一种汽轮机转子偏心监测装置的制作方法
本发明涉及汽轮机,尤其涉及一种汽轮机转子偏心监测装置。
背景技术:
1、汽轮机转子是汽轮机转动部分的总称。汽轮机转子的作用是汇集各级叶栅上所得到的机械能并传递给发电机转子。汽轮机转子主要包括主轴、叶轮或转毂、动叶片及联轴器。汽轮机转子的偏心是指转子由于弯曲变形导致轴心发生的偏移。在汽轮机运行过程中会对汽轮机转子偏心进行监测,当汽轮机转子偏心较大时则认为汽轮机转子弯曲变形较大,若汽轮机持续运行必然造成转子振动大。此时必须查明汽轮机转子偏心原因并使汽轮机转子偏心值符合标准后方能启动汽轮机。
2、有鉴于此,有必要研究出一种汽轮机转子偏心监测装置,以解决上述问题。
技术实现思路
1、本发明提供了一种汽轮机转子偏心监测装置,在汽轮机转轴的两端分别安装监测环,在监测环内安装多组监测头,监测头采集的监测数据发送至监测主机,监测主机运算监测数据得到汽轮机转子偏心状况。
2、本发明采用如下技术方案来实现的:
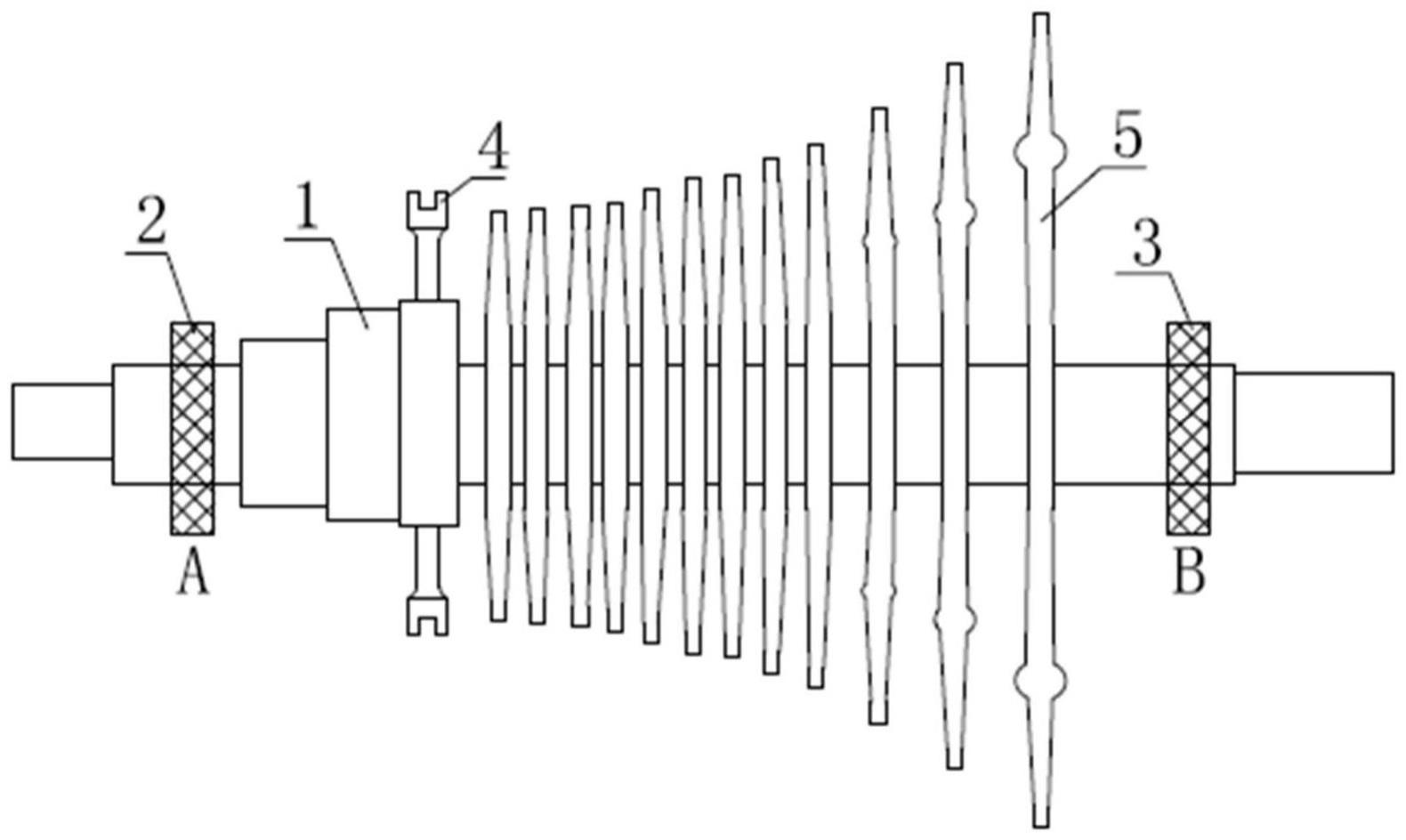
3、一种汽轮机转子偏心监测装置,包括:安装于汽轮机转轴一端的第一监测环、安装于汽轮机转轴另一端的第二监测环、用于固定所述第一监测环和所述第二监测环的固定座;
4、所述第一监测环靠近汽轮机的主叶轮设置,所述第二监测环靠近汽轮机的最大叶轮设置,所述第一监测环和所述第二监测环均与汽轮机转轴同轴设置;
5、所述第一监测环和所述第二监测环上均安装有监测单元,每个监测单元均监测监测点至汽轮机转轴的最短距离,每个监测单元均与处理器连接,处理器处理最短距离得到汽轮机转轴的偏心状态。
6、本发明进一步的改进在于,所述第一监测环和所述第二监测环均绕汽轮机转轴的轴线周向旋转;
7、所述固定座上安装有驱动旋转组件,驱动旋转组件驱动所述第一监测环和所述第二监测环旋转。
8、本发明进一步的改进在于,所述第一监测环和所述第二监测环上均安装有监测环运动监测模块,监测环运动监测模块监测所述第一监测环或所述第二监测环的旋转状态;
9、监测环运动监测模块与处理器连接,处理器根据旋转状态确定所述第一监测环和所述第二监测环的状态。
10、本发明进一步的改进在于,所述第一监测环和所述第二监测环上均安装有监测环速度监测模块,监测环速顿监测模块监测所述第一监测环或所述第二监测环的旋转状态;
11、监测环速度监测模块与处理器连接,处理器根据旋转状态确定所述第一监测环和所述第二监测环的运动速度和运动加速度。
12、本发明进一步的改进在于,所述第一监测环包括第一半圆环和第二半圆环,第一半圆环和第二半圆环扣合成圆环,第一半圆环和第二半圆环择一位于所述固定座,所述第一监测环旋转过程中第一半圆环和第二半圆环交替接触所述固定座,第一半圆环和第二半圆环上均设有监测单元、监测环运动监测模块和监测环速度监测模块;
13、所述第二监测环包括第三半圆环和第四半圆环,第三半圆环和第四半圆环扣合成圆环,第三半圆环和第四半圆环择一位于所述固定座,所述第三监测环旋转过程中第三半圆环和第四半圆环交替接触所述固定座,第三半圆环和第四半圆环上均设有监测单元、监测环运动监测模块和监测环速度监测模块。
14、本发明进一步的改进在于,所述第一监测环的监测单元包括:安装于第一半圆环上的多组第一监测模块、安装于第二半圆环上的多组第二监测模块,多组第一监测模块呈90°~120°分布于第一半圆环,多组第二监测模块呈90°~120°分布于第二半圆环,多组第一监测模块和多组第一监测模块均与处理器连接。
15、本发明进一步的改进在于,所述第二监测环的监测单元包括:安装于第三半圆环上的多组第三监测模块、安装于第四半圆环上的多组第四监测模块,多组第三监测模块呈90°~120°分布于第三半圆环,多组第四监测模块呈90°~120°分布于第四半圆环,多组第三监测模块和多组第四监测模块均与处理器连接。
16、本发明进一步的改进在于,第一监测模块、第二监测模块、第三监测模块和第四监测模块结构相同;
17、第一监测模块、第二监测模块、第三监测模块和第四监测模块均包括若干电涡流传感器,若干电涡流传感器的电阻值不同,每个电涡流传感器均设置有第一电阻和第二电阻,第一电阻和第二电阻的电阻值不同。
18、本发明进一步的改进在于,若干电涡流传感器的直径不同,若干电涡流传感器包括最大直径电涡流传感器、围绕最大直径电涡流传感器设置的多个较大直径电涡流传感器、围绕每个较大直径电涡流传感器设置的多个型号中直径电涡流传感器、多个较小直径电涡流传感器、多个最小直径电涡流传感器。
19、本发明进一步的改进在于,每种直径的电涡流传感器监测距离的最大值不同;
20、每种直径的电涡流传感器均与处理器连接。
21、与现有技术相比,本发明至少具有如下有益的技术效果:
22、本发明在汽轮机转轴的两端分别安装监测环,在监测环内安装多组监测头,监测头采集的监测数据发送至监测主机,监测主机运算监测数据得到汽轮机转子偏心状况。
技术特征:
1.一种汽轮机转子偏心监测装置,其特征在于,包括:安装于汽轮机转轴一端的第一监测环、安装于汽轮机转轴另一端的第二监测环、用于固定所述第一监测环和所述第二监测环的固定座;
2.根据权利要求1所述的一种汽轮机转子偏心监测装置,其特征在于,所述第一监测环和所述第二监测环均绕汽轮机转轴的轴线周向旋转;
3.根据权利要求1所述的一种汽轮机转子偏心监测装置,其特征在于,所述第一监测环和所述第二监测环上均安装有监测环运动监测模块,监测环运动监测模块监测所述第一监测环或所述第二监测环的旋转状态;
4.根据权利要求1所述的一种汽轮机转子偏心监测装置,其特征在于,所述第一监测环和所述第二监测环上均安装有监测环速度监测模块,监测环速顿监测模块监测所述第一监测环或所述第二监测环的旋转状态;
5.根据权利要求1所述的一种汽轮机转子偏心监测装置,其特征在于,所述第一监测环包括第一半圆环和第二半圆环,第一半圆环和第二半圆环扣合成圆环,第一半圆环和第二半圆环择一位于所述固定座,所述第一监测环旋转过程中第一半圆环和第二半圆环交替接触所述固定座,第一半圆环和第二半圆环上均设有监测单元、监测环运动监测模块和监测环速度监测模块;
6.根据权利要求1所述的一种汽轮机转子偏心监测装置,其特征在于,所述第一监测环的监测单元包括:安装于第一半圆环上的多组第一监测模块、安装于第二半圆环上的多组第二监测模块,多组第一监测模块呈90°~120°分布于第一半圆环,多组第二监测模块呈90°~120°分布于第二半圆环,多组第一监测模块和多组第一监测模块均与处理器连接。
7.根据权利要求6所述的一种汽轮机转子偏心监测装置,其特征在于,所述第二监测环的监测单元包括:安装于第三半圆环上的多组第三监测模块、安装于第四半圆环上的多组第四监测模块,多组第三监测模块呈90°~120°分布于第三半圆环,多组第四监测模块呈90°~120°分布于第四半圆环,多组第三监测模块和多组第四监测模块均与处理器连接。
8.根据权利要求7所述的一种汽轮机转子偏心监测装置,其特征在于,第一监测模块、第二监测模块、第三监测模块和第四监测模块结构相同;
9.根据权利要求8所述的一种汽轮机转子偏心监测装置,其特征在于,若干电涡流传感器的直径不同,若干电涡流传感器包括最大直径电涡流传感器、围绕最大直径电涡流传感器设置的多个较大直径电涡流传感器、围绕每个较大直径电涡流传感器设置的多个型号中直径电涡流传感器、多个较小直径电涡流传感器、多个最小直径电涡流传感器。
10.根据权利要求9所述的一种汽轮机转子偏心监测装置,其特征在于,每种直径的电涡流传感器监测距离的最大值不同;
技术总结
本发明一种汽轮机转子偏心监测装置,包括:安装于汽轮机转轴一端的第一监测环、安装于汽轮机转轴另一端的第二监测环、用于固定第一监测环和第二监测环的固定座;所述第一监测环靠近汽轮机的主叶轮设置,所述第二监测环靠近汽轮机的最大叶轮设置,所述第一监测环和所述第二监测环均与汽轮机转轴同轴设置;所述第一监测环和所述第二监测环上均安装有监测单元,每个监测单元均监测监测点至汽轮机转轴的最短距离,每个监测单元均与处理器连接,处理器处理最短距离得到汽轮机转轴的偏心状态。本发明在汽轮机转轴的两端分别安装监测环,在监测环内安装多组监测头,监测头采集的监测数据发送至监测主机,监测主机运算监测数据得到汽轮机转子偏心状况。
技术研发人员:谷巍,田爽,李念震,杨柏依,李晓博,赵亮,郑峰,章硕,董鹏
受保护的技术使用者:西安热工研究院有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!