用于无模糊的距离变化率估计的信号建模的制作方法
背景技术:
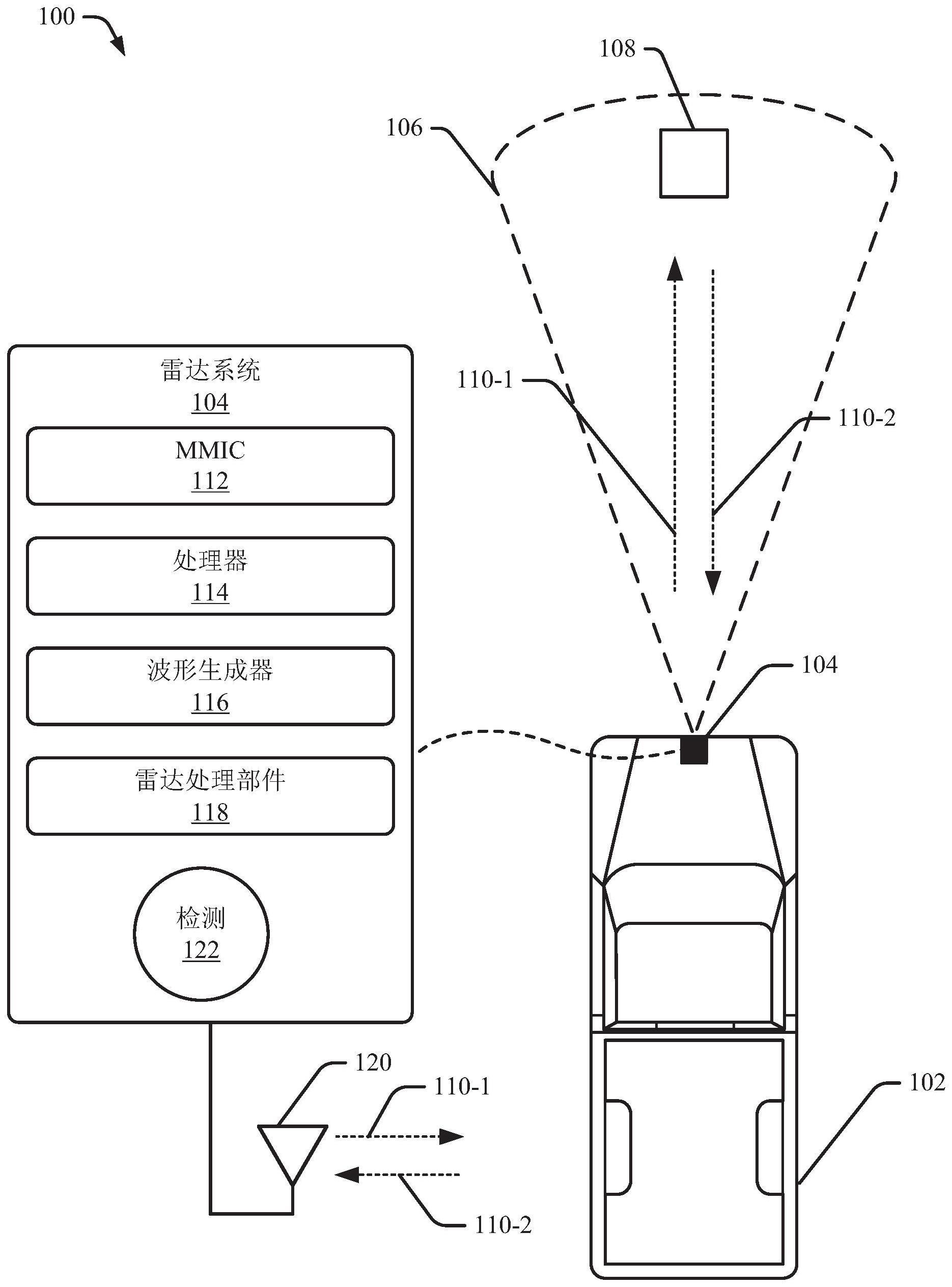
1、雷达系统在交通工具(vehicle)中用作感知系统,例如,以实现自主控制或高级安全功能。雷达信号从此类系统的视场中的对象反射,并且反射被处理成关于对象的相对位置和移动的有用信息。许多常见的驾驶环境包括许多以不同的距离、方向和速度移动的不同的对象。在这种环境中导出的距离变化率估计通常会出现模糊;估计的距离变化率可能由于折叠(folding)而报告得过低。去混叠技术可以用于消除模糊;然而,去混叠跨多个帧工作,这会引入延迟并降低性能。雷达系统需要能够快速处理许多关键交通工具系统的返回;交通工具功能取决于即时和精确的对象报告;如果雷达检测及其距离变化率估计延迟时间过长,则可能会发生不安全和/或不舒适的交通工具操纵。
技术实现思路
1、本文档描述了用于无模糊的距离变化率估计的信号建模。本
技术实现要素:
并非旨在标识出要求保护的主题的必要特征,也并非旨在用于确定要求保护的主题的范围。
2、在一个示例中,系统包括处理器,处理器被配置成用于:通过将两个不同组的啁啾交织成有序的啁啾序列,使得每个连续的啁啾对包括来自两组中的一组的初始啁啾和来自两组中的另一组的后续啁啾,来从雷达系统发射用于帧的雷达信号。处理器可以基于响应于雷达信号的发射而获得的雷达回波,标识两组中的每一组的初始距离和多普勒测量。基于该组的初始距离和多普勒测量,处理器被配置成用于从用于无模糊地估计检测的距离变化率的多个模糊项中为两组中的每一组选择模糊项。两组中的每一组的模糊项是独立进行选择的。处理器可以使用为两组选择的模糊项来估计与两组中的任一组相关联的检测的无模糊的距离变化率。
3、除了此示例和其他示例之外,还描述了用于无模糊的距离变化率估计的信号建模的方法。在一些情况下,计算机可读介质(crm)包括指令,该指令在被执行时,将(例如,雷达系统的)处理器配置成用于执行这些方法。本公开还构想了包括用于执行这些方法的各种装置的系统。通过实现本公开构想的这些和其他示例,可以实现用于无模糊的距离变化率估计的信号建模,从而即使在拥挤的驾驶情况下也能做出安全和准确的驾驶决策。
技术特征:
1.一种方法,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述两组中的一组包括在发射期间频率增加的向上啁啾,并且所述两组中的另一组包括在发射期间频率降低的向下啁啾。
3.如权利要求2所述的方法,其特征在于:
4.如权利要求1所述的方法,其特征在于,所述帧包括向上帧,所述向上帧在所述帧的发射期间将所述有序啁啾序列在频率上偏移得更高。
5.如权利要求1所述的方法,其特征在于,所述帧包括向下帧,所述向下帧在所述帧的发射期间将所述有序啁啾序列在频率上偏移得更低。
6.如权利要求1所述的方法,其特征在于,所述多个模糊项包括至少一个大于零或小于零的整数。
7.如权利要求1所述的方法,其特征在于,为所述两组中的每一组选择所述模糊项包括:
8.如权利要求1所述的方法,其特征在于,为所述两组中的每一组选择所述模糊项包括:
9.如权利要求8所述的方法,进一步包括:
10.如权利要求9所述的方法,其特征在于,所选择的所述第一模糊项或所选择的所述第二模糊项中的至少一个不为零。
11.如权利要求1所述的方法,进一步包括:
12.一种计算机可读存储介质,所述计算机可读存储介质包括指令,所述指令在被执行时,使处理器用于:
13.一种系统,所述系统包括处理器,所述处理器被配置成用于:
14.如权利要求13所述的系统,其特征在于,所述两组中的一组包括在发射期间频率增加的向上啁啾,并且所述两组中的另一组包括在发射期间频率降低的向下啁啾。
15.如权利要求14所述的系统,其中:
16.如权利要求13所述的系统,其特征在于,所述处理器被进一步配置成用于:
17.如权利要求13所述的系统,其特征在于,所述处理器被进一步配置成用于通过以下方式为所述两组中的每一组选择所述模糊项:
18.如权利要求17所述的系统,其特征在于,所述处理器被进一步配置成用于:
19.如权利要求18所述的系统,其特征在于,所选择的所述第一模糊项或所选择的所述第二模糊项中的至少一个不为零。
20.如权利要求13所述的系统,其特征在于,所述处理器被进一步配置成用于:
技术总结
本文档描述了用于无模糊的距离变化率估计的交织啁啾。信号模型快速且无模糊地估计一帧内的任何啁啾的距离变化率。在每个帧期间,雷达信号的发射是通过在有序序列中交织两个不同组的啁啾(例如,向上啁啾和向下啁啾)而引起的。这种独特的啁啾模式使信号模型能够计算每个帧的模糊项(例如,每个组的模糊变量)。模糊项通常不为零。在考虑帧的模糊的情况下,可以无模糊地提供距离变化率估计。当应用于估计距离变化率的方案时,模糊项允许为任何可能的检测获得快速且无模糊的结果。不需要分析多个帧即可解决模糊。准确度和性能的这一提高使雷达能够得到更广泛的采用,并可以促进安全驾驶。
技术研发人员:高博奕
受保护的技术使用者:安波福技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!