X射线衍射测角仪动力传动与测角装置及其角度控制方法与流程
本发明涉及一种x射线衍射测角仪动力传动与测角装置及其角度控制方法,属于高效率的高精密机床的。
背景技术:
1、随着我国尖端大型仪器的快速发展进,工业化进程的持续推进,工业、科研等领域对材料分析、应力分析等的需求快速增加,衍射仪的精度需求也逐步与世界水平接轨。其中测角式x射线衍射类仪器的基础,就是精密角度的动力传动、控制与检测,也就是精密测角仪装置。国内衍射仪行业普遍采用的测角仪装置均为双蜗轮蜗杆机构,实现精密测角。这类装置结构复杂,非标专用零部件多,加工精度要求高,装配难度高,重量和体积大,蜗轮蜗杆逐渐磨损等等。这就造成现有测角仪传动装置的结构复杂、成本高、生产调试周期长,整机成本高,产量低,装配调试人员要求高,现场大修困难等,诸多难题急需解决。
技术实现思路
1、本发明要解决的技术问题是提供一种x射线衍射测角仪动力传动与测角装置,该装置采用四连杆的连接结构,并通过精密角传感器实时监测设备的旋转角速度,并反馈后控制电机转速,实现滑块的移动距离与角速度相匹配,达到设备的高精度匀速旋转的目的。
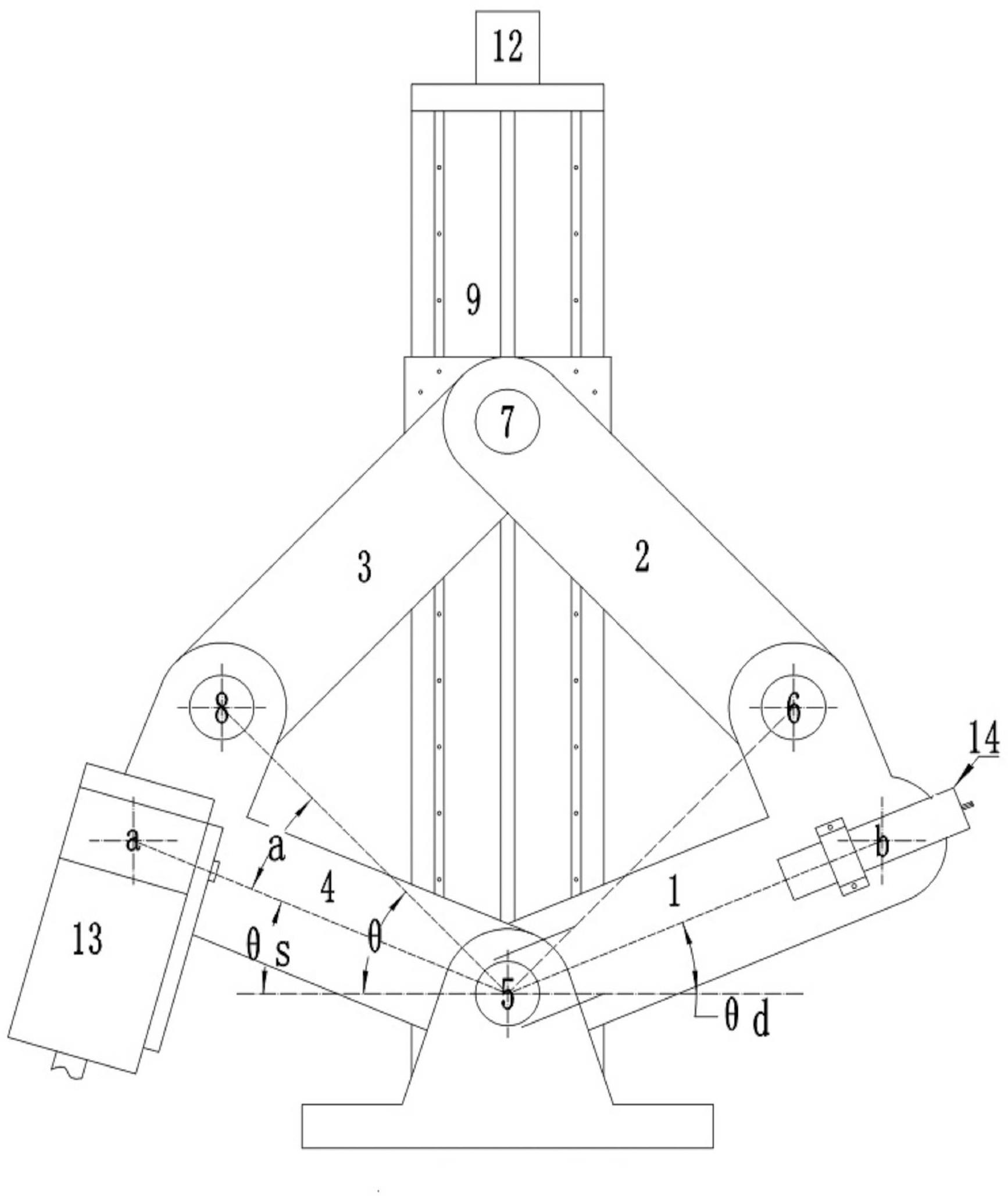
2、为解决以上问题,本发明的具体技术方案如下:一种x射线衍射测角仪动力传动与测角装置,在支撑台的后端设置竖直的丝杠,丝杠顶部连接电机,丝杠推动上连接的滑块通过牵引轴与接收牵引臂和发射牵引臂的上端部铰接;在支撑台的前端设有轴承座,轴承座安装不旋转的固定支撑轴,接收臂和发射臂的一端分别与固定支撑轴铰接,接收臂的另一端与接收牵引臂的下端部通过接收轴铰接,发射臂的另一端与发射牵引臂的下端部通过发射轴铰接;在接收臂的定点b上设有探测器部件,在发射臂的定点a上设有射线管部件;在接收臂与固定支撑轴的铰接处后部设有精密角传感器,精密角传感器与接收臂固定连接,并与固定支撑轴同心。
3、接收臂、接收牵引臂、发射牵引臂和发射臂组成四连杆机构,四连杆机构所在的四条边相等。
4、对于x射线衍射测角仪动力传动与测角装置的角度控制方法,包括以下步骤:
5、1)设定四连杆结构投影在竖直面的四边形为面abcd,其中固定支撑轴为a点,牵引轴为b点,发射轴为c点,接收轴为d点;线段ac与水平面的夹角为θ,线段ac、线段bc、线段bc、线段ad的长度为r,线段ab的长度为x,线段ac与水平面的角度为θ,通过推导得出sinθ=x/2r;
6、2)定点a与水平面的角度为θs,定点a与a点所形成的线段与线段ac之间的夹角为固定角度α,故θs=θ-α;定点b与定点a对称设置,定点b与水平面的角度为θd,
7、θd=θs;
8、3)驱动电机,丝杠带动滑块上下移动,探测器部件和射线管部件分别以固定支撑轴为中心旋转,通过精密角传感器在设定的时间周期上,检测θd的绝对角度值,外部控制机构得到θd的逐个时间周期的角度值,通过逐个时间周期得到θd的角度值和公式sinθ=x/2r,经过换算得出x=sinθ·2r,外部控制机构实时控制电机的旋转速度和或方向,以控制滑块的升降速度,即线段ab的长度,从而控制θd按照扫描要求的匀角速度变化,θs角同步做镜像对称变化。
9、本申请采用上述技术方案,具有以下技术效果:
10、1、简洁的四连杆组合丝杠动力传动装置,大幅降低测角仪体积、重量、零部件数量,降低加工难度、装配复杂度、控制电路硬件需求;
11、2、提供了衍射测角仪的最为基础和重要的扫描时间和角度参数,为衍射仪控制与参数提取提供了一种目前最为简洁的机构;
12、3、本发明能使测角式x射线衍射仪朝小型化、轻量化、低成本化方向演进一大步。
技术特征:
1.一种x射线衍射测角仪动力传动与测角装置,其特征在于:在支撑台(10)的后端设置竖直的丝杠,丝杠顶部连接电机(12),丝杠推动上连接的滑块(9)通过牵引轴(7)与接收牵引臂(2)和发射牵引臂(3)的上端部铰接;在支撑台(10)的前端设有轴承座,轴承座安装不旋转的固定支撑轴(5),接收臂(1)和发射臂(4)的一端分别与固定支撑轴(5)铰接,接收臂(1)的另一端与接收牵引臂(2)的下端部通过接收轴(6)铰接,发射臂(4)的另一端与发射牵引臂(3)的下端部通过发射轴(8)铰接;在接收臂(1)的定点b上设有探测器部件(14),在发射臂(4)的定点a上设有射线管部件(13);在接收臂(1)与固定支撑轴(5)的铰接处后部设有精密角传感器(11),精密角传感器(11)与接收臂(1)固定连接,并与固定支撑轴(5)同心。
2.根据权利要求1所述的x射线衍射测角仪动力传动与测角装置,其特征在于:接收臂(1)、接收牵引臂(2)、发射牵引臂(3)和发射臂(4)组成四连杆机构,四连杆机构所在的四条边相等。
3.对于权利要求2所述的x射线衍射测角仪动力传动与测角装置的角度控制方法,其特征在于包括以下步骤:
技术总结
本发明涉及一种X射线衍射测角仪动力传动与测角装置,在支撑台的后端上下升降的滑块通过牵引轴与接收牵引臂和发射牵引臂的上端部铰接;在支撑台的前端支撑固定支撑轴,接收臂和发射臂的一端分别与固定支撑轴铰接,接收臂的另一端与接收牵引臂的下端部通过接收轴铰接,发射臂的另一端与发射牵引臂的下端部通过发射轴铰接;在接收臂的定点b上设有探测器部件,在发射臂的定点a上设有射线管部件;在接收臂与固定支撑轴的铰接处后部设有精密角传感器,精密角传感器与接收臂固定连接,并与固定支撑轴同心。该装置采用四连杆的连接结构,并通过精密角传感器实时监测设备的旋转角速度,并反馈后控制电机转速,实现滑块的移动距离与角速度相匹配,达到设备的高精度匀速旋转的目的。
技术研发人员:杨卫东,高宇辉,孙玉宝
受保护的技术使用者:丹东奥龙射线仪器集团有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!