一种用于无人平台导航的仿生偏振光罗盘自适应曝光方法
本申请涉及仿生偏振光导航,特别是涉一种用于无人平台导航的仿生偏振光罗盘自适应曝光方法。
背景技术:
1、近年来,仿生导航逐渐成为国内外研究的热点以及学科交叉的前沿,涉及动物行为学、生理学、微电子、光学工程、微纳制造以及信息技术等多个学科。仿生偏振光罗盘是仿生导航领域的一大研究热点,以沙蚁等动物导航机理为依据,感知天空偏振光并进行实时航向解算,是解决卫星导航信号拒止和数据链失效条件下无人平台高精度长航时自主导航难题的有效技术途径之一。
2、视觉信息是绝大部分动物的主要信息来源,动物在复杂光照条件下的视觉能力比机器要强大的多。对于高动态性的移动平台,光照的变化所带来的过曝、欠曝等现象会导致图像细节丢失,对视觉传感器带来极大的挑战。国内外众多学者对此问题做了大量的工作,提出了自动曝光算法、hdr成像算法等方法,以期解决光照变化所导致的成像效率与成像质量问题,提高视觉传感器在复杂光照条件下的精度与鲁棒性。
3、目前大多数图像传感器都配备了自动曝光算法,常见的自动曝光方法包括:“灰度平均值法”、“信息熵法”与“数值分析法”等方法,大量的研究表明这些方法对于增强图像清晰度、提高图像质量具有良好的效果。仿生偏振光罗盘敏感大气偏振光从而定向,因此光罗盘的定向性能与曝光时间也具有密切的联系。然而,现阶段却鲜有专门针对仿生偏振光罗盘定向的曝光方法研究,现有的自适应曝光方法对于仿生偏振光罗盘是否有效也尚不清楚。在此背景下,开展仿生偏振光罗盘的自适应曝光方法研究,从而提高仿生偏振光罗盘在复杂光照条件下的求解仿生偏振光罗盘的最优曝光时间,从而快速、鲁棒、准确地计算载体航向角具有重要意义。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够求解仿生偏振光罗盘的最优曝光时间的用于无人平台导航的仿生偏振光罗盘自适应曝光方法。
2、一种用于无人平台导航的仿生偏振光罗盘自适应曝光方法,所述方法包括:
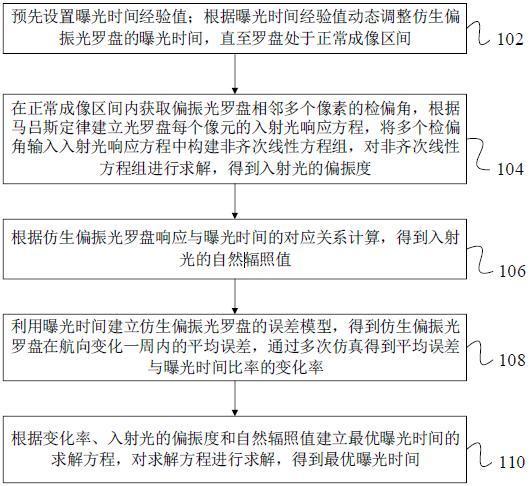
3、预先设置曝光时间经验值;根据曝光时间经验值动态调整仿生偏振光罗盘的曝光时间,直至罗盘处于正常成像区间;
4、在正常成像区间内获取偏振光罗盘相邻多个像素的检偏角,根据马吕斯定律建立光罗盘每个像元的入射光响应方程,将多个检偏角输入入射光响应方程中构建非齐次线性方程组,对非齐次线性方程组进行求解,得到入射光的偏振度;
5、根据仿生偏振光罗盘响应与曝光时间的对应关系计算,得到入射光的自然辐照值;
6、利用曝光时间建立仿生偏振光罗盘的误差模型,得到仿生偏振光罗盘在航向变化一周内的平均误差,通过多次仿真得到平均误差与曝光时间比率的变化率;
7、根据变化率、入射光的偏振度和自然辐照值建立最优曝光时间的求解方程,对求解方程进行求解,得到最优曝光时间。
8、在其中一个实施例中,根据曝光时间经验值动态调整仿生偏振光罗盘的曝光时间,直至罗盘处于正常成像区间,包括:
9、检测仿生偏振光罗盘响应是否超过曝光时间经验值,若大于曝光时间经验值则减小曝光时间,直至罗盘处于正常成像区间,记录当前的曝光时间。
10、在其中一个实施例中,将多个检偏角输入入射光响应方程中构建非齐次线性方程组,对非齐次线性方程组进行求解,得到入射光的偏振度,包括:
11、根据马吕斯定律建立光罗盘每个像元的入射光响应方程,单个偏振信息测量单元视为4个不同检偏角的4次测量求解,整理4次测量方程得到非齐次线性方程组为,其中,为方程的系数矩阵,与相机响应相关,为偏振信息未知量,通过最小二乘法可求解出偏振信息的最优解,分离未知量得到入射光的偏振度。
12、在其中一个实施例中,仿生偏振光罗盘响应与曝光时间的对应关系为,其中,为仿生偏振光罗盘光敏元件的响应函数,为仿生偏振光罗盘当前的曝光时间。
13、在其中一个实施例中,根据仿生偏振光罗盘响应与曝光时间的对应关系计算,得到入射光的自然辐照值,包括:
14、根据仿生偏振光罗盘响应与曝光时间的对应关系计算,得到入射光的自然辐照值为
15、。
16、在其中一个实施例中,利用曝光时间建立仿生偏振光罗盘的误差模型,得到仿生偏振光罗盘在航向变化一周内的平均误差,包括:
17、利用曝光时间建立仿生偏振光罗盘的误差模型,得到仿生偏振光罗盘在航向变化一周内的平均误差为
18、;
19、其中,为偏振角的测角误差,表示测量的偏振角。
20、在其中一个实施例中,平均误差与曝光时间比率的变化率为仿生偏振光罗盘测角误差随曝光时间的增加而减小。
21、在其中一个实施例中,根据变化率、入射光的偏振度和自然辐照值建立最优曝光时间的求解方程,对求解方程进行求解,得到最优曝光时间,包括:
22、根据变化率、入射光的偏振度和自然辐照值建立最优曝光时间的求解方程,对求解方程进行求解,得到最优曝光时间为
23、;
24、其中,为仿生偏振光罗盘的成像最大值,表示入射光的偏振度,表示入射光的自然辐照值。
25、上述一种用于无人平台导航的仿生偏振光罗盘自适应曝光方法,本申请首先动态调整仿生偏振光罗盘的曝光时间,直至罗盘处于正常成像区间,记录当前的曝光时间,利用光罗盘成像结果计算天空偏振度信息,得到入射光的偏振度;再次,结合当前曝光时间和仿生偏振光罗盘响应计算入射光的自然辐照值;利用曝光时间建立仿生偏振光罗盘的误差模型,得到仿生偏振光罗盘在航向变化一周内的平均误差,通过多次仿真得到平均误差与曝光时间比率的变化率,根据变化率、入射光的偏振度和自然辐照值建立最优曝光时间的求解方程,对求解方程进行求解,得到最优曝光时间,提高仿生偏振光罗盘的定向精度,并且本申请流程简单,计算量小,易于编程实现。
技术特征:
1.一种用于无人平台导航的仿生偏振光罗盘自适应曝光方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据所述曝光时间经验值动态调整仿生偏振光罗盘的曝光时间,直至罗盘处于正常成像区间,包括:
3.根据权利要求1所述的方法,其特征在于,将多个所述检偏角输入所述入射光响应方程中构建非齐次线性方程组,对所述非齐次线性方程组进行求解,得到入射光的偏振度,包括:
4.根据权利要求1至3任意一项所述的方法,其特征在于,所述仿生偏振光罗盘响应与曝光时间的对应关系为,其中,为仿生偏振光罗盘光敏元件的响应函数,为仿生偏振光罗盘当前的曝光时间。
5.根据权利要求4所述的方法,其特征在于,根据仿生偏振光罗盘响应与曝光时间的对应关系计算,得到入射光的自然辐照值,包括:
6.根据权利要求1所述的方法,其特征在于,利用曝光时间建立仿生偏振光罗盘的误差模型,得到仿生偏振光罗盘在航向变化一周内的平均误差,包括:
7.根据权利要求1所述的方法,其特征在于,所述平均误差与曝光时间比率的变化率为仿生偏振光罗盘测角误差随曝光时间的增加而减小。
8.根据权利要求7所述的方法,其特征在于,根据所述变化率、入射光的偏振度和自然辐照值建立最优曝光时间的求解方程,对所述求解方程进行求解,得到最优曝光时间,包括:
技术总结
本申请涉及一种用于无人平台导航的仿生偏振光罗盘自适应曝光方法。所述方法包括:动态调整仿生偏振光罗盘的曝光时间,直至罗盘处于正常成像区间,记录当前的曝光时间;利用光罗盘成像结果计算天空偏振度信息;结合当前曝光时间和仿生偏振光罗盘响应计算入射光的自然辐照值;建立基于曝光时间的仿生偏振光罗盘误差模型,求解得到光罗盘的最优曝光时间参数。采用本方法能够求解仿生偏振光罗盘的最优曝光时间,提高仿生偏振光罗盘的定向精度。
技术研发人员:何晓峰,范晨,胡小平,张礼廉,周文舟,范颖,陈云龙
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!