一种智能路径规划方法及设备与流程
本申请涉及人工智能领域,具体涉及一种智能路径规划方法及设备。
背景技术:
1、本部分旨在为权利要求书中陈述的本申请的实施方式提供背景或上下文。此处的描述不因为包括在本部分中就承认是已被公开的现有技术。
2、机器人运动路径规划为在满足一定的物理约束条件下,为机器人完成设定任务和动作所设计的运动序列安排,分为全局机器人规划和局部机器人规划。
3、目前的路径规划方法主要为:
4、1.规划出一条避免碰撞的路线;
5、2.规划出一条到达目标点的高效率的路线。
6、其中规划出的路线的形式为一条从起点到终点的路线。
7、在这些路径规划方法中无法构建更详细的目标物或障碍物信息,而且即使有一些以探测障碍物为目的的路径规划方法,也只是简单的以固定距离进行探测,而不会根据障碍物的已探测情况实时规划接下来的探测路径。
技术实现思路
1、本申请的目的在于提供一种智能路径规划方法及设备,可以实时获取更全面的目标物体或障碍物的模型/信息并根据障碍物的情况实时规划探测的路径。
2、本申请公开了一种智能路径规划方法,包括:
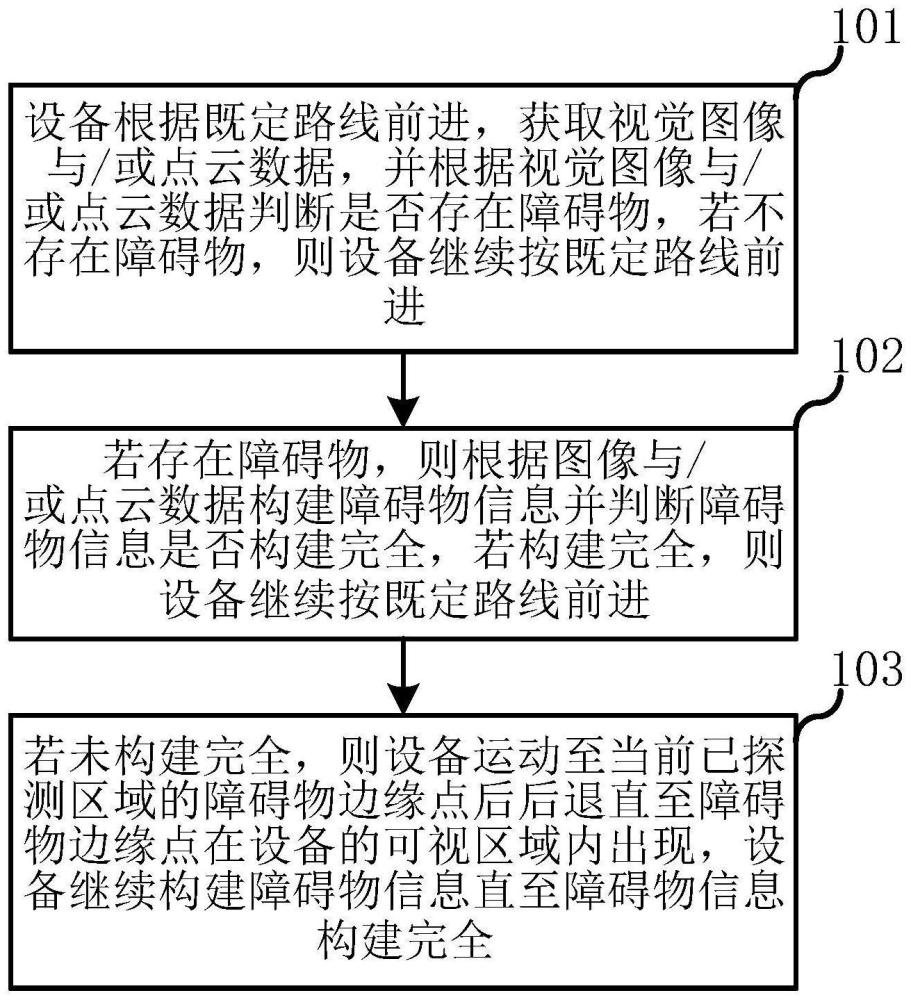
3、设备根据既定路线前进,获取视觉图像与/或点云数据,并根据所述视觉图像与/或点云数据判断是否存在障碍物,若不存在障碍物,则所述设备继续按所述既定路线前进;
4、若存在障碍物,则根据所述图像与/或点云数据构建障碍物信息并判断所述障碍物信息是否构建完全,若构建完全,则所述设备继续按所述既定路线前进;
5、若未构建完全,则所述设备运动至当前已探测区域的障碍物边缘点后后退直至所述障碍物边缘点在所述设备的可视区域内出现,所述设备继续构建障碍物信息直至所述障碍物信息构建完全。
6、在一个优选例中,所述设备继续构建障碍物信息直至所述障碍物信息构建完全进一步包括:
7、所述设备规划继续前进以及探索所述障碍物的路线;
8、所述设备根据规划的路线前进至当前已探测区域的障碍物边缘点;
9、所述设备旋转并规划使所述障碍物边缘点进入所述设备可视范围内的最短路线;
10、所述设备沿所述障碍物的边沿继续前进直至所述障碍物信息构建完全。
11、在一个优选例中,包括:
12、所述设备前进过程中绕开所述障碍物并执行设备预定动作;
13、所述设备在执行所述设备预定动作时从不同方向探测所述障碍物的同时构建所述障碍物模型。
14、在一个优选例中,包括:
15、所述设备沿所述障碍物的边沿行走固定距离;
16、所述设备旋转后退使所述障碍物进入所述设备可视范围内以构建所述障碍物信息;
17、所述设备继续沿所述障碍物的边沿行走固定距离,直到所述障碍物信息构建完全。
18、在一个优选例中,所述点云数据为所述障碍物被摄像头观察到的面上的点。
19、在一个优选例中,所述设备的所述视觉图像探测范围为15cm-100cm。
20、在一个优选例中,所述设备通过双目视觉进行所述视觉图像的探测。
21、在一个优选例中,所述设备通过深度摄像头进行所述视觉图像的探测。
22、本申请还公开了一种智能路径规划设备,包括:
23、存储器,用于存储计算机可执行指令;以及,
24、处理器,与所述存储器耦合,用于在执行所述计算机可执行指令时实现如前文描述的方法中的步骤。
25、本申请还公开了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器执行时实现如前文描述的方法中的步骤。
26、本申请的实施方式中,是以探测障碍物或目标物体为目标的路径规划方法,可以使设备实时获取更全面的目标物体或障碍物的模型/信息,根据障碍物的情况实时规划探测的路径,若模型/信息未构建完毕,当设备探测到目标物体或障碍物的边缘点后才会调整视角范围使目标物体或障碍物重新出现在可视范围内并继续进行障碍物探测,取代了常规以固定距离进行探测的方法,提升了探测和规划效率。
27、上述
技术实现要素:
中公开的各个技术特征、在下文各个实施方式和例子中公开的各技术特征、以及附图中公开的各个技术特征,都可以自由地互相组合,从而构成各种新的技术方案(这些技术方案均应该视为在本说明书中已经记载),除非这种技术特征的组合在技术上是不可行的。例如,在一个例子中公开了特征a+b+c,在另一个例子中公开了特征a+b+d+e,而特征c和d是起到相同作用的等同技术手段,技术上只要择一使用即可,不可能同时采用,特征e技术上可以与特征c相组合,则,a+b+c+d的方案因技术不可行而应当不被视为已经记载,而a+b+c+e的方案应当视为已经被记载。
技术特征:
1.一种智能路径规划方法,其特征在于,包括:
2.如权利要求1所述的智能路径规划方法,其特征在于,所述设备继续构建障碍物信息直至所述障碍物信息构建完全进一步包括:
3.如权利要求1所述的智能路径规划方法,其特征在于,包括:
4.如权利要求1所述的智能路径规划方法,其特征在于,包括:
5.如权利要求1所述的智能路径规划方法,其特征在于,所述点云数据为所述障碍物被摄像头观察到的面上的点。
6.如权利要求1所述的智能路径规划方法,其特征在于,所述设备的所述视觉图像探测范围为15cm-100cm。
7.如权利要求1所述的智能路径规划方法,其特征在于,所述设备通过双目视觉进行所述视觉图像的探测。
8.如权利要求1所述的智能路径规划方法,其特征在于,所述设备通过深度摄像头进行所述视觉图像的探测。
9.一种智能路径规划设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器执行时实现如权利要求1至8中任意一项所述的方法中的步骤。
技术总结
本申请涉及人工智能领域,公开了一种基于障碍物目标探测的智能路径规划方法及设备,可以实时获取更全面的目标物体或障碍物的模型/信息并根据障碍物的情况实时规划探测的路径。该方法包括:设备根据既定路线前进,获取视觉图像与/或点云数据,并根据视觉图像与/或点云数据判断是否存在障碍物,若不存在障碍物,则设备继续按既定路线前进;若存在障碍物,则根据图像与/或点云数据构建障碍物信息并判断障碍物信息是否构建完全,若构建完全,则设备继续按既定路线前进;若未构建完全,则设备运动至当前已探测区域的障碍物边缘点后后退直至障碍物边缘点在设备的可视区域内出现,设备继续构建障碍物信息直至障碍物信息构建完全。
技术研发人员:单国超,许鲤蓉,骆张强
受保护的技术使用者:神顶科技(南京)有限公司
技术研发日:
技术公布日:2024/12/2
- 还没有人留言评论。精彩留言会获得点赞!