雷达防串扰方法、装置、激光雷达及存储介质与流程
本发明涉及雷达,具体而言,涉及一种雷达防串扰方法、装置、激光雷达及存储介质。
背景技术:
1、车载激光雷达以其超高的距离分辨和空间分辨能力,被认为是自动驾驶的感知阶段最关键的组成部件。测距范围、空间分辨率、点频是激光雷达最主要的性能指标。其中,点频是激光雷达每秒输出的数据像素点的个数,点频越高,三维成像像素越高,对目标物的成像质量越精细。
2、为了提高点频,激光雷达通常会采用多组光束同时发光并探测的方案。但是,由于障碍物目标会对激光进行漫反射,同时发光的不同通道之间的反射光线会存在干扰,导致某一通道收到了另一通道的反射光,就会形成通道串扰。而且,激光雷达内部的处理模块的通道之间也会因为相互隔离不足或空间辐射产生通道串扰。通道串扰会导致对目标物的探测效率降低,产生目标物漏检、数据点缺失的情况,也会导致点云有鬼影、产生虚假目标点的情况,这些都会导致激光雷达的点云可靠性降低,从而限制激光雷达的应用。
3、在现有技术中,通常通过在点云中筛选并删除错误数据点以消除串扰,但是这一方式实质上是对已经获得的点云数据进行二次处理,以减小串扰造成的误差,并不能在工作时就减少各通道之间的串扰。
技术实现思路
1、为了解决上述技术问题,本申请实施例提供了一种雷达防串扰方法、装置、激光雷达及存储介质。
2、第一方面,本申请实施例提供了一种雷达防串扰方法,应用于激光雷达,所述激光雷达包括预设探测通道组,预设探测通道组包括多个探测通道,所述方法包括:
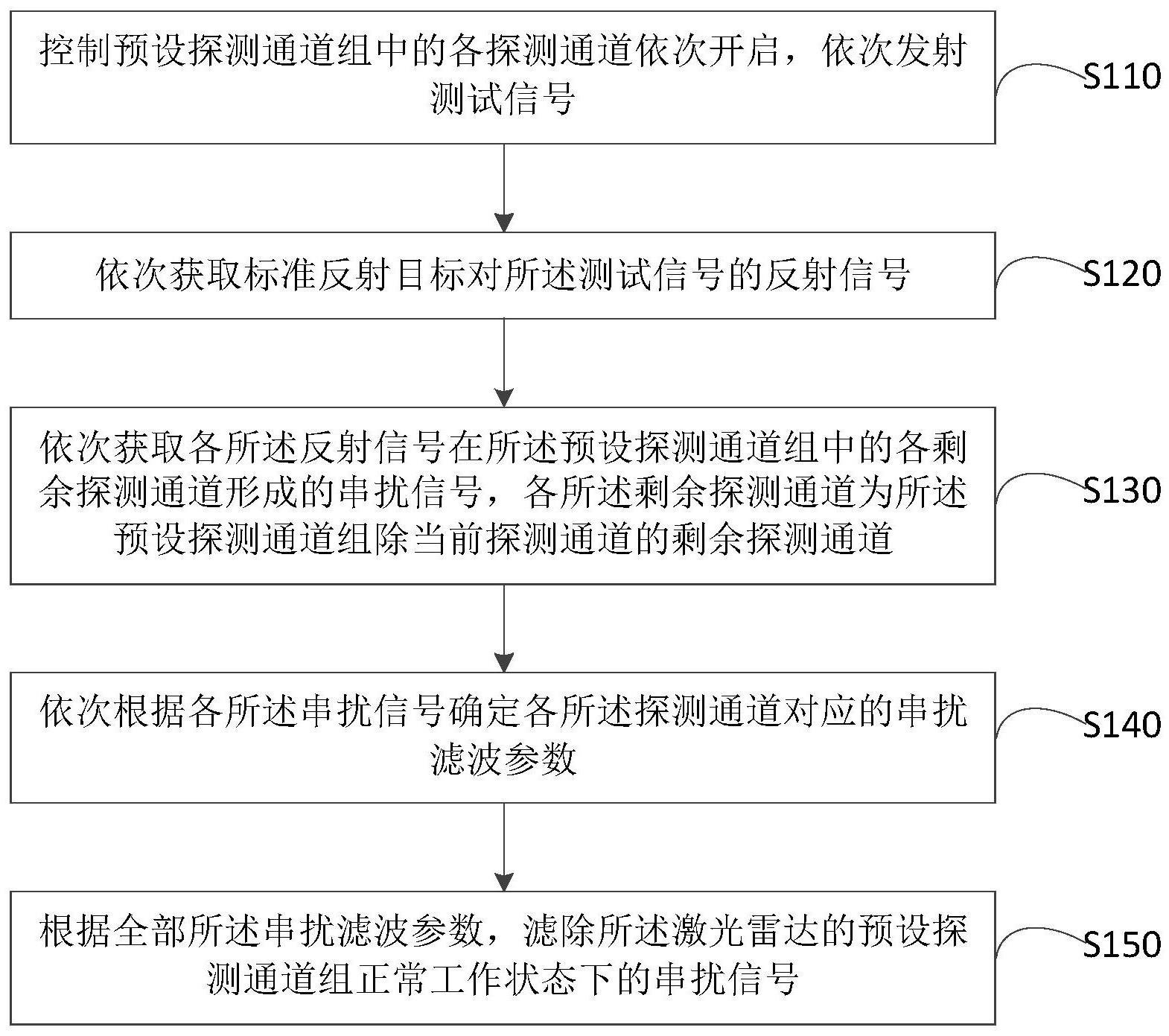
3、控制预设探测通道组中的各探测通道依次开启,依次发射测试信号;
4、依次获取标准反射目标对所述测试信号的反射信号;
5、依次获取各所述反射信号在所述预设探测通道组中的各剩余探测通道形成的串扰信号,各所述剩余探测通道为所述预设探测通道组除当前探测通道的剩余探测通道;
6、依次根据各所述串扰信号确定各所述探测通道对应的串扰滤波参数;
7、根据全部所述串扰滤波参数,滤除所述激光雷达的预设探测通道组正常工作状态下的串扰信号。
8、在一实施方式中,所述控制预设探测通道组中的各探测通道依次开启之前,包括:
9、控制所述预设探测通道组中的全部探测通道关闭,直至全部所述探测通道中不存在激光信号。
10、在一实施方式中,所述根据各所述串扰信号确定各所述探测通道对应的串扰滤波参数,包括:
11、判断所述串扰信号是否大于有效信号阈值;
12、若所述串扰信号小于所述有效信号阈值,则对所述串扰滤波参数赋值为0;
13、若所述串扰信号大于或等于所述有效信号阈值,则根据测试滤波函数对所述串扰滤波参数赋值。
14、在一实施方式中,所述测试滤波函数为:
15、
16、其中,xm1(t)表示第m个剩余探测通道tdm相对于当前探测通道td1的串扰滤波参数,rm表示第m个剩余探测通道tdm接收的串扰信号的脉冲峰值幅度,s1表示当前探测通道td1发射的测试信号的脉冲峰值幅度,δ(t)表示单位冲激函数,t0表示第m个剩余探测通道tdm接收串扰信号和当前探测通道td1发射测试信号的脉冲时间差。
17、在一实施方式中,所述方法还包括:
18、根据串扰延时值和串扰比例值确定所述串扰滤波参数。
19、在一实施方式中,所述根据全部所述串扰滤波参数,滤除所述激光雷达的预设探测通道组正常工作状态下的串扰信号,包括:
20、在所述激光雷达正常工作状态下,获取所述预设探测通道组的当前工作通道和剩余工作通道;
21、获取各所述剩余工作通道的接收信号;
22、将各所述剩余工作通道的接收信号与各所述剩余工作通道对应的串扰滤波参数进行卷积运算,得到各所述剩余工作通道对应的卷积运算结果;
23、将全部所述卷积运算结果进行求和,得到所述当前工作通道对应的串扰信号;
24、滤除所述串扰信号。
25、第二方面,本申请实施例提供了一种雷达防串扰装置,应用于激光雷达,所述激光雷达包括预设探测通道组,预设探测通道组包括多个探测通道,所述装置包括:
26、发射模块,用于控制预设探测通道组中的各探测通道依次开启,依次发射测试信号;
27、第一获取模块,用于依次获取标准反射目标对所述测试信号的反射信号;
28、第二获取模块,用于依次获取各所述反射信号在所述预设探测通道组中的各剩余探测通道形成的串扰信号,各所述剩余探测通道为所述预设探测通道组除当前探测通道的剩余探测通道;
29、确定模块,用于依次根据各所述串扰信号确定各所述探测通道对应的串扰滤波参数;
30、滤波模块,用于根据全部所述串扰滤波参数,滤除所述激光雷达的预设探测通道组正常工作状态下的串扰信号。
31、在一实施方式中,所述确定模块还用于:
32、判断所述串扰信号是否大于有效信号阈值;
33、若所述串扰信号小于所述有效信号阈值,则对所述串扰滤波参数赋值为0;
34、若所述串扰信号大于或等于所述有效信号阈值,则根据测试滤波函数对所述串扰滤波参数赋值。
35、第三方面,本申请实施例提供了一种激光雷达,包括存储器以及处理器,所述存储器用于存储计算机程序,所述计算机程序在所述处理器运行时执行第一方面提供的雷达防串扰方法。
36、第四方面,本申请实施例提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序在处理器上运行时执行第一方面提供的雷达防串扰方法。
37、上述本申请提供的雷达防串扰方法,通过标定的方式,以标准反射目标为参照目标来获取各个探测通道串扰的特性,可以方便准确地获取该通道对其他通道的串扰滤波参数,然后利用各探测通道的串扰滤波参数对激光雷达的接收信号做处理,从源头上改善了通道串扰对输出的点云数据的影响,增加了激光雷达的可靠性。
技术特征:
1.一种雷达防串扰方法,其特征在于,应用于激光雷达,所述激光雷达包括预设探测通道组,预设探测通道组包括多个探测通道,所述方法包括:
2.根据权利要求1所述的雷达防串扰方法,其特征在于,所述控制预设探测通道组中的各探测通道依次开启之前,包括:
3.根据权利要求1所述的雷达防串扰方法,其特征在于,所述根据各所述串扰信号确定各所述探测通道对应的串扰滤波参数,包括:
4.根据权利要求3所述的雷达防串扰方法,其特征在于,所述测试滤波函数为:
5.根据权利要求3所述的雷达防串扰方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的雷达防串扰方法,其特征在于,所述根据全部所述串扰滤波参数,滤除所述激光雷达的预设探测通道组正常工作状态下的串扰信号,包括:
7.一种雷达防串扰装置,其特征在于,应用于激光雷达,所述激光雷达包括预设探测通道组,预设探测通道组包括多个探测通道,所述装置包括:
8.根据权利要求7所述的雷达防串扰装置,其特征在于,所述确定模块还用于:
9.一种激光雷达,其特征在于,包括存储器以及处理器,所述存储器存储有计算机程序,所述计算机程序在所述处理器运行时执行权利要求1至6中任一项所述的雷达防串扰方法。
10.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序在处理器上运行时执行权利要求1至6中任一项所述的雷达防串扰方法。
技术总结
本发明的实施例提供了一种雷达防串扰方法、装置、激光雷达及存储介质,涉及雷达技术领域。包括:控制预设探测通道组中的各探测通道依次开启,依次发射测试信号;依次获取标准反射目标对所述测试信号的反射信号;依次获取各所述反射信号在所述预设探测通道组中的各剩余探测通道形成的串扰信号,各所述剩余探测通道为所述预设探测通道组除当前探测通道的剩余探测通道;依次根据各所述串扰信号确定各所述探测通道对应的串扰滤波参数;根据全部所述串扰滤波参数,滤除所述激光雷达的预设探测通道组正常工作状态下的串扰信号。本实施例从源头上减少了探测通道之间的串扰,改善了通道串扰对输出的点云数据的影响,增加了激光雷达的可靠性。
技术研发人员:陈浩,严伟振
受保护的技术使用者:宁波未感半导体科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!