一种声源三维定位的方法及装置与流程
本发明属于声源定位,更具体地,涉及一种声源三维定位的方法及装置。
背景技术:
1、麦克风阵列声源定位技术是一个确定声音空间来源位置的技术,属于被动定位技术。当声源定位系统探测目标时不会主动去发射信号,而是依靠接收被测目标所发出的信号对其完成定位。现有技术主要对平面声源定位从设别率、定位精度、拾音距离和定位范围等方面展开较为深入的研究,大部分已形成产品。
2、现有技术中,采用声源定位方法的定位装置普遍是在二维平面上的应用,在三维空间上定位的研究不透彻。对于三维空间上定位的研究只介绍了俯仰角和方位角的计算方法,对角度精度没有具体说明,存在精度不高的问题,且有效拾音距离较近。另外对声源距离的研究很少,没有实现三维坐标定位。
技术实现思路
1、因现有技术中的声源定位方法主要是在二维平面上的应用,本发明的目的在于设计一种声源三维定位的方法及装置,旨在实现三维空间中的声源定位方法,计算声源三维坐标,并改善定位精度不高且拾音距离近的现状。
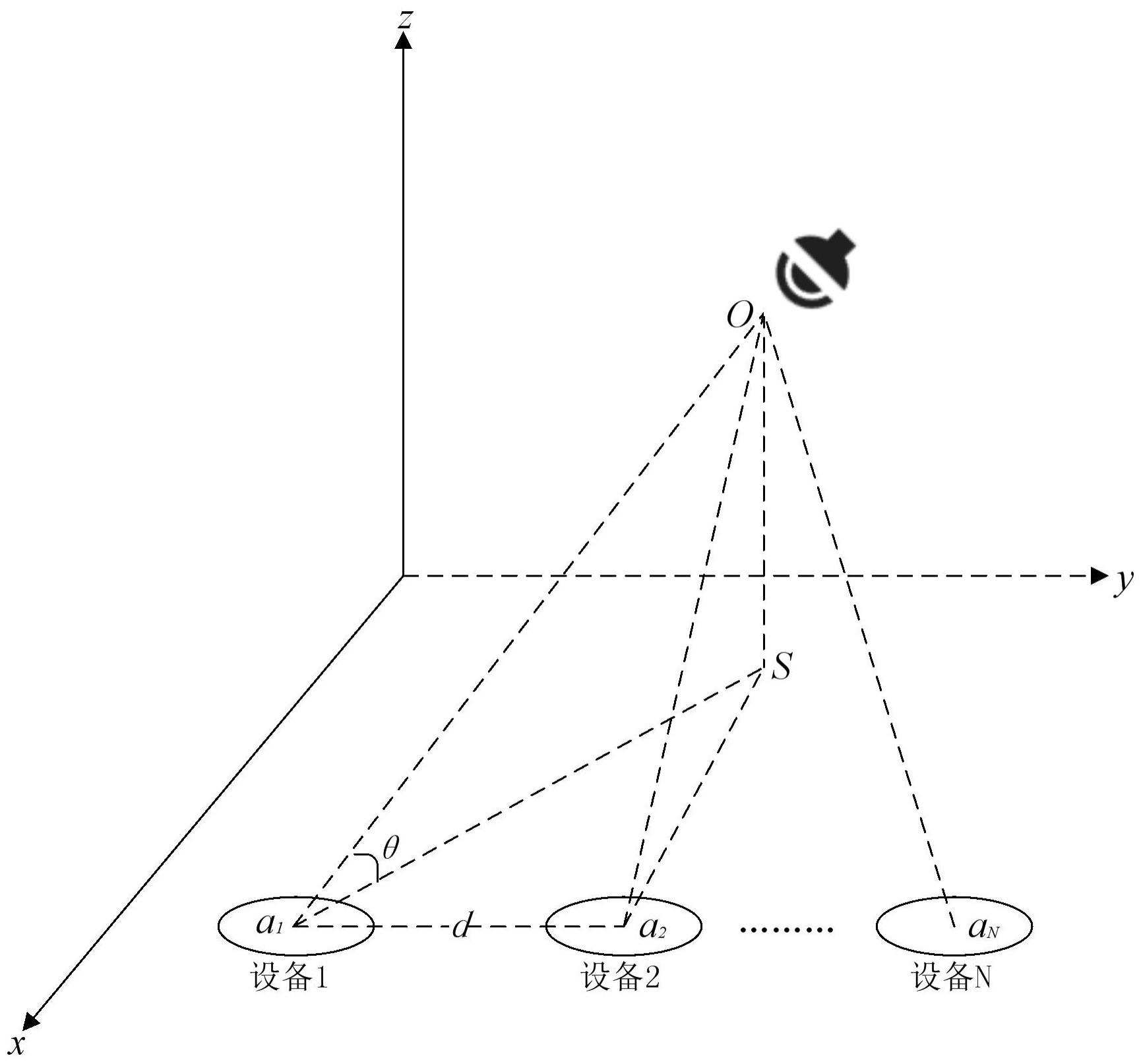
2、本发明提供了一种声源三维定位的方法,在三维空间直角坐标系的x轴、y轴和z轴的正负半轴上各放置一个麦克风,且每个麦克风到该坐标系原点的距离相等;声源三维定位的方法包括下述步骤:
3、当声源入射到麦克风阵列并被其接收时,获得麦克风接收到的信号时间差;
4、根据信号时间差获得声源到单个麦克风阵列定位设备的俯仰角和方位角;
5、根据声源到每个麦克风阵列的俯仰角和方位角获得直线方程;
6、根据声源在同一空间坐标系下到多个麦克风阵列的直线方程的交点获得声源位置。
7、更进一步地,采用广义互相关函数法对不同麦克风接收声音的时延以两个为一组进行估值计算。
8、作为本发明的一个实施例,对两个一组的麦克风采样数据的信号时间差的计算方法具体为:
9、(1)对音频数据进行分帧加窗和插值处理;
10、(2)对处理后的音频数据进行快速傅里叶变换;
11、(3)计算变换后的两个音频数据的互功率谱;
12、(4)对互功率谱进行加权处理,并进行快速傅里叶逆变换;
13、(5)通过峰值检测找到最大值点的所在位置,最大值点所在位置与采样率的比值即为两个麦克风接收到的信号的时间差。
14、更进一步地,可以根据公式获得俯仰角,根据公式获得方位角;其中,c为声速,为z轴上两个麦克风的信号时间差,r为这两个麦克风的间距。
15、更进一步地,当采用的麦克风平面阵列为四元阵列时,将整个360°全向拾音阵列划分为四个拾音区,角度范围分别是(45°,135°)、(135°,225°)、(225°,315°)和(315°,45°)。
16、其中,根据两个麦克风的时间差来判断声源属于四个拾音区中的一个。
17、更进一步地,通过插值法提高音频采样率。
18、本发明还提供了一种声源三维定位的装置,包括布置在三维空间的多个麦克风阵列,麦克风阵列中的麦克风设置在三维空间直角坐标系的x轴、y轴、z轴的正负半轴上,且每个麦克风到三维空间直角坐标系原点的距离相等。
19、工作时,当声源入射到麦克风阵列并被其接收时获得麦克风接收到的信号时间差;根据信号时间差获得声源到单个麦克风阵列定位设备的俯仰角和方位角;根据声源到每个麦克风阵列的俯仰角和方位角获得直线方程;根据声源在同一空间坐标系下到多个麦克风阵列的直线方程的交点获得声源位置。
20、通过本发明所构思的以上技术方案,与现有技术相比,由于使用了恰当的麦克风空间阵列结构和声源定位算法,使每个麦克风阵列设备可单独实时计算出俯仰角和方位角;通过拾音区判断,选择合适的麦克风音频数据,可计算出误差仅为1°的声源方位角度。多个麦克风阵列设备的联合使用,实现了对声源三维坐标的计算。
技术特征:
1.一种声源三维定位的方法,其特征在于,在三维空间直角坐标系的x轴、y轴和z轴的正负半轴上各放置一个麦克风,且每个麦克风到该坐标系原点的距离相等;声源三维定位的方法包括下述步骤:
2.如权利要求1所述的方法,其特征在于,采用广义互相关函数法对不同麦克风接收声音的时延以两个为一组进行估值计算。
3.如权利要求2所述的方法,其特征在于,对两个一组的麦克风采样数据的信号时间差的计算方法具体为:
4.如权利要求1所述的方法,其特征在于,根据公式获得俯仰角,根据公式获得方位角;
5.如权利要求1-4任一项所述的方法,其特征在于,当采用的麦克风平面阵列为四元阵列时,将整个360°全向拾音阵列划分为四个拾音区,角度范围分别是(45°,135°)、(135°,225°)、(225°,315°)和(315°,45°)。
6.如权利要求5所述的方法,其特征在于,根据两个麦克风的时间差来判断声源属于四个拾音区中的一个。
7.如权利要求5所述的方法,其特征在于,通过插值法提高音频采样率。
8.一种声源三维定位的装置,其特征在于,包括布置在三维空间的多个麦克风阵列,麦克风阵列中的麦克风设置在三维空间直角坐标系的x轴、y轴、z轴的正负半轴上,且每个麦克风到三维空间直角坐标系原点的距离相等。
9.如权利要求8所述的装置,其特征在于,工作时,当声源入射到麦克风阵列并被其接收时获得麦克风接收到的信号时间差;根据信号时间差获得声源到单个麦克风阵列定位设备的俯仰角和方位角;根据声源到每个麦克风阵列的俯仰角和方位角获得直线方程;根据声源在同一空间坐标系下到多个麦克风阵列的直线方程的交点获得声源位置。
技术总结
本发明属于声源定位技术领域,公开了一种声源三维定位的方法及装置,在三维空间直角坐标系的x轴、y轴和z轴的正负半轴上各放置一个麦克风,且每个麦克风到该坐标系原点的距离相等;声源三维定位的方法包括:当声源入射到麦克风阵列并被其接收时,获得麦克风接收到的信号时间差;根据信号时间差获得声源到单个麦克风阵列定位设备的俯仰角和方位角;根据声源到每个麦克风阵列的俯仰角和方位角获得直线方程;根据声源在同一空间坐标系下到多个麦克风阵列的直线方程的交点获得声源位置。采用本发明提供的定位方法可以获得声源的三维坐标,且精度高、拾音距离远。
技术研发人员:张帅,吴宇东
受保护的技术使用者:深圳市烽火宏声科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!