下方依次编号,分别计算每个编号区域内明区和暗区的光强累加值并记录,若存在某个编号内,明区光强的累加值等于暗区光强的累加值,则称这个编号的值为对准点。
11、可选的,所述数字光栅周期的计算方法还包括:
12、记录每个数字光栅区域内的明区光强和暗区光强,计算其差值,作为每个数字光栅区域的光强差分值,这样光强差分值为0的编号区域则为对准点,若实际不存在正好为0的点,则采用多项式函数拟合,找到函数零点位置,将零点位置的横坐标记为对准点。
13、可选的,所述方法采用增量式测量方法实现长行程位移测量,所述增量式测量方法包括:
14、通过选择适合的系统使每个维度数字光栅中都至少存在两个及以上的对准点,增量式测量方法通过当前时刻测量的对准点和上一时刻记录的对准点做差,判断上一时刻哪些对准点消失,并跟踪未消失的对准点来更新位移信息,每次完成测量之后记录所有对准点及位置信息,完成对位置信息和对准点信息的迭代,以此实现长行程位移测量。
15、本发明的第三个目的在于提供一种xy方向位移测量方法,利用上述任一项所述的三维位移测量方法实现xy方向位移的测量。
16、本发明的第四个目的在于提供一种高度位移测量方法,利用上述任一项所述的三维位移测量方法实现z方向位移的测量。
17、本发明有益效果是:
18、本发明利用了ccd或cmos相机本身像素点均匀排列的性质,提出了一种数字二维光栅结构,不仅具有光栅式测量系统的抗环境干扰优点,并相较于基于衍射原理的光栅式测量系统成本更低,灵活度更高,并且测量精度与相机放大倍率相关,从而能实现高精度高速度的位移测量,对提高集成电路制造设备有着积极的影响。
19、此外,本发明的三维测量系统的光学部分不再基于干涉与衍射原理,更多通过反射式结合图像处理学算法,使整体光路结构简洁,而对测量数据的后续处理多体现于优异的算法设计,所以在实现多维度测量的时候无需更改光学结构,不仅可以降低测量成本,且整体使用简单高效。
技术特征:
1.一种三维位移测量系统,其特征在于,所述三维位移测量系统包括:xy方向测量机构、z方向测量机构和工控机;
2.根据权利要求1所述的三维位移测量系统,其特征在于,所述透射光栅为振幅型一维光栅。
3.根据权利要求1所述的三维位移测量系统,其特征在于,所述反射镜组件包括:第一反射镜和第二反射镜,分别位于所述待测物体的两边,高于所述待测物体上表面且高度相同,反射面相对。
4.一种三维位移测量方法,其特征在于,所述测量方法基于权利要求1-3任一项所述的三维位移测量系统实现,所述工控机收集相机采集的物理光栅图像,并与自身按照相似周期形成的数字光栅发生叠栅效应,形成可以用于测量的信号,通过对测量信号的计算得到数字光栅周期,所述待测样品发生位移时,所述工控机通过所述数字光栅周期的变化计算得到x、y、z三个方向的位移,所述数字光栅周期与位置之间的对应关系通过前期标定获得;
5.根据权利要求4所述的三维位移测量方法,其特征在于,所述数字光栅周期的计算方法还包括:
6.根据权利要求5所述的三维位移测量方法,其特征在于,所述方法采用增量式测量方法实现长行程位移测量,所述增量式测量方法包括:
7.一种xy方向位移测量方法,其特征在于,利用权利要求4-6任一项所述的三维位移测量方法实现xy方向位移的测量。
8.一种高度位移测量方法,其特征在于,利用权利要求4-6任一项所述的三维位移测量方法实现z方向位移的测量。
技术总结
本发明公开了基于数字光栅的三维位移测量系统,属于半导体集成电路制造技术领域。所述三维位移测量系统包括:XY方向测量机构、Z方向测量机构和工控机。本发明利用了相机像素点均匀排列的性质,提出了一种数字光栅结构,这种数字光栅是将相机的等间距行或列模拟成透光区域和不透光区域,与光学一维或二维光栅在相机表面所成的像进行叠栅形成可用于测量的莫尔条纹图像,再分别寻找行、列中光强相等的周期作为对准点,以此计算出三维位移信息;本发明不仅具有光栅式测量系统的抗环境干扰优点,且成本更低,灵活度更高,整体使用简单高效,能实现高精度高速度的位移测量,对提高集成电路制造设备有着积极的影响。
技术研发人员:李世光,戢逸云,王寅,曾海峰
受保护的技术使用者:李世光
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!