一种立面目标智能检测方法、系统及可读存储介质与流程
本申请涉及建筑立面测量,具体而言,涉及一种立面目标智能检测方法、系统及可读存储介质。
背景技术:
1、随着三维激光扫描技术的快速发展,激光扫描技术以其具有非接触测量、数据采样率高、高精度、高分辨率、全景化扫描等特点,在工程测量、文物保护、数字城市等多个领域得到了广泛的应用。目前,已有研究人员将其用于建筑立面测量领域,具体会通过获取反映建筑场景的全景化点云数据,并将其加载到cad软件中人为进行立面绘图,以达到减少外业测绘时间,提高工作效率的效果。然而,由于人为主观因素的干扰,以及海量的点云数据同时也带来了庞大的工作量,若仍基于人机交互的方式进行测绘制图以及人为识别立面目标,会使得在影响立面成像效果的同时,降低立面目标检测精度,最终在无法满足建筑立面快速测绘制图的应用需求的情况下,影响技术发展。
技术实现思路
1、本申请实施例的目的在基于提供一种立面目标智能检测方法、系统及可读存储介质,能够提高立面目标检测精度果。
2、本申请实施例还提供了一种立面目标智能检测方法,所述方法包括:
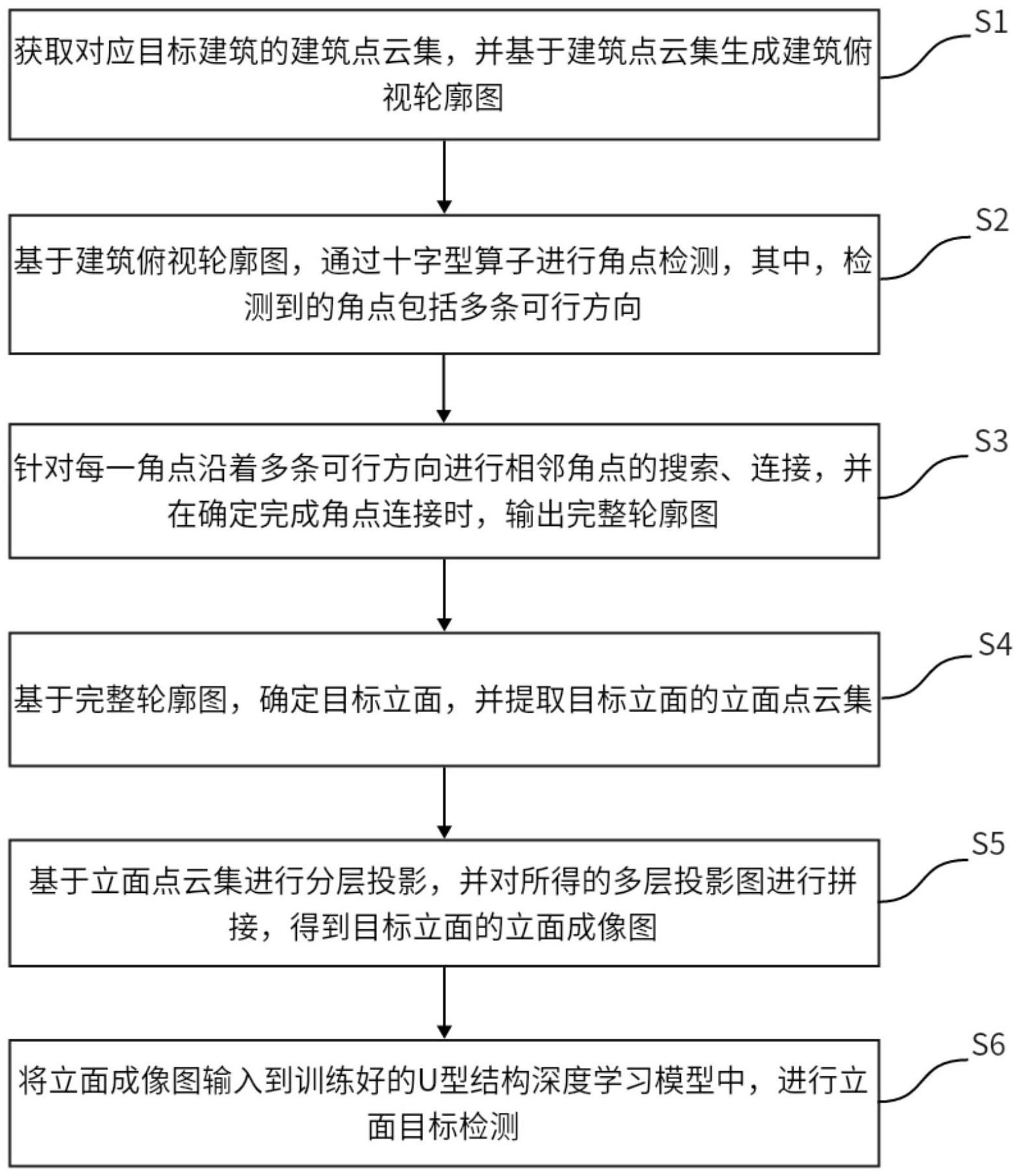
3、s1、获取对应目标建筑的建筑点云集,并基于所述建筑点云集生成建筑俯视轮廓图;
4、s2、基于所述建筑俯视轮廓图,通过十字型算子进行角点检测,其中,检测到的角点包括多条可行方向;
5、s3、针对每一角点沿着所述多条可行方向进行相邻角点的搜索、连接,并在确定完成角点连接时,输出完整轮廓图;
6、s4、基于完整轮廓图,确定目标立面,并提取所述目标立面的立面点云集;
7、s5、基于所述立面点云集进行分层投影,并对所得的多层投影图进行拼接,得到所述目标立面的立面成像图;
8、s6、将所述立面成像图输入到训练好的u型结构深度学习模型中,进行立面目标检测。
9、本申请还提供了一种立面目标智能检测系统,所述系统包括俯视轮廓处理模块、立面划分模块、立面成像模块以及立面目标检测模块,其中:
10、所述俯视轮廓处理模块,用于获取对应目标建筑的建筑点云集,并基于所述建筑点云集生成建筑俯视轮廓图;
11、所述俯视轮廓处理模块,还用于基于所述建筑俯视轮廓图,通过十字型算子进行角点检测,其中,检测到的角点包括多条可行方向;
12、所述俯视轮廓处理模块,还用于针对每一角点沿着所述多条可行方向进行相邻角点的搜索、连接,并在确定完成角点连接时,输出完整轮廓图;
13、所述立面划分模块,用于基于完整轮廓图,确定目标立面,并提取所述目标立面的立面点云集;
14、所述立面成像模块,用于基于所述立面点云集进行分层投影,并对所得的多层投影图进行拼接,得到所述目标立面的立面成像图;
15、所述立面目标检测模块,用于将所述立面成像图输入到训练好的u型结构深度学习模型中,进行立面目标检测。
16、第三方面,本申请实施例还提供了一种可读存储介质,所述可读存储介质中包括立面目标智能检测方法程序,所述立面目标智能检测方法程序被处理器执行时,实现如上述任一项所述的一种立面目标智能检测方法的步骤。
17、由上可知,本申请实施例提供的一种立面目标智能检测方法、系统及可读存储介质,获取对应目标建筑的建筑点云集,并基于所述建筑点云集生成建筑俯视轮廓图;基于所述建筑俯视轮廓图,通过十字型算子进行角点检测,其中,检测到的角点包括多条可行方向;针对每一角点沿着所述多条可行方向进行相邻角点的搜索、连接,并在确定完成角点连接时,输出完整轮廓图;基于完整轮廓图,确定目标立面,并提取所述目标立面的立面点云集;基于所述立面点云集进行分层投影,并对所得的多层投影图进行拼接,得到所述目标立面的立面成像图;将所述立面成像图输入到训练好的u型结构深度学习模型中,进行立面目标检测。当前一方面通过通过十字型算子进行角点检测,能够从图中识别到断点和拐点,之后,通过角点连接即可得到较为细致的轮廓图,为后续确定目标立面以及提高目标检测进度提供良好的数据基础。另一方面,通过分层投影的方式能进一步地保证三维物体内部信息的获取,为后续的立面成像提供了保障,提高了立面成像效果。
18、本申请的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请实施例了解。本申请的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种立面目标智能检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述建筑俯视轮廓图中包括多条骨架线,且各所述骨架线均由多个骨架点构成;步骤s2中,所述基于所述建筑俯视轮廓图,通过十字型算子进行角点检测,包括
3.根据权利要求2所述的方法,其特征在于,在执行步骤s3之前,所述方法还包括使用非极大值抑制算法,进行角点筛选,其中会:
4.根据权利要求2所述的方法,其特征在于,步骤s3中,所述针对每一角点沿着所述多条可行方向进行相邻角点的搜索、连接,包括:
5.根据权利要求1所述的方法,其特征在于,步骤s5中,所述基于所述立面点云集进行分层投影,并对所得的多层投影图进行拼接,得到所述目标立面的立面成像图,包括:
6.根据权利要求5所述的方法,其特征在于,步骤s52中,所述针对每个建筑分层,基于关联到的投影分辨率进行点云投影,得到相应的目标分层投影图,包括:
7.根据权利要求1所述的方法,其特征在于,步骤s6中,立面目标检测的过程中,所述方法包括:
8.根据权利要求7所述的方法,其特征在于,步骤s64中,生成相应的目标检测框的过程中,所述方法包括:
9.一种立面目标智能检测系统,其特征在于,所述系统包括俯视轮廓处理模块、立面划分模块、立面成像模块以及立面目标检测模块,其中:
10.一种可读存储介质,其特征在于,所述可读存储介质中包括立面目标智能检测方法程序,所述立面目标智能检测方法程序被处理器执行时,实现如权利要求1至8中任一项所述的方法的步骤。
技术总结
本申请实施例提供的一种立面目标智能检测方法、系统及可读存储介质,所述方法包括:获取对应目标建筑的建筑点云集,并基于建筑点云集生成建筑俯视轮廓图;基于建筑俯视轮廓图,通过十字型算子进行角点检测,其中,检测到的角点包括多条可行方向;针对每一角点沿着多条可行方向进行相邻角点的搜索、连接,并在确定完成角点连接时,输出完整轮廓图;基于完整轮廓图,确定目标立面,并提取目标立面的立面点云集;基于立面点云集进行分层投影,并对所得的多层投影图进行拼接,得到目标立面的立面成像图;将立面成像图输入到训练好的U型结构深度学习模型中,进行立面目标检测。该方法的实施能够提高立面目标检测精度。
技术研发人员:陈磊,李斌,王艳,谭蔚,罗益君,李成建,王杰,钟小军,程曦,范斌,向前龙,吕颖,匡江霞,刘贝贝,徐飞跃
受保护的技术使用者:武汉纵横天地空间信息技术有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!