一种联合北斗二号和北斗三号的三频差分定位方法与流程
本发明属于卫星导航定位,具体涉及一种联合北斗二号和北斗三号的三频差分定位方法。
背景技术:
1、目前,北斗二号提供b1i、b2i和b3i三个公开服务信号,北斗三号提供b1i、b1c、b2a、b2b和b3i五个公开服务信号。三频信号组合观测具有长波长、弱电离层延迟、观测噪声小等特点,有利于模糊度的准确快速固定,提升卫星导航差分定位精度。北斗三号五个频点信号为三频信号组合提供更多的组合选择,再结合已有的北斗二号的三频信号,为提高导航定位的精度带来了更优选择的可能性,但也带来了可选组合模式过多、计算量大、计算模型复杂等问题。此外,针对单卫星系统进行差分定位,当同步观测卫星颗数少时,观测模型冗余不足,导致固定率降低。
技术实现思路
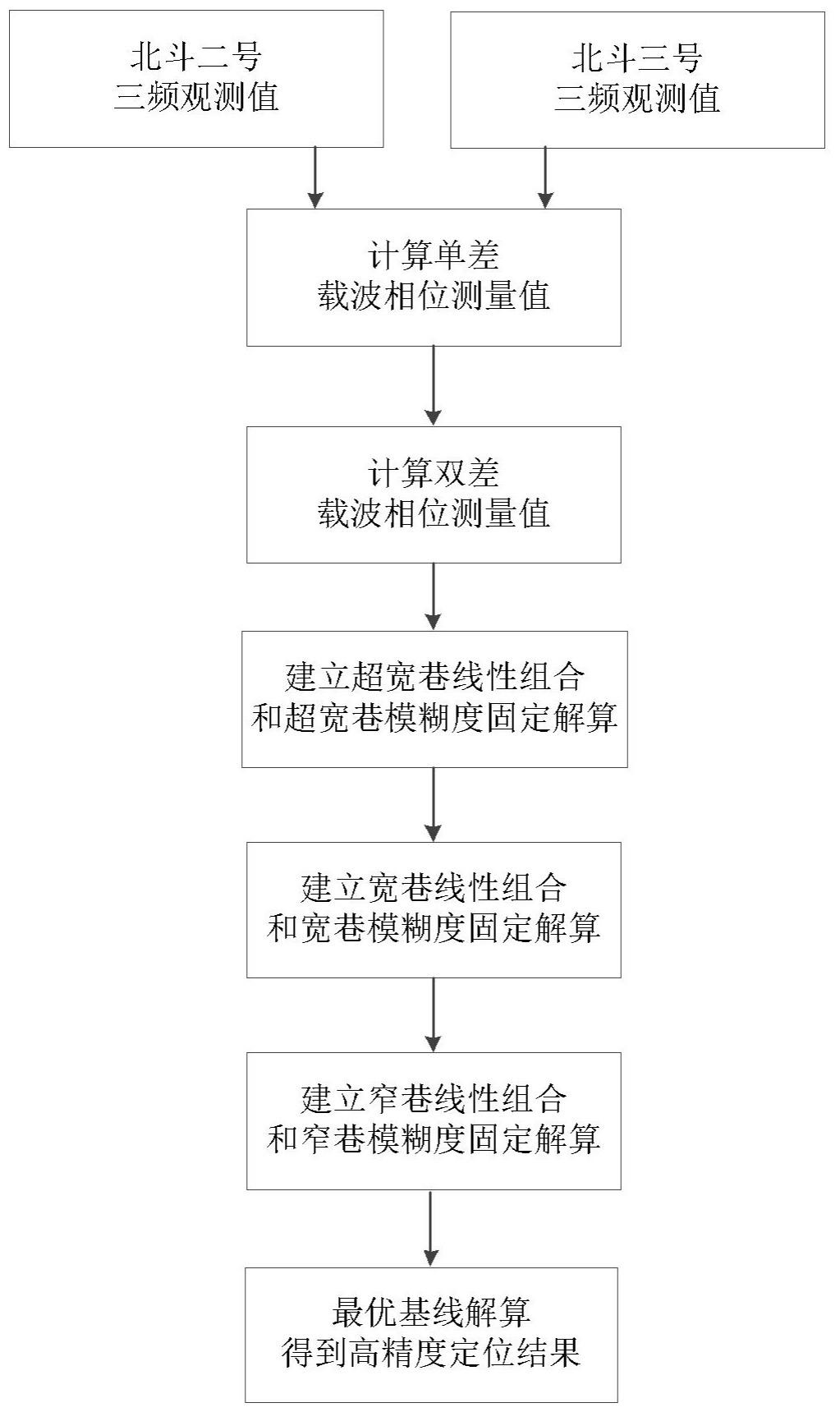
1、针对现有技术不足,本发明提供一种联合北斗二号和北斗三号的三频差分定位方法,包括以下步骤:
2、步骤1,获取北斗二号、北斗三号三频信号原始测量值;
3、步骤2,计算单差载波相位测量值;
4、步骤3,基于单差载波相位测量值,计算双差载波相位测量值;
5、步骤4,基于双差载波相位测量值和三频信号线性组合,建立超宽巷线性组合,并进行超宽巷模糊度固定解算;
6、步骤5,建立宽巷线性组合,并基于超宽巷模糊度固定解后的双差伪距组合测量值进行宽巷模糊度固定解算;
7、步骤6,建立窄巷线性组合,基于宽巷模糊度固定解后的双差伪距组合测量值,利用lambda算法解算窄巷模糊度;
8、步骤7,基于最小二乘算法求解最优基线向量校正量,得到高精度定位结果。
9、而且,所述步骤2中流动站接收机和基站接收机之间对卫星的单差载波相位测量值为:
10、(1)
11、式中,表示波长,表示流动站和基站之间的几何距离,表示电离层延迟,表示对流层延迟,表示载波频率,表示接收机钟差,表示流动站和基站的单差整周模糊度,表示单差量测噪声。
12、而且,所述步骤3中基于公式(1)单差载波相位测量值方程,在流动站接收机和基站接收机之间对卫星和卫星之间的单差载波相位测量值进行差分,由于,因此得到双差载波相位测量值:
13、(2)
14、式中,表示波长,、分别为基线向量在基站对卫星和卫星观测的投影方向,为基线向量,表示流动站接收机和基站接收机的双差整周模糊度,表示双差量测噪声。
15、而且,所述步骤4中基于公式(2)双差载波相位测量值方程,针对北斗二号系统(b1i, b2i, b3i)三频信号和北斗三号系统(b1i, b2b, b3i)三频信号,得到某一时刻的三频双差载波相位测量值分别为:
16、(3)
17、(4)
18、(5)
19、式中,下标“1”“2”“3”分别表示b1、b2、b3三个载波频率,表示波长,表示几何距离,表示卫星星历误差,表示对流层延迟,表示电离层延迟,表示整周模糊度,表示量测噪声。
20、基于公式(3)-公式(5),对三频双差载波测量值进行三频信号线性组合的表达式为:
21、(6)
22、式中,系数既可以是整数,也可以是分数,将组合系数记成。
23、基于公式(6)设置组合系数(0, -1, 1)为超宽巷线性组合,由于超宽巷为长波长观测值,中短基线下的组合方程残余误差小于该波长,因此对超宽巷模糊度取整能够得到超宽巷模糊度固定解,即:
24、(7)
25、式中,表示超宽巷模糊度,下标表示超宽巷组合,是超宽巷的波长,是超宽巷双差载波组合测量值,是超宽巷双差伪距组合测量值。
26、而且,所述步骤5中基于公式(6)设置组合系数(1, -1, 0)为宽巷线性组合,联合公式(7)超宽巷模糊度固定解后的修正双差伪距组合测量值,对宽巷模糊度取整得到宽巷模糊度固定解,则有:
27、(8)
28、式中,表示宽巷模糊度,下标表示宽巷组合,是宽巷的波长,是宽巷双差载波组合测量值,是超宽巷修正双差伪距组合观测值。
29、而且,所述步骤6中为了得到高精度厘米级的定位精度,基于公式(6)设置组合系数(1, 1, 0)为窄巷线性组合,联合公式(8)宽巷模糊度固定解后的修正双差伪距组合测量值,则有:
30、(9)
31、式中,表示窄巷模糊度,下标表示窄巷组合,是窄巷的波长,是窄巷双差载波组合测量值,是宽巷修正双差伪距组合观测值。
32、由于窄巷波长小,组合观测噪声小,直接取整窄巷模糊度容易产生错误,因此采用最小二乘模糊度降相关算法lambda解算窄巷模糊度。
33、而且,所述步骤7中联合公式(9),双差载波相位的相对定位方程的矩阵形式为:
34、(10)
35、式中,是双差载波相位测量值,是基线向量校正量,和是常系数矩阵,是窄巷模糊度。
36、基于最小二乘原理求得最优解使得测量残差的加权平方和最小,得到基线向量校正量,进而得到最优基线,再结合已知基站坐标,即可得到最终的高精度定位结果。
37、与现有技术相比,本发明具有如下优点:
38、相对单独北斗二号或者单独北斗三号的差分定位方法,本发明提出的方法将北斗二号和北斗三号联合组成线性组合,方法简单、计算量较小,同时提高了北斗卫星导航系统观测数据的利用率,也显著增加了差分定位的固定率,可达99.8%,进而提升了三频差分定位的精度。
技术特征:
1.一种联合北斗二号和北斗三号的三频差分定位方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种联合北斗二号和北斗三号的三频差分定位方法,其特征在于:步骤2中流动站接收机和基站接收机之间对卫星的单差载波相位测量值为:
3.如权利要求1所述的一种联合北斗二号和北斗三号的三频差分定位方法,其特征在于:步骤3中基于公式(1)单差载波相位测量值方程,在流动站接收机和基站接收机之间对卫星和卫星之间的单差载波相位测量值进行差分,由于,因此得到双差载波相位测量值:
4.如权利要求1所述的一种联合北斗二号和北斗三号的三频差分定位方法,其特征在于:步骤4中基于公式(2)双差载波相位测量值方程,针对北斗二号系统b1i、b2i、b3i三频信号和北斗三号系统b1i、b2b、b3i三频信号,得到某一时刻的三频双差载波相位测量值分别为:
5.如权利要求4所述的一种联合北斗二号和北斗三号的三频差分定位方法,其特征在于:步骤4中基于公式(6)设置组合系数(0, -1, 1)为超宽巷线性组合,由于超宽巷为长波长观测值,中短基线下的组合方程残余误差小于该波长,因此对超宽巷模糊度取整能够得到超宽巷模糊度固定解,即:
6.如权利要求1所述的一种联合北斗二号和北斗三号的三频差分定位方法,其特征在于:步骤5中基于公式(6)设置组合系数(1, -1, 0)为宽巷线性组合,联合公式(7)超宽巷模糊度固定解后的修正双差伪距组合测量值,对宽巷模糊度取整得到宽巷模糊度固定解,则有:
7.如权利要求1所述的一种联合北斗二号和北斗三号的三频差分定位方法,其特征在于:步骤6中为了得到高精度厘米级的定位精度,基于公式(6)设置组合系数(1, 1, 0)为窄巷线性组合,联合公式(8)宽巷模糊度固定解后的修正双差伪距组合测量值,则有:
8.如权利要求1所述的一种联合北斗二号和北斗三号的三频差分定位方法,其特征在于:步骤7中联合公式(9),双差载波相位的相对定位方程的矩阵形式为:
技术总结
本发明公开了一种联合北斗二号和北斗三号的三频差分定位方法。该方法选择相同中心频点的北斗二号系统(B1I,B2I,B3I)三频信号原始测量值和北斗三号系统(B1I,B2b,B3I)三频信号原始测量值进行联合组合,依次求得三频单差载波相位测量值、三频双差载波相位测量值,利用超宽巷、宽巷、窄巷线性组合以及LAMBDA算法求解整周模糊度,根据最小二乘算法进行三频差分基线解算得到高精度定位结果。相对单独北斗二号或者单独北斗三号的差分定位方法,本发明提出的方法将北斗二号和北斗三号联合组成线性组合,方法简单、计算量较小,同时提高了北斗卫星导航系统观测数据的利用率,也显著增加了差分定位的固定率,进而提升了三频差分定位的精度。
技术研发人员:邵慧超,郭向欣,叶瑾,涂振
受保护的技术使用者:立得空间信息技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!