基于机器视觉的作物植株高度自动测量设备
本发明涉及农业自动化,具体涉及基于机器视觉的作物植株高度自动测量设备。
背景技术:
1、作物的生长过程分为发芽期、幼苗期、初花期、结果期等多个阶段,不同生长阶段的植株高度不同,对水肥、光照等环境因子的需求也是不同的。通过技术手段实现对作物株高的自动测量,自动记录、划分作物生长阶段,进而实施特定的管理策略,对农业增产增效具有重要意义;机器视觉的作物植株高度自动测量设备,是一种适用于温室、大棚、大田环境下的农作物植株高度的自动测量装置,依靠摄像头采集图像和设备控制器内运行参数模型算法,能实现对连续多株植物高度的快速、自动识别测量。
2、针对现有技术存在以下问题:
3、传统方法是选取部分样本,通过目测或使用卷尺手工测量,存在准确性差、耗时长、采集样本数量少等缺点。针对这一问题,本发明设计了一种可以对整垄植物进行连续、自动测量的设备。
技术实现思路
1、本发明提供基于机器视觉的作物植株高度自动测量设备,以解决上述背景技术中提出的问题。
2、为解决上述技术问题,本发明所采用的技术方案是:
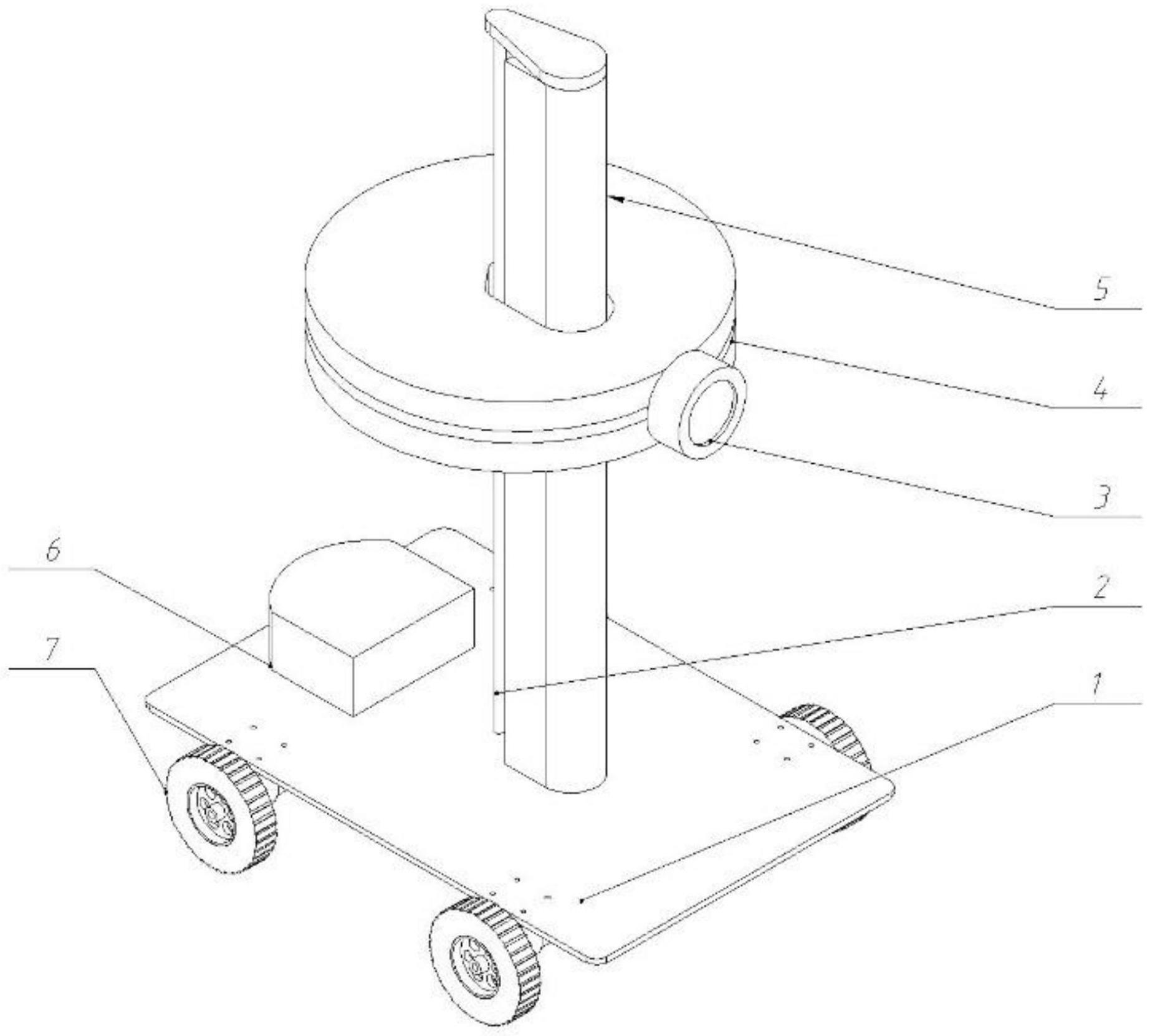
3、基于机器视觉的作物植株高度自动测量设备,包括小车底盘,所述小车底盘上表面的中部位置固定连接导向光杆,所述小车底盘的上表面转动连接有螺纹杆,所述导向光杆顶部的下表面固定安装有驱动电机一,所述驱动电机一转动轴的底部与螺纹杆的顶部固定安装,所述导向光杆位于螺纹杆的背面,所述螺纹杆的外壁螺纹连接有升降云台,所述导向光杆的外壁与升降云台的内壁活动套接,所述升降云台的外壁设置有摄像头。
4、所述小车底盘的上表面且位于导向光杆的背面固定安装有控制器,所述小车底盘底部的四角设置有小车电机及轮胎小车电机及轮胎,所述升降云台的正面固定安装有驱动电机,所述驱动电机转动轴的外壁固定安装有齿轮,所述齿轮的外壁啮合有齿排,所述齿排的底部固定安装有环形板,所述环形板的上下两端转动连接有耐磨轮,所述耐磨轮的外部滑动连接有导轨槽板,所述导轨槽板的一侧与升降云台的正面固定安装,所述环形板的右侧与摄像头的左侧固定安装,所述摄像头左侧的外壁转动连接有耐磨钢珠,所述耐磨钢珠外壁的一侧与升降云台正面的右侧传动连接。
5、本发明技术方案的进一步改进在于:所述摄像头与升降云台是可拆卸连接,且摄像头可以调整自身的视角,并能在升降云台的边沿旋转。
6、本发明技术方案的进一步改进在于:所述控制器主要用于运行图二所示算法并起到控制小车电机及轮胎和螺纹杆的作用,并最终将计算的高度结果输出到后台显示。
7、本发明技术方案的进一步改进在于:所述螺纹杆为丝杆结构,由步进电机控制升降调节摄像头高度。
8、本发明技术方案的进一步改进在于:所述升降云台的外侧布置了线轨结构,用于安装摄像头和调节左右位置。
9、本发明技术方案的进一步改进在于:所述小车底盘的上表面与控制器的底部固定安装,负责对图像信息进行直接处理完成高度测量,且安装有显示屏,用于显示当前测得的高度结果和摄像头图像信息。
10、本发明技术方案的进一步改进在于:所述小车底盘的底部安装四只轮子,用于连续多株植物测量时自动移动。
11、由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
12、1、本发明提供基于机器视觉的作物植株高度自动测量设备,结构设计简单,便于操作,同时通过设计内参数模型。
13、2、本发明提供基于机器视觉的作物植株高度自动测量设备,不需要人工设计任何标尺,完全依靠设备本身即可完成测量,使得测量更具便利性,在前景图片提取上将超绿灰度分割与边缘检测结合,极大提高了植物分割的准确性,使得高度测量结果更可靠。
技术特征:
1.基于机器视觉的作物植株高度自动测量设备,包括小车底盘(1),其特征在于:所述小车底盘(1)上表面的中部位置固定连接导向光杆(2),所述小车底盘(1)的上表面转动连接有螺纹杆(5),所述导向光杆(2)顶部的下表面固定安装有驱动电机一(8),所述驱动电机一(8)转动轴的底部与螺纹杆(5)的顶部固定安装,所述导向光杆(2)位于螺纹杆(5)的背面,所述螺纹杆(5)的外壁螺纹连接有升降云台(4),所述导向光杆(2)的外壁与升降云台(4)的内壁活动套接,所述升降云台(4)的外壁设置有摄像头(3);
2.根据权利要求1所述的基于机器视觉的作物植株高度自动测量设备,其特征在于:所述摄像头(3)与升降云台(4)是可拆卸连接,且摄像头(3)可以调整自身的视角,并能在升降云台(4)的边沿旋转。
3.根据权利要求1所述的基于机器视觉的作物植株高度自动测量设备,其特征在于:所述控制器(6)主要用于运行图二所示算法并起到控制小车电机及轮胎小车电机及轮胎(7)和螺纹杆(5)的作用,并最终将计算的高度结果输出到后台显示。
4.根据权利要求1所述的基于机器视觉的作物植株高度自动测量设备,其特征在于:所述螺纹杆(5)为丝杆结构,由步进电机控制升降调节摄像头(3)高度。
5.根据权利要求1所述的基于机器视觉的作物植株高度自动测量设备,其特征在于:所述升降云台(4)的外侧布置了线轨结构,用于安装摄像头(3)和调节左右位置。
6.根据权利要求1所述的基于机器视觉的作物植株高度自动测量设备,其特征在于:所述小车底盘(1)的上表面与控制器(6)的底部固定安装,负责对图像信息进行直接处理完成高度测量,且安装有显示屏,用于显示当前测得的高度结果和摄像头(3)图像信息。
7.根据权利要求1所述的基于机器视觉的作物植株高度自动测量设备,其特征在于:所述小车底盘(1)的底部安装四只轮子,用于连续多株植物测量时自动移动。
技术总结
本发明公开了基于机器视觉的作物植株高度自动测量设备,涉及农业自动化技术领域,包括小车底盘,所述小车底盘上表面的中部位置固定连接导向光杆,所述小车底盘的上表面转动连接有螺纹杆,所述导向光杆顶部的下表面固定安装有驱动电机一,所述驱动电机一转动轴的底部与螺纹杆的顶部固定安装,所述导向光杆位于螺纹杆的背面,所述螺纹杆的外壁螺纹连接有升降云台。本发明结构设计简单,便于操作,同时通过设计内参数模型;不需要人工设计任何标尺,完全依靠设备本身即可完成测量,使得测量更具便利性,在前景图片提取上将超绿灰度分割与边缘检测结合,极大提高了植物分割的准确性,使得高度测量结果更可靠。
技术研发人员:田海涛,谢志明,梁立君,吴慈鹏,万嘉诚
受保护的技术使用者:天津工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!