一种移动机器人的自动导航系统、导航方法、设备及介质与流程
本发明涉及机器人导航,具体为一种移动机器人的自动导航系统、导航方法、设备及介质。
背景技术:
1、移动机器人是一种能够自主移动和执行任务的机器人系统。它通常包括机械结构、电子控制系统和感知系统等组件,以实现在各种环境中的移动和操作能力。移动机器人的应用领域广泛,包括工业自动化、物流和仓储、服务和卫生保健、农业和环境监测等。它们可以执行各种任务,如物品搬运、巡逻和安全监控、室内清洁等。移动机器人的自主导航和智能决策能力不断发展,为人们的生活和工作带来了便利和效率的提升。在现有技术中,通过salm算法构建全局地图进行路径规划,无法实现在未知环境下的自主导航和避障,同时,通过salm算法依赖于特定的传感器配置,在复杂动态环境的情况下,难以构建高精度路径规划。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明提供一种移动机器人的自动导航系统、导航方法、设备及介质,以解决上述技术问题。
2、本发明提供的一种移动机器人的自动导航系统,包括:
3、感知模块,所述感知模块用于获取移动机器人的位置信息、姿态信息以及环境信息,其中,所述环境信息包括障碍物位置、地图数据;
4、无地图规划模块,所述无地图规划模块与所述感知模块连接,所述无地图规划模块用于接收所述位置信息、所述环境信息,并基于无地图规划算法计算得到路径规划和避障决策,生成移动机器人的运动规划路径;
5、高斯过程优化规划模块,所述高斯过程优化规划模块与所述感知模块、所述无地图规划模块连接,所述高斯过程优化规划模块用于接收移动机器人的所述位置信息、所述姿态信息以及所述路径规划和所述避障决策,并基于高斯过程优化算法生成实时的控制决策;
6、执行控制模块,所述执行控制模块与所述高斯过程优化规划模块连接,所述执行控制模块用于接收控制决策,控制移动机器人的运动。
7、于本发明的一实施例中,所述感知模块包括激光雷达、摄像头、距离传感器、惯性测量单元。
8、于本发明的一实施例中,所述执行控制模块包括伺服控制器、伺服电机。
9、本发明还提供一种移动机器人的自动导航方法,应用于移动机器人的自动导航系统,包括:
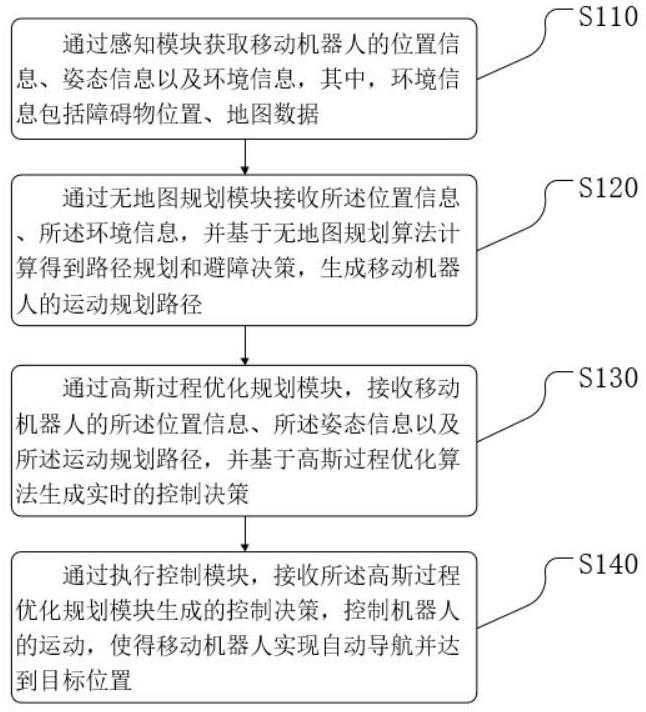
10、s110:通过感知模块获取移动机器人的位置信息、姿态信息以及环境信息,其中,环境信息包括障碍物位置、地图数据;
11、s120:通过无地图规划模块接收所述位置信息、所述环境信息,并基于无地图规划算法计算得到路径规划和避障决策,生成移动机器人的运动规划路径;
12、s130:通过高斯过程优化规划模块,接收移动机器人的所述位置信息、所述姿态信息以及所述运动规划路径,并基于高斯过程优化算法生成实时的控制决策;
13、s140:通过执行控制模块,接收所述高斯过程优化规划模块生成的控制决策,控制机器人的运动,使得移动机器人实现自动导航并达到目标位置。
14、于本发明的一实施例中,步骤s120具体包括:
15、s210:接收移动机器人的所述位置信息、所述环境信息,其中,环境信息包括障碍物位置、地图数据;
16、s220:根据所述位置信息、所述地图数据使用无地图规划算法生成移动机器人的运动路径;
17、s230:接收移动机器人的运动路径,根据运动路径中所述障碍物位置,使用避障决策算法对运动路径进行调整;
18、s240:根据避障决策算法对运动路径调整的结果,生成移动机器人的运动规划路径。
19、于本发明的一实施例中,步骤s230中的避障决策算法包括避障力场法、最小转弯半径法。
20、于本发明的一实施例中,步骤s130具体包括:
21、s310:接收移动机器人的所述位置信息、所述姿态信息以及所述运动规划路径;
22、s320:基于当前移动机器人的所述位置信息和所述姿态信息,以及所述运动规划路径,使用高斯过程优化算法生成目标控制指令;
23、s330:根据高斯过程优化算法生成的目标控制指令,生成实时的控制决策。
24、于本发明的一实施例中,步骤s320具体包括:
25、s410:根据移动机器人的所述位置信息、所述姿态信息以及所述运动规划路径,构建高斯过程模型,其中,高斯过程模型的函数空间包括定义均值函数和协方差函数;
26、s420:根据高斯过程优化算法在函数空间中以最小化指定的优化目标函数搜索最优解;
27、s430:根据最优解生成目标控制指令。
28、本发明还提供一种电子设备,所述电子设备包括:
29、一个或多个处理器;
30、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现如上述实施例中任一项所述的一种移动机器人的自动导航方法。
31、本发明还提供一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行如上述实施例中任一项所述的一种移动机器人的自动导航方法。
32、本发明的有益效果:本发明提供一种移动机器人的自动导航系统、导航方法、设备及介质,该系统包括感知模块、无地图规划模块、高斯过程优化规划模块、执行控制模块,该方法包括通过感知模块获取移动机器人的位置信息、姿态信息以及环境信息,其中,环境信息包括障碍物位置、地图数据;通过无地图规划模块接收所述位置信息、所述环境信息,并基于无地图规划算法计算得到路径规划和避障决策,生成移动机器人的运动规划路径;通过高斯过程优化规划模块,接收移动机器人的所述位置信息、所述姿态信息以及所述运动规划路径,并基于高斯过程优化算法生成实时的控制决策;通过执行控制模块,接收所述高斯过程优化规划模块生成的控制决策,控制机器人的运动,使得移动机器人实现自动导航并达到目标位置。产生的有益效果包括:
33、1、实时性:通过无地图规划算法和高斯过程优化算法可以实时地进行路径规划和决策,不需要事先建立地图。实现移动机器人可以在未知环境中即时做出决策,并根据当前感知到的环境信息进行调整。
34、2、灵活性:由于不依赖事先建立的地图,无地图规划算法和高斯过程优化算法可以适应不同的环境和任务。机器人可以灵活地在新的或未知的环境中进行导航,而无需事先进行地图构建。
35、3、简化系统:相对于slam算法需要同时进行建图和定位,同时使用无地图规划算法和高斯过程优化算法可以简化系统架构和计算需求。减少复杂性并提高实时性能。
36、4、适用性:无地图规划算法和高斯过程优化算法适用于各种类型的移动机器人,包括无人机、无人车和机器人手臂等。它们不依赖于特定的传感器配置或机器人平台,因此具有更广泛的适用性。
37、5、路径规划精度:无地图规划算法和高斯过程优化算法可以提供较高的路径规划精度,尤其是在具有复杂动态环境的情况下。可以根据实时感知到的障碍物信息和环境变化进行动态调整,以获得更准确的路径规划结果。
38、综上所述,同时使用无地图规划算法和高斯过程优化算法可以提供实时性、灵活性和简化系统的优势,使移动机器人能够在未知环境中高效地进行自主导航和控制。
39、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!