本发明属于无人驾驶车辆矿区高精度地图采集,具体涉及一种露天矿山无人驾驶车辆行驶轨迹生成方法,能够基于矿区道路可行驶区域边界生成矿卡行驶轨迹。
背景技术:
1、由于矿区道路无道路标线的特点,传统的视觉识别方法难以生成车辆行驶轨迹,现有技术中无人驾驶车辆的行驶轨迹的生成方法主要有:基于道路标线的道路中心线和高精度卫星定位的采集方法。
2、其中,基于道路标线的道路中心线常用于道路标线清晰的铺装道路。通常使用激光雷达、航测影像等手段采集道路现状,通过自动化识别与计算工具解析道路标线,使用道路标线作为参考,提取两条道路标线的中心线作为车辆行驶轨迹。高精度卫星定位采集是无人驾驶矿区普遍采用的车辆行驶轨迹方式,其特点在于不依赖路面的标线,在采集车加装gps模块并基于卫星定位采集车辆行驶轨迹。车辆沿道路行驶时使用卫星定位技术采集轨迹点。采集结束后根据车身安装卫星定位天线的位置、车头朝向、车身宽度、天线高度的信息,建立采集车辆物理模型,基于采集过程中的实时数据构建无人驾驶车辆行驶轨迹。
3、在矿区场景中,车辆行驶道路一般为无道路标线的非铺装道路,因此基于道路标线的车道中心线方式不适用于矿区道路。高精度卫星定位的采集方式有采集效率低的弊端,重建全区地图需要大量的实车采集工作,并且受天气影响、卫星信号不稳定等外界干扰因素较大。
技术实现思路
1、鉴于上述分析,本发明实施例旨在提供一种露天矿山无人驾驶车辆行驶轨迹生成方法,能够满足露天矿山场景下道路高频变更性的同时可以实时生成矿区车辆行驶轨迹,提高矿区车辆行驶轨迹生成速率。生成的车辆行驶轨迹满足车辆动力学要求,易于矿区无人驾驶车辆预瞄跟踪。
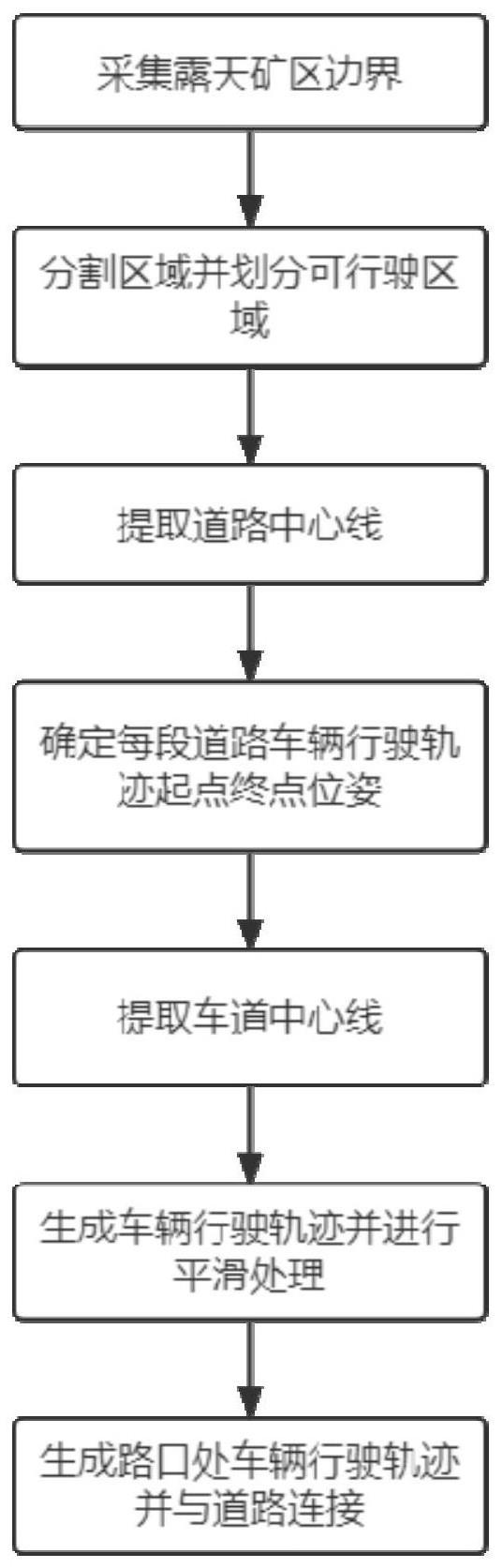
2、本发明的一种露天矿山无人驾驶车辆行驶轨迹生成方法,包括以下具体步骤:
3、步骤1,采集矿区行驶区域的道路边界和路口边界;
4、步骤2,获取矿区行驶区域的道路区域和路口区域;
5、步骤3,在每个道路区域,根据该道路的左右道路边界提取道路中心线;
6、步骤4,基于道路中心线和车辆行驶规则获得道路区域驶入点位置和驶出点位置;
7、步骤5,根据道路边界和道路中心线获得右侧车道中心线和左侧车道中心线,以右侧车道中心线和左侧车道中心线作为无人驾驶车辆的道路初始轨迹;
8、步骤6,根据无人驾驶车辆的长度、宽度和最小转弯半径,将道路边界作为约束条件,使用序列二次规划方法对无人驾驶车辆的道路初始轨迹进行优化处理获得道路行驶轨迹;
9、步骤7,生成无人驾驶车辆的路口区域行驶轨迹。
10、可选地,步骤1中,对矿区行驶区域进行测绘,并沿矿区的行驶区域的边界进行采集,生成矿区的道路边界和路口边界。
11、可选地,步骤3中,提取道路中心线方法为:在道路区域的左道路边界设置多个左节点,在右道路边界上设置多个右节点;按两个对应边的对应节点最短距离原则对左道路边界的左节点和右侧道路边界的右节点进行一对一匹配;将一对一匹配的左节点和右节点连线,获取连线的道路中点;将所有道路中点顺序连成线,获得道路中心线。
12、可选地,步骤4中,以道路中心线的方向确定右侧车道和左侧车道;确定右侧车道和左侧车道对应的右侧车道方向和左侧车道方向;由右侧车道方向和左侧车道方向确定对应车道的起点方向和终点方向;由车道的起点和终点方向确定车道对应的驶入点位置和驶出点位置。
13、可选地,步骤5中,在每条道路区域的道路中心线设置多个中心节点,按两个对应边的对应节点最短距离原则对右道路边界的右节点和道路中心线的中心节点进行一对一匹配;将一对一匹配的右道路边界的右节点和道路中心线的中心节点连线,取连线的右车道中点;将获取的所有车道中点顺序连成线,获得右道路中心线。
14、可选地,步骤5中,在每条道路区域的道路中心线设置多个中心节点,按两个对应边的对应节点最短距离原则对左道路边界的左节点和道路中心线的中心节点进行一对一匹配;将一对一匹配的左道路边界的左节点和道路中心线的中心节点连线,取连线的车道中点;将获取的所有左车道中点顺序连成线,获得左道路中心线。
15、可选地,步骤6中,使所优化后的道路区域行驶轨迹最小曲率半径不超过无人驾驶车辆的最小转弯半径且不与边界发生碰撞冲突。
16、可选地,步骤7中,确定路口区域边界以及路口区域与道路区域的分界线;在分界线上确定多个拓扑点,并确定为多个所述拓扑点为驶入点还是驶出点;选取不同路口区域的边界线上的驶入点和驶出点,连接不同路口区域的边界线上的驶入点和驶出点的路口区域行驶轨迹;获取路口区域行驶轨迹上的轨迹点。
17、与现有技术相比,本发明至少具有如下有益效果:
18、(1)本发明的方法提出了一种非接触式的采集方式,不需要现场定位打点测量和采集车现场循迹或者雷达扫描。进行车辆行驶轨迹采集时,采集车无需事先进入无人驾驶区域,避免了采集系统和正常作业的无人驾驶矿卡碰撞的危险,提高了矿区作业安全性。
19、(2)本发明的方法具有较强的抗干扰能力。相对于gps采集方案,本方案不受阴雨等天气因素影响,不受道路积水、打滑等道路通行条件约束,可以在大多数的矿区环境采集。
20、(3)本发明的方法综合利用矿区地形、边界、车辆宽度、车辆运动学参数等约束条件,相对于gps采集方案,所生成车辆行驶轨迹平滑度较好,无数据漂移,点间距均匀,环境适应性强。
21、(4)本发明的方法无需重复采集路径,现有的gps采集方法以及道路标线采集方法在路况发生变化时,需要进行重新采集。在重新采集的过程中易受到外界干扰,难以保证车辆行驶路径的实时更新。本专利中所述方法不需要重复采集路径,并且可以实时更新车辆行驶轨迹。
22、(5)本发明的方法无需重复采集路径,故降低了采集设备成本、人工成本以及运维成本。
技术特征:1.一种露天矿山无人驾驶车辆行驶轨迹生成方法,其特征在于,包括以下具体步骤:
2.根据权利要求1所述的行驶轨迹生成方法,其特征在于,步骤1中,对矿区行驶区域进行测绘,并沿矿区的行驶区域的边界进行采集,生成矿区的道路边界和路口边界。
3.根据权利要求1所述的行驶轨迹生成方法,其特征在于,步骤3中,提取道路中心线方法为:在道路区域的左道路边界设置多个左节点,在右道路边界上设置多个右节点;按两个对应边的对应节点最短距离原则对左道路边界的左节点和右侧道路边界的右节点进行一对一匹配;将一对一匹配的左节点和右节点连线,获取连线的道路中点;将所有道路中点顺序连成线,获得道路中心线。
4.根据权利要求1所述的行驶轨迹生成方法,其特征在于,步骤4中,以道路中心线的方向确定右侧车道和左侧车道;确定右侧车道和左侧车道对应的右侧车道方向和左侧车道方向;由右侧车道方向和左侧车道方向确定对应车道的起点方向和终点方向;由车道的起点和终点方向确定车道对应的驶入点位置和驶出点位置。
5.根据权利要求1所述的行驶轨迹生成方法,其特征在于,步骤5中,在每条道路区域的道路中心线设置多个中心节点,按两个对应边的对应节点最短距离原则对右道路边界的右节点和道路中心线的中心节点进行一对一匹配;将一对一匹配的右道路边界的右节点和道路中心线的中心节点连线,取连线的右车道中点;将获取的所有车道中点顺序连成线,获得右道路中心线。
6.根据权利要求1所述的行驶轨迹生成方法,其特征在于,步骤5中,在每条道路区域的道路中心线设置多个中心节点,按两个对应边的对应节点最短距离原则对左道路边界的左节点和道路中心线的中心节点进行一对一匹配;将一对一匹配的左道路边界的左节点和道路中心线的中心节点连线,取连线的车道中点;将获取的所有左车道中点顺序连成线,获得左道路中心线。
7.根据权利要求1所述的行驶轨迹生成方法,其特征在于,步骤6中,使所优化后的道路区域行驶轨迹最小曲率半径不超过无人驾驶车辆的最小转弯半径且不与边界发生碰撞冲突。
8.根据权利要求1所述的行驶轨迹生成方法,其特征在于,步骤7中,确定路口区域边界以及路口区域与道路区域的分界线;在分界线上确定多个拓扑点,并确定为多个所述拓扑点为驶入点还是驶出点;选取不同路口区域的边界线上的驶入点和驶出点,连接不同路口区域的边界线上的驶入点和驶出点的路口区域行驶轨迹;获取路口区域行驶轨迹上的轨迹点。
技术总结本发明涉及一种露天矿山无人驾驶车辆行驶轨迹生成方法,属于无人驾驶车辆矿区高精度地图采集技术领域。本发明的行驶轨迹生成方法采集矿区道路边界及路口边界,并基于序列二次规划方法与几何曲线方法生成道路场景下与路口场景下的行车轨迹,能够满足露天矿山场景下道路高频变更性的同时可以实时生成矿区车辆行驶轨迹,提高矿区车辆行驶轨迹生成速率。生成的车辆行驶轨迹满足车辆动力学要求,易于矿区无人驾驶车辆预瞄跟踪。
技术研发人员:刘意琮,郑宇雷,武奇,张义雨,蒋锟
受保护的技术使用者:北京踏歌智行科技有限公司
技术研发日:技术公布日:2024/1/14