座舱域获取车辆定位绝对坐标方法、系统、介质及设备与流程
本发明涉及智驾域与座舱域相互交互,特别涉及一种座舱域获取车辆定位绝对坐标方法、系统、介质及设备。
背景技术:
1、座舱域主要是用于渲染车道级导航信息、人机交互。智驾域主要是用于辅助智能驾驶的具体指令控制车辆。座舱域的渲染引擎渲染车道级导航时需要渲染出车辆的具体位置,渲染的车道级导航的地图数据为加偏的经纬度绝对坐标,这就要求智驾域输入的车辆定位信息为经纬度绝对坐标,而智驾域传入到座舱域的定位信息是用于在地图上显示自车的位置,因此就需要智驾域输入的定位信息与地图数据坐标系保持一致。当智驾域在发送车辆所在位置信息,按照国测局规定,不同的域之间是不能直接发送绝对坐标涉及到信息安全问题,直接发送经纬度的绝对坐标是不合法规的,这就导致了自车收不到绝对坐标就无法在地图上显示自车实时位置,但是自车的位置信息又只能从智驾域传输至座舱域的。
2、因此,需提供一种方案来解决智驾域不能向座舱域发送经纬度绝对坐标,从而导致座舱域渲染引擎无法渲染车辆的位置来与地图数据进行匹配的问题。
技术实现思路
1、本发明的提供一种座舱域获取车辆定位绝对坐标方法、系统、介质及设备,解决了车辆在辅助智能驾驶中,智驾域与座舱域交互不能发送车辆定位的绝对坐标,座舱域渲染的车道级导航无法显示车辆实时位置的问题。
2、第一方面,提供一种座舱域获取车辆定位绝对坐标方法包括以下步骤:
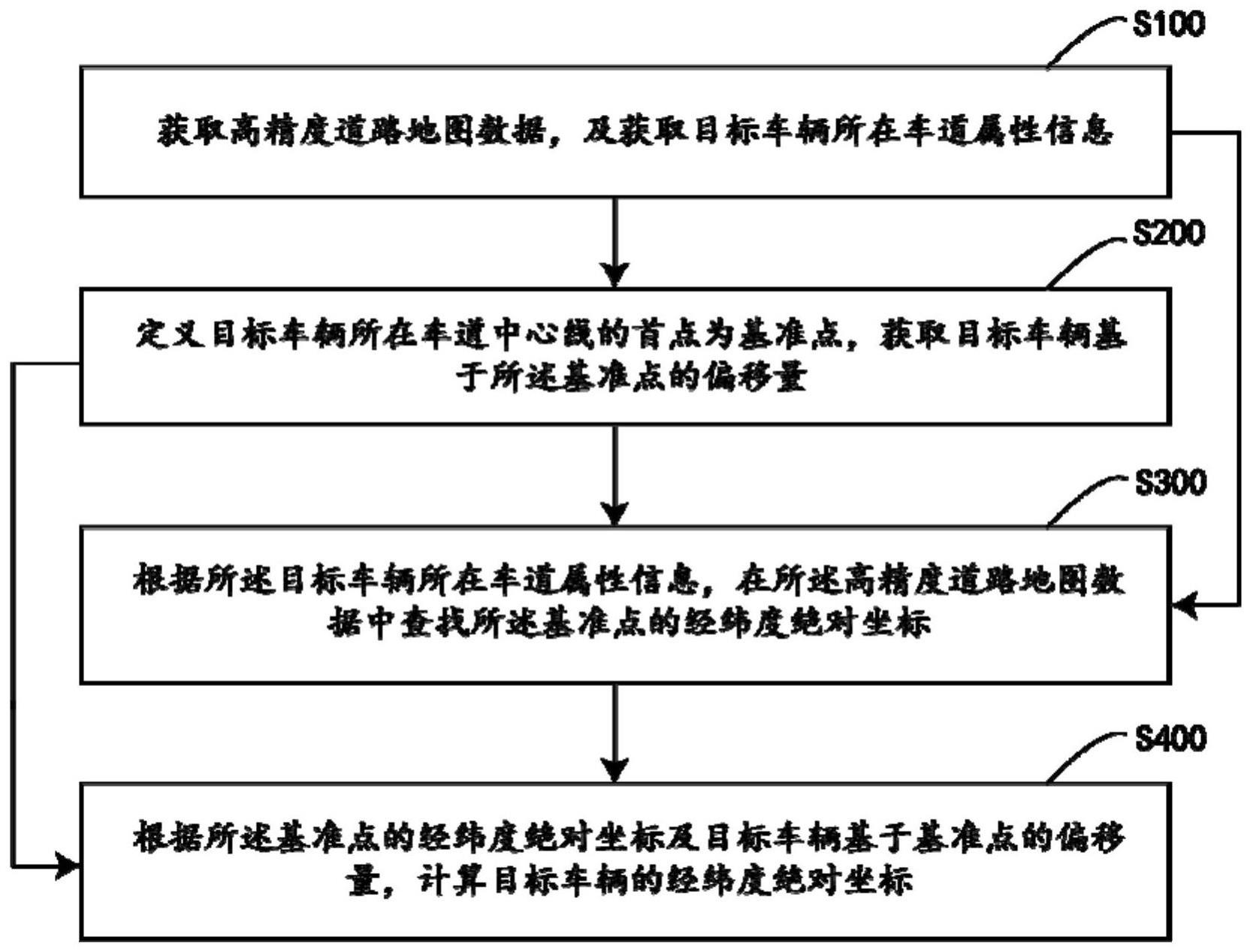
3、获取高精度道路地图数据,及获取目标车辆所在车道属性信息;
4、定义目标车辆所在车道中心线的首点为基准点,获取目标车辆基于所述基准点的偏移量;
5、根据所述目标车辆所在车道属性信息,在所述高精度道路地图数据中查找所述基准点的经纬度绝对坐标;
6、根据所述基准点的经纬度绝对坐标及目标车辆基于基准点的偏移量,计算目标车辆的经纬度绝对坐标。
7、根据第一方面,在第一方面的第一种可能的实现方式中,所述“根据所述基准点的经纬度绝对坐标及目标车辆基于基准点的偏移量,计算目标车辆的经纬度绝对坐标”步骤,具体包括以下步骤:
8、根据所述基准点的经纬度绝对坐标及目标车辆基于基准点的偏移量,计算目标车辆的ecef坐标;
9、根据所述目标车辆的ecef坐标,计算目标车辆的经纬度绝对坐标。
10、根据第一方面的第一种可能的实现方式,在第一方面的第二种可能的实现方式中,所述“根据所述基准点的经纬度绝对坐标及目标车辆基于基准点的偏移量,计算目标车辆的ecef坐标”步骤,具体包括以下步骤:
11、根据所述基准点的经纬度绝对坐标(longti,lati),及目标车辆基于基准点的偏移量(dx,dy,dz);
12、计算目标车辆的ecef坐标(x,y,z)如下:
13、
14、式中,dz=0。
15、根据第一方面的第一种可能的实现方式,在第一方面的第三种可能的实现方式中,所述“根据所述目标车辆的ecef坐标,计算目标车辆的经纬度绝对坐标”步骤,具体包括以下步骤:
16、根据所述目标车辆的ecef坐标(x,y,z);
17、计算目标车辆的经纬度绝对坐标(lon,lat,alt)如下:
18、
19、
20、其中,
21、
22、式中,alt=0;e为偏心率;n为基准椭球体的曲率半径。
23、根据第一方面,在第一方面的第四种可能的实现方式中,所述“获取高精度道路地图数据”步骤之后,具体包括以下步骤:
24、将所述高精度道路地图数据转换为nds数据,并将所述nds数据渲染成车道级导航地图数据;
25、将所述目标车辆的经纬度绝对坐标渲染至车道级导航地图数据上。
26、第二方面,提供了一种座舱域获取车辆定位绝对坐标系统,包括:
27、数据获取模块,用于获取高精度道路地图数据,及获取目标车辆所在车道属性信息;
28、车辆偏移模块,与所述数据获取模块通信连接,用于定义目标车辆所在车道中心线的首点为基准点,获取目标车辆基于所述基准点的偏移量;
29、基准点绝对坐标模块,与所述数据获取模块及所述车辆偏移模块通信连接,用于根据所述目标车辆所在车道属性信息,在所述高精度道路地图数据中查找所述基准点的经纬度绝对坐标;
30、车辆绝对坐标模块,与所述车辆偏移模块及所述基准点绝对坐标模块通信连接,用于根据所述基准点的经纬度绝对坐标及目标车辆基于基准点的偏移量,计算目标车辆的经纬度绝对坐标。
31、第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上述所述的座舱域获取车辆定位绝对坐标方法。
32、第四方面,提供了一种电子设备,包括存储介质、处理器以及存储在所述存储介质中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器运行所述计算机程序时实现如上述所述的座舱域获取车辆定位绝对坐标方法。
33、与现有技术相比,本发明的优点如下:座舱域与智驾域使用同一份高精度地图数据,数据i d属性信息保持相同,当目标车辆在行驶过程或者停止中,智驾域将车辆所在的车道id属性信息和偏移量输入给到座舱域,座舱域就可以通过车道id查到基准点的经纬度绝对坐标,此基准点通常是为车辆当前所在车道中心线数据形点的首点作为基准点。有了基准点,在通过偏移量反算出车辆所在位置的绝对坐标,这样就可以获取到车辆的定位与地图引擎数据保持在同一坐标系,并与渲染引擎的高精度数据的渲染匹配起来。因此,本发明解决了车辆在辅助智能驾驶中,智驾域与座舱域交互不能发送车辆定位的绝对坐标,座舱域渲染的车道级导航无法显示车辆实时位置的问题。
技术特征:
1.一种座舱域获取车辆定位绝对坐标方法,其特征在于,包括以下步骤:
2.如权利要求1所述的座舱域获取车辆定位绝对坐标方法,其特征在于,所述“根据所述基准点的经纬度绝对坐标及目标车辆基于基准点的偏移量,计算目标车辆的经纬度绝对坐标”步骤,具体包括以下步骤:
3.如权利要求2所述的座舱域获取车辆定位绝对坐标方法,其特征在于,所述“根据所述基准点的经纬度绝对坐标及目标车辆基于基准点的偏移量,计算目标车辆的ecef坐标”步骤,具体包括以下步骤:
4.如权利要求2所述的座舱域获取车辆定位绝对坐标方法,其特征在于,所述“根据所述目标车辆的ecef坐标,计算目标车辆的经纬度绝对坐标”步骤,具体包括以下步骤:
5.如权利要求1所述的座舱域获取车辆定位绝对坐标方法,其特征在于,所述“获取高精度道路地图数据”步骤之后,具体包括以下步骤:
6.一种座舱域获取车辆定位绝对坐标系统,其特征在于,包括:
7.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至5中任一项所述的座舱域获取车辆定位绝对坐标方法。
8.一种电子设备,包括存储介质、处理器以及存储在所述存储介质中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器运行所述计算机程序时实现如权利要求1至5中任一项所述的座舱域获取车辆定位绝对坐标方法。
技术总结
本发明公开了一种座舱域获取车辆定位绝对坐标方法、系统、介质及设备,其方法包括以下步骤:获取高精度道路地图数据,及获取目标车辆所在车道属性信息;定义目标车辆所在车道中心线的首点为基准点,获取目标车辆基于所述基准点的偏移量;根据所述目标车辆所在车道属性信息,在所述高精度道路地图数据中查找所述基准点的经纬度绝对坐标;根据所述基准点的经纬度绝对坐标及目标车辆基于基准点的偏移量,计算目标车辆的经纬度绝对坐标;解决了车辆在辅助智能驾驶中,智驾域与座舱域交互不能发送车辆定位的绝对坐标,座舱域渲染的车道级导航无法显示车辆实时位置的问题。
技术研发人员:孙攀,万木春,张志军
受保护的技术使用者:武汉中海庭数据技术有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!