一种移动定位方法和移动定位装置
本发明涉及移动机器人定位与地图构建技术,具体涉及了一种移动定位方法、一种移动定位装置,以及一种计算机可读存储介质。
背景技术:
1、同步定位与建图(simultaneous localization and mapping,slam)是指将机器人放置到未知环境的未知位置,机器人通过自身搭载的传感器,在环境中移动去构建周围环境的地图,同时估计自身在环境中所处的位置。随着技术的快速发展,以及激光雷达所具有的测距范围广、测距精度高和抗干扰性强等优点,激光slam算法已经应用于无人驾驶、移动机器人和无人机等领域,在环境探测,灾害救援等场景发挥着重要作用。
2、激光slam按照使用激光雷达线束不同可以分为2d激光slam和3d激光slam。3d激光slam算法中常用的经典算法有激光雷达测距和测绘算法(lidar odometry and mapping,loam算法),其核心思想是将定位和建图部分进行分割,结合两个算法并行结果就可以获得高精度、实时性的结果。但由于机器人平台的计算能力较弱,loam算法对于嵌入式的移动机器人平台并不是最优的方案。后来提出的lego-loam(lightweight and ground optimizedlider odometry and mapping)算法对loam算法进行了改进,以适应计算能力较弱的嵌入式移动机器人平台。然而,现有技术中,lego-loam算法仍然存在无法有效识别已观测区域,因而不能正常进行回环检测的情况,这种情况仍会导致累计误差增大,且无法消除。
3、为了解决现有技术中存在的上述问题,本领域亟需一种移动定位技术,能够在未知环境中提高移动定位时的精度和实时性,并且还能提高系统有效识别已观测的区域的能力,获得更准确的检测回环,从而减少累计误差。
技术实现思路
1、以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概述不是所有构想到的方面的详尽综览,并且既非旨在指认出所有方面的关键性或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是要以简化形式给出一个或多个方面的一些概念以为稍后给出的更加详细的描述之前序。
2、为了克服现有技术存在的上述缺陷,本发明提供了一种移动定位方法、一种移动定位装置,以及一种计算机可读存储介质,能够在未知环境中提高移动定位时的精度和实时性,并且还能提高系统有效识别已观测的区域的能力,获得更准确的检测回环,从而减少累计误差。
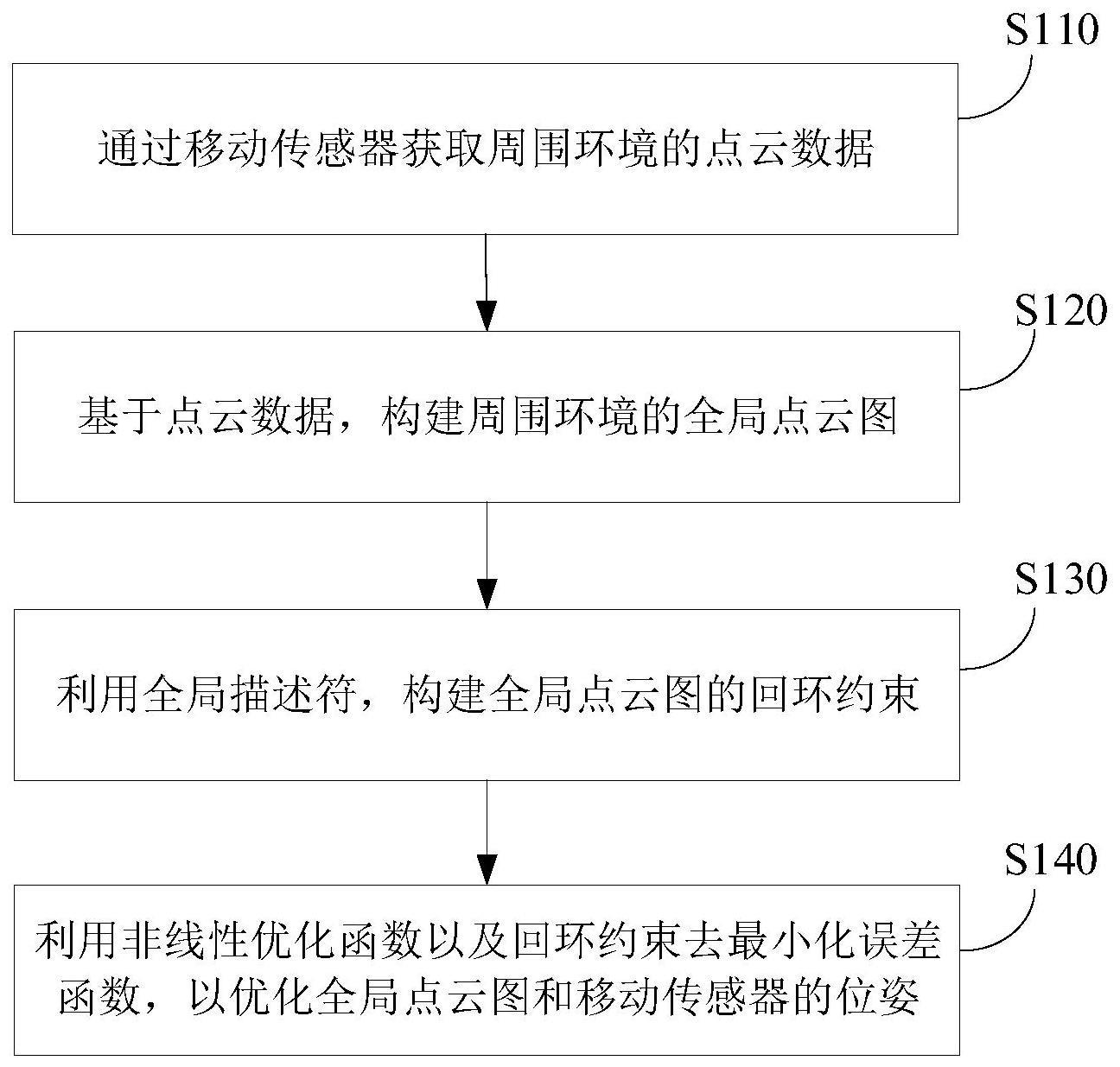
3、具体来说,根据本发明的第一方面提供的上述移动定位方法,包括以下步骤:通过移动传感器获取周围环境的点云数据;基于所述点云数据,构建所述周围环境的全局点云图;利用全局描述符,构建所述全局点云图的回环约束;以及利用非线性优化函数以及所述回环约束去最小化误差函数,以优化所述全局点云图和所述移动传感器的位姿。
4、此外,根据本发明的第二方面提供的上述移动定位装置。该种移动定位装置包括存储器及处理器。该处理器连接该存储器,并被配置用于实施本发明的第一方面提供的上述移动定位方法。
5、此外,根据本发明的第三方面还提供了一种计算机可读存储介质,其上存储有计算机指令。所述计算机指令被处理器执行时,实施本发明的第一方面提供的上述移动定位方法。
技术特征:
1.一种移动定位方法,其特征在于,包括以下步骤:
2.如权利要求1所述的移动定位方法,其特征在于,所述移动传感器包括激光雷达传感器,所述通过移动传感器采集周围环境的点云数据的步骤包括:
3.如权利要求2所述的移动定位方法,其特征在于,所述基于所述点云数据,构建所述周围环境的全局点云图的步骤包括:
4.如权利要求3所述的移动定位方法,其特征在于,所述对所述点云数据进行点云分割的步骤包括:
5.如权利要求4所述的移动定位方法,其特征在于,所述对分割后的点云数据进行特征提取,以获得特征点的步骤包括:
6.如权利要求3所述的移动定位方法,其特征在于,所述基于所述边缘特征点和平面特征点,构建所述周围环境的全局点云图的步骤包括:
7.如权利要求6所述的移动定位方法,其特征在于,所述基于所述边缘特征点和所述平面特征点,估计相邻帧之间的所述移动传感器的位姿变化的步骤包括:
8.如权利要求7所述的移动定位方法,其特征在于,所述根据所述第一约束关系和所述第二约束关系,进行相邻两帧之间的点云匹配,以估计所述移动传感器的位姿变化的步骤包括:
9.如权利要求8所述的移动定位方法,其特征在于,所述将匹配成功的各所述特征点注册到全局点云地图中,以获得所述周围环境的全局点云图的步骤包括:
10.如权利要求1所述的移动定位方法,其特征在于,所述利用全局描述符,构建所述全局点云图的回环约束的步骤包括:
11.如权利要求1所述的移动定位方法,其特征在于,所述利用非线性优化函数以及所述回环约束去最小化误差函数,以优化所述全局点云图和所述移动传感器的位姿的步骤包括:
12.如权利要求11所述的移动定位方法,其特征在于,所述利用非线性优化函数以及所述回环约束去最小化误差函数,以优化所述全局点云图和所述移动传感器的位姿的步骤还包括:
13.一种移动定位装置,其特征在于,包括:
14.一种计算机可读存储介质,其上存储有计算机指令,其特征在于,所述计算机指令被处理器执行时,实施如权利要求1~12中任一项所述的移动定位方法。
技术总结
本发明公开了一种移动定位方法和移动定位装置。该移动定位方法包括以下步骤:通过移动传感器获取周围环境的点云数据;基于所述点云数据,构建所述周围环境的全局点云图;利用全局描述符,构建所述全局点云图的回环约束;以及利用非线性优化函数以及所述回环约束去最小化误差函数,以优化所述全局点云图和所述移动传感器的位姿。通过执行这些步骤,该移动定位方法能够在未知环境中提高移动定位时的精度和实时性,并且还能提高系统有效识别已观测的区域的能力,获得更准确的检测回环,从而减少累计误差。
技术研发人员:和望利,杜文莉,钱锋
受保护的技术使用者:华东理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!