一种透明物体检测方法、系统及地图构建方法、系统与流程
本发明涉及建图,尤其涉及一种透明物体检测方法、系统及地图构建方法、系统。
背景技术:
1、随着当前人工智能领域的快速发展,移动机器人逐渐被运用于生活中的各个领域中。slam技术是移动机器人自主定位与构建地图的重要技术,目前主流的slam技术应用为激光slam(基于激光雷达)和视觉slam(基于单/双目摄像头)。室内机器人,如扫地机器人一般采用激光slam,激光雷达测距比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易;同时,点云信息本身包含直接的几何关系,使得机器人的路径规划和导航变得直观。
2、激光雷达技术虽然可以精确的构建出环境地图,但是由于激光雷达是依靠反射激光信号来完成建构环境地图的,所以一旦出现透明物体,例如透明玻璃,无法将信号反射回传感器,则无法完成准确的建构环境地图。然而现代建筑中充斥着大量的透明玻璃,严重阻碍机器人的正常行走,因而解决这一问题成为当务之急。
技术实现思路
1、为了解决相关的透明物体检测困难的问题,本发明提供一种透明物体检测方法、系统及地图构建方法、系统。所述技术方案是:
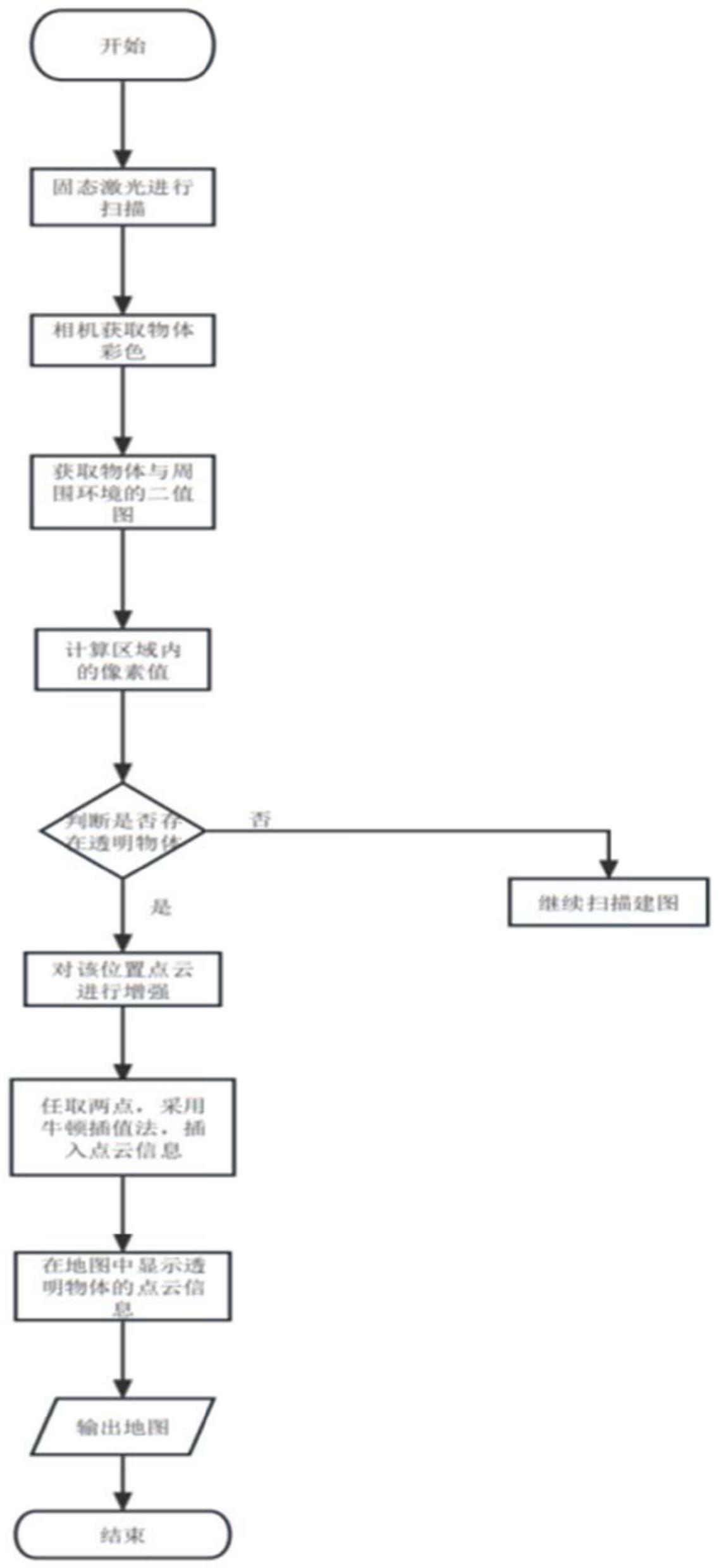
2、一种透明物体检测方法,包括:
3、通过设置在移动机器人上的激光雷达获取透明物体的候选区域;
4、通过设置在移动机器人上的相机获取所述候选区域的图像;
5、根据所述图像判断是否存在所述透明物体;
6、若存在,则确认所述候选区域存在所述透明物体;
7、若不存在,则确认所述候选区域不存在所述透明物体。
8、在一实施例中,所述通过设置在移动机器人上的激光雷达获取透明物体的候选区域,包括:
9、通过设置在移动机器人上的激光雷达获取周边环境的点云数据,所述点云数据包括每个点的方位角、垂直角度、距离值和强度;
10、筛选点云强度大于第一阈值的点云数据;
11、根据筛选的所述点云数据确定所述透明物体的候选区域。
12、在一实施例中,所述通过设置在移动机器人上的相机获取所述候选区域的图像,包括:
13、将所述候选区域的点云由激光雷达坐标转换为在相机坐标系下的坐标;
14、根据转换后的坐标调整所述相机角度,并获取所述候选区域的图像。
15、在一实施例中,所述根据所述图像判断是否存在所述透明物体,包括:
16、根据第二阈值将所述图像转换为二值图像;
17、若所述二值图像有灰度差,则存在所述透明物体;否则不存在所述透明物体。
18、另一技术方案是:
19、一种透明物体检测系统,采用以上所述的检测方法,且包括:
20、激光雷达,用于获取周边环境的点云数据;
21、第一检测单元,用于通过所述激光雷达获取的点云数据确认透明物体的候选区域;
22、相机,用于获取所述第一检测单元确认的候选区域的图像;
23、第二检测单元,用于根据所述相机获取的图像判断是否存在所述透明物体,若存在,则确认所述候选区域存在所述透明物体,若不存在,则确认所述候选区域不存在所述透明物体。
24、另一技术方案是:
25、一种含透明物体环境的地图构建方法,包括以上的检测方法,且还包括:
26、通过设置在移动机器人上的激光雷达获取周边环境的点云数据,并获取透明物体的候选区域;
27、提取所述激光雷达获取的点云数据中的特征点,且所述候选区域的点云数据属于特征点;
28、通过设置在移动机器人上的相机获取所述候选区域的图像;
29、根据所述图像判断是否存在所述透明物体;
30、若存在所述透明物体,则更新所述候选区域的点云数据,并进行点云配准;否则,对所述激光雷达获取的点云数据进行下采样处理,并进行点云配准;
31、根据配准后的点云数据进行建图。
32、在一实施例中,所述提取所述点云数据中的特征点,且所述候选区域的点云数据属于特征点,包括:
33、采用多层特征提取所述点云数据中的特征点。
34、另一技术方案是:
35、一种含透明物体环境的地图构建系统,采用以上所述的地图构建方法,且包括:
36、激光雷达,用于获取周边环境的点云数据;
37、第一检测单元,用于通过所述激光雷达获取的点云数据确认透明物体的候选区域;
38、相机,用于获取所述第一检测单元确认的候选区域的图像;
39、第二检测单元,用于根据所述图像判断是否存在所述透明物体,若存在,则将所述候选区域的点云数据传送至更新单元,若不存在,则将所述激光雷达获取的点云数据传送至下采样单元;
40、更新单元,用于更新接收到的点云数据;
41、下采样单元,用于对接收到的点云数据进行下采样处理;
42、配准单元,用于当存在所述透明物体时,根据更新后的点云数据进行点云配准;当不存在所述透明物体时,根据下采样后的点云数据进行点云配准;
43、建图模块,用于根据配准后的点云数据进行建图。
44、与现有技术相比,本发明的有益效果是:
45、本发明先通过激光雷达获取透明物体的候选区域,即透明物体可能存在的大致位置,再通过相机获取图像进行确认,提高了透明物体检测准确度,且通过相机获取候选区域的图像,缩小了检测范围,提高了检测效率,同时,该方法使得玻璃检测能够很好的移植到机器人的建图当中去,在不影建图精度的情况下,有效地检测出环境中的透明物体,丰富地图的信息,有利于机器人的导航与避障。
技术特征:
1.一种透明物体检测方法,其特征在于,包括:
2.根据权利要求1所述的透明物体检测方法,其特征在于,所述通过设置在移动机器人上的激光雷达获取透明物体的候选区域,包括:
3.根据权利要求1所述的透明物体检测方法,其特征在于,所述通过设置在移动机器人上的相机获取所述候选区域的图像,包括:
4.根据权利要求1所述的透明物体检测方法,其特征在于,所述根据所述图像判断是否存在所述透明物体,包括:
5.一种透明物体检测系统,其特征在于,采用如权利要求1-4任一所述的检测方法,且包括:
6.一种含透明物体环境的地图构建方法,其特征在于,包括如权利要求1-4任一所述的检测方法,且还包括:
7.根据权利要求6所述的含透明物体环境的地图构建方法,其特征在于,所述提取所述点云数据中的特征点,且所述候选区域的点云数据属于特征点,包括:
8.一种含透明物体环境的地图构建系统,其特征在于,采用如权利要求6所述的地图构建方法,且包括:
技术总结
本发明公开了一种透明物体检测方法、系统及地图构建方法、系统,属于建图技术领域。针对透明物体检测困难的问题,本发明提供透明物体检测方法,包括通过设置在移动机器人上的激光雷达获取透明物体的候选区域;通过设置在移动机器人上的相机获取所述候选区域的图像;根据所述图像判断是否存在所述透明物体;若存在,则确认所述候选区域存在所述透明物体;若不存在,则确认所述候选区域不存在所述透明物体。本发明先通过激光雷达获取透明物体的候选区域,即透明物体可能存在的大致位置,再通过相机获取图像进行确认,提高了透明物体检测准确度。
技术研发人员:许召辉,张鹏飞,宋晓勇,陈年生
受保护的技术使用者:中航华东光电(上海)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!