一种飞机外形三维点云获取方法与流程
本发明涉及数字化测量,具体地说,涉及一种飞机外形三维点云获取方法。
背景技术:
1、新型战机的研制已成为各国航空制造业竞相抢占的技术高地,新一代战机其高隐身性、超高音速性和脉动式的生产方式,推动着航空器制造业朝着高精度、高效率、智能化方向快速发展。其中,飞机外形的三维形貌检测是飞机制造过程中的关键一环。飞机的几何外形直接决定飞机的隐身性及气动性等关键指标,因此快速、准确的飞机外形三维点云获取方法对于保证飞机生产质量和延长生命周期具有重要作用。目前主流的飞机外形三维点云获取方法主要基于视觉测量,例如通过不同空间位置的双相机拍摄飞机表面待测区域,利用双目视觉原理进行深度求解进而得到三维点云数据。此方法适应性强,应用场景广泛,但其测量过程中涉及到相机标定、图像立体匹配、空间坐标系转换等步骤,求解复杂且易引入不必要的误差。
2、光学检测方法具有无损伤、高精度、高效率等特点,已广泛应用于先进制造、材料科学等领域,在飞机外形检测领域同样具有良好的应用前景。主流的光学检测方法包括激光共聚焦法、白光干涉法、结构光测量法、自动检焦测量法等。其中激光共聚焦测量系统需引入针孔结构,白光干涉测量系统需引入参考面结构,结构光测量系统需引入条纹投影结构,这三种测量结构均比较复杂,不利于快速、便携、可移动式检测。而自动检焦测量系统仅需相机和扫描执行机构即可实现三维形貌检测,测量系统结构简单、测量适应性强,可作为飞机外形三维形貌检测的有效手段。
技术实现思路
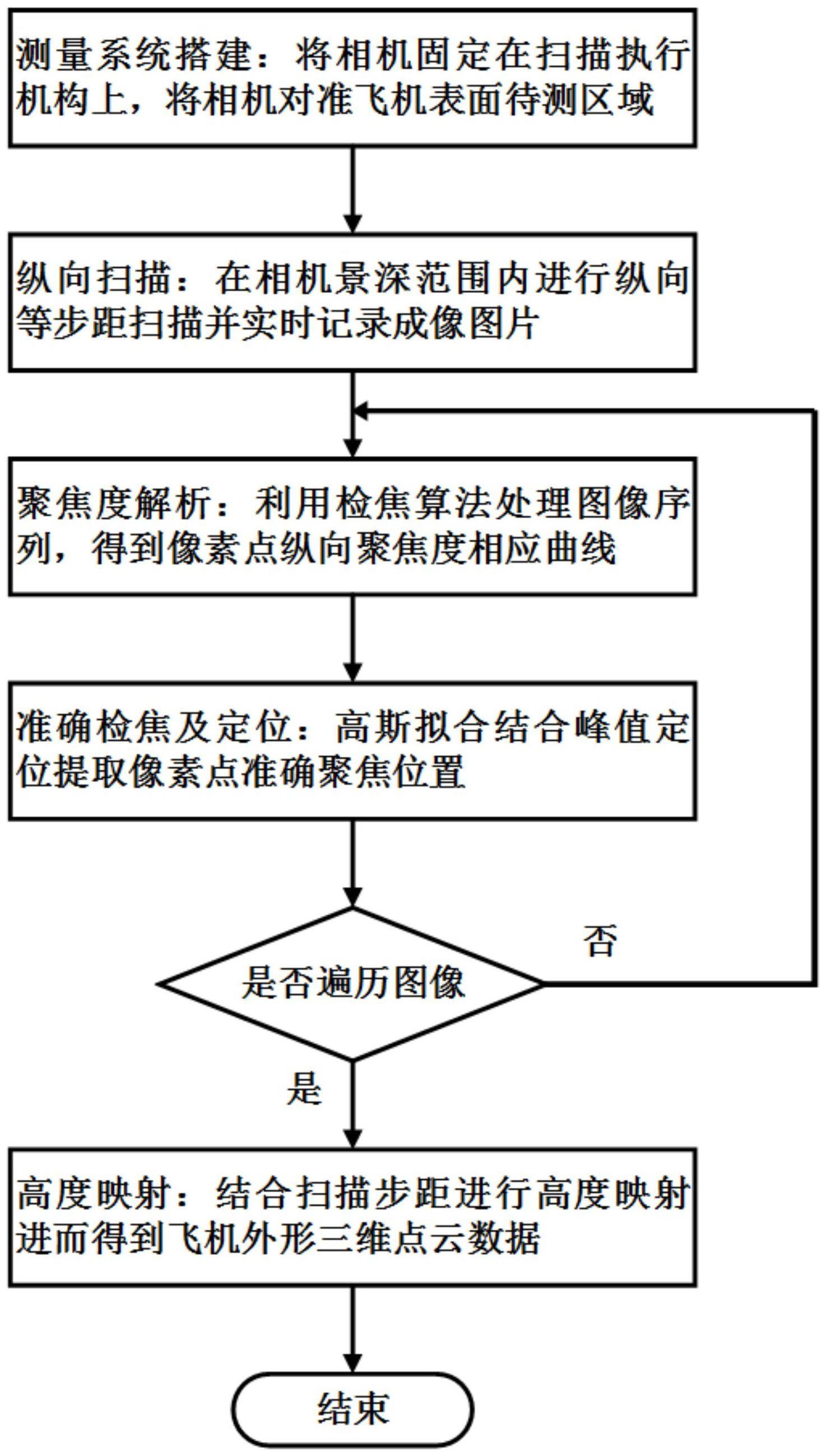
1、本发明针对现有的检测方法不利于快速、便携、可移动式检测的问题,提出一种飞机外形三维点云获取方法,首先将相机的成像视场中央对准飞机表面待测区域;其次调节扫描执行机构的纵向位置,将待测区域设置在相机的焦深范围内,得到成像图像序;然后利用检焦算法处理得到像素点纵向聚焦度响应曲线,并将像素点纵向聚焦度响应曲线的峰值位置进行高斯拟合及峰值定位,得到像素点准确聚焦位置;最后进行高度映射得到像素点的相对高度信息,实现飞机表面三维点云数据的获取,避免了相机标定、图像立体匹配、空间坐标系转换等步骤,简化了测量过程,规避了不必要的误差引入风险,具有无损伤、高效率、低成本、高适应性的特点。
2、本发明具体实现内容如下:
3、一种飞机外形三维点云获取方法,具体包括以下步骤:
4、步骤1:将相机固定在纵向扫描执行机构上,并将相机的成像视场中央对准飞机表面待测区域;
5、步骤2:调节扫描执行机构纵向位置,将待测区域设置在相机的焦深范围内,得到成像图像序;
6、步骤3:利用检焦算法处理所述成像图像序列,获取像素点在图像中的聚焦程度,得到像素点纵向聚焦度响应曲线;
7、步骤4:将所述像素点纵向聚焦度响应曲线的峰值位置进行高斯拟合及峰值定位,得到像素点准确聚焦位置pfocus;
8、步骤5:根据所述扫描执行机构的纵向扫描步距sstep进行高度映射,得到像素点的相对高度信息,得到飞机表面三维点云数据。
9、为了更好地实现本发明,进一步地,步骤2中所述调节扫描执行机构纵向位置的具体操作为:调用上位机程序控制扫描执行机构,以等步距且单方向的形式移动相机,并在每个纵向位置记录成像并存储到计算机中。
10、为了更好地实现本发明,进一步地,所述步骤3中所述利用检焦算法处理成像图像序列时,根据飞机表面的轮廓区域和连续区域分别采取不同的检焦算法,若为飞机不同部位或者不同材料间的轮廓区域,采用基于sobel算子的tenegrad函数提取聚焦度曲线;若为飞机同一部位或同一材料中的连续区域,采用拉普拉斯能量和聚焦评价函数提取聚焦度曲线。
11、为了更好地实现本发明,进一步地,所述基于sobel算子的tenegrad函数为:
12、
13、其中分别为sobel算子运算下(x,y)像素领域灰度的水平和垂直变化,k为设定阈值。
14、为了更好地实现本发明,进一步地,所述拉普拉斯能量和聚焦评价函数为:
15、
16、其中,f(x,y)为像素点(x,y)的灰度值,step为计算步长,m表示横向领域范围,n表示纵向领域范围。
17、为了更好地实现本发明,进一步地,步骤5中所述根据所述扫描执行机构的纵向扫描步距sstep进行高度映射的映射关系为:
18、h(x,y)=pfocus×sstep
19、其中,pfocus为像素点准确聚焦位置,sstep为扫描执行机构的纵向扫描步距。
20、为了更好地实现本发明,进一步地,所述扫描执行机构为步进电机。
21、本发明具有以下有益效果:
22、(1)本发明与传统视觉测量方法相比,采用单相机光学测量方法,避免了相机标定、图像立体匹配、空间坐标系转换等步骤,简化了测量过程,规避了不必要的误差引入风险。
23、(2)本发明与其他主流光学测量方法相比,测量系统简单,仅需相机及扫描执行机构即可实现三维点云获取。
24、(3)本方法同时具有无损伤、高效率、低成本、高适应性的特点。
技术特征:
1.一种飞机外形三维点云获取方法,其特征在于,具体包括以下步骤:
2.根据权利要求1所述的一种飞机外形三维点云获取方法,其特征在于,所述步骤3中所述利用检焦算法处理成像图像序列时,根据飞机表面的轮廓区域和连续区域分别采取不同的检焦算法,若为飞机不同部位或者不同材料间的轮廓区域,采用基于sobel算子的tenegrad函数提取聚焦度曲线;若为飞机同一部位或同一材料中的连续区域,采用拉普拉斯能量和聚焦评价函数提取聚焦度曲线。
3.根据权利要求2所述的一种飞机外形三维点云获取方法,其特征在于,所述基于sobel算子的tenegrad函数为:
4.根据权利要求2所述的一种飞机外形三维点云获取方法,其特征在于,所述拉普拉斯能量和聚焦评价函数为:
5.根据权利要求1所述的一种飞机外形三维点云获取方法,其特征在于,步骤5中所述根据所述扫描执行机构的纵向扫描步距sstep进行高度映射的映射关系为:
6.根据权利要求1所述的一种飞机外形三维点云获取方法,其特征在于,步骤2中所述调节扫描执行机构纵向位置的具体操作为:调用上位机程序控制扫描执行机构,以等步距且单方向的形式移动相机(2),并在每个纵向位置记录成像并存储到计算机中。
7.根据权利要求1-6任一项所述的飞机外形三维点云获取方法,其特征在于,所述扫描执行机构为步进电机(1)。
技术总结
本发明涉及数字化测量技术领域,具体地说,涉及一种飞机外形三维点云获取方法;该方法首先将相机的成像视场中央对准飞机表面待测区域;其次调节扫描执行机构的纵向位置,将待测区域设置在相机的焦深范围内,得到成像图像序;然后利用检焦算法处理得到像素点纵向聚焦度响应曲线,并将像素点纵向聚焦度响应曲线的峰值位置进行高斯拟合及峰值定位,得到像素点准确聚焦位置;最后进行高度映射得到像素点的相对高度信息,实现飞机表面三维点云数据的获取,避免了相机标定、图像立体匹配、空间坐标系转换等步骤,简化了测量过程,规避了不必要的误差引入风险,具有无损伤、高效率、低成本、高适应性的特点。
技术研发人员:刘磊,朱绪胜,陈代鑫,周力,秦琪,韩利亚,刘清华,马帅,蔡怀阳,陈俊佑
受保护的技术使用者:成都飞机工业(集团)有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!