一种具有自校准功能的带方向性检测的触觉传感器
本发明涉及触觉传感器以及mems自校准器件领域,尤指一种具有自校准功能的带方向性检测的触觉传感器。
背景技术:
1、随着人工智能、机器人技术和智能传感技术的不断发展,触觉传感器在机器人应用中有广阔的发展前景。机器人的应用不再是单一的工作模式,人们期望于机器人技术能够实现复杂的人机交互,模拟人类皮肤的感知机制,实现多样化的人类行为模式。
2、根据工作原理,传感器可分为电容式传感器、压阻式传感器、压电式传感器等,与其它类型的触觉传感器相比,压阻式触觉传感器具有结构简单,适合微型化、高灵敏度、抗干扰能力强、频率响应高等特点。压阻式传感器利用压阻硅元件变形产生的电阻变化量检测力信号,应用于机器人领域的压阻硅元件通常嵌入在弹性材料中,提供与物体间的软接触。
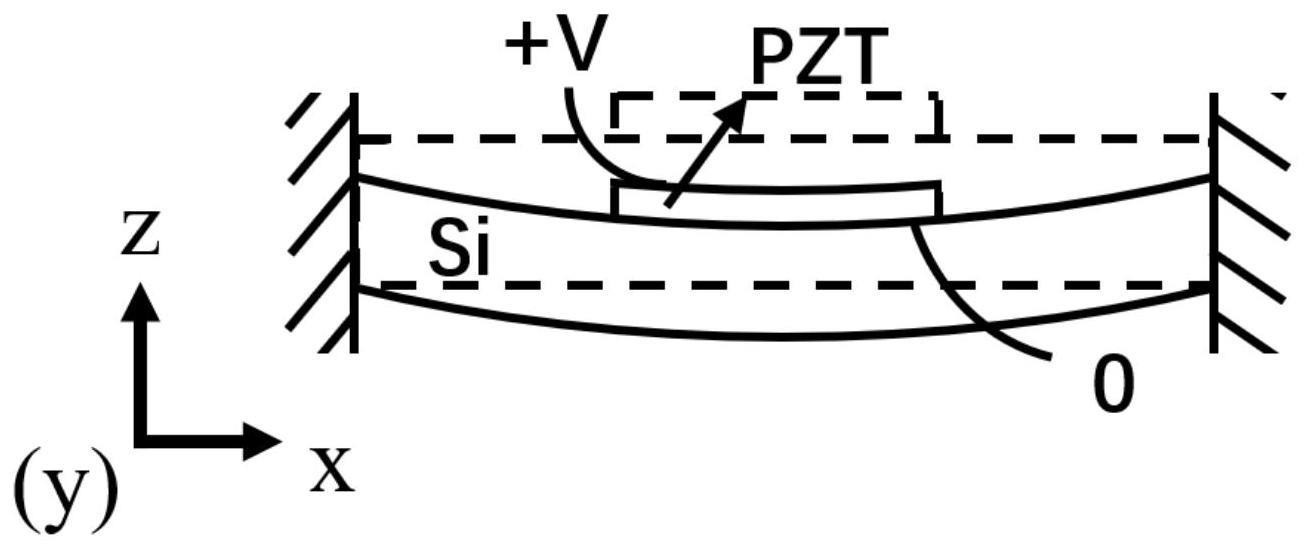
3、触觉传感器受环境温度和噪声的干扰,导致测量的准确性降低,从而影响机器人的操作效果。为保证器件测量的可靠性,器件在投入使用前进行校准以保证触觉传感器测量的准确性。为解决这个问题,近年来出现了自校准技术,用于补偿制造缺陷、温度漂移和老化等问题,在实际应用中提高测量的准确性,实现高性能、高精度的触觉传感器。为实现触觉传感器的自校准功能,通常采用的是压电驱动与力传感器相结合的方法,利用压电材料的逆压电效应,将电信号转换为机械应变,将触觉传感器输出与压电驱动的输出相比较,利用其中的对应关系对触觉传感器进行校准和补偿。
4、在现有技术中,基于mems的触觉传感器基本能够满足机器人手的实际运用需求,实现高灵敏度的触觉传感器。以2016年日本提出的一种基于mems技术的触觉传感器为例,采用上层硅厚度为20um的soi晶片制成硅梁,分别在硅梁的表面和侧壁进行掺杂形成三种仅对本方向应力敏感的压敏电阻,该触觉传感器基本实现自解耦功能。相比于人类指尖触觉,上述触觉传感器虽可以实现对物体触觉信息的感知,但是关于灵敏度这一指标仍有很大的进步空间,且不能判定应力的方向性。在实际应用中考虑测量环境的复杂性和机器人手应用的高精度需求,同时面对传统标定平台大,不宜挪动,操作复杂,工作量大且容易出错,提出一种可自校准的带方向性检测的触觉传感器。
技术实现思路
1、针对现有技术的不足,本发明提供一种具有自校准功能的带方向性检测的触觉传感器。
2、本发明包括力检测模块和位于力检测模块内的自校准模块。
3、所述力检测模块为两种不同类型的硅梁,分别是测量z轴应力的硅梁和测量x/y轴应力的硅梁,其中测量x/y轴应力的硅梁在x/y轴方向正交排列。
4、所述的测量x/y轴应力的硅梁中间部分在x/y轴方向呈圆弧状,在受到某个方向应力时,产生机械应变,此时压敏电阻阻值增加/减少;在受到相反方向的应力作用时,产生机械应变,但压敏电阻阻值的变化趋势相反,从而判断应力的方向性。
5、所述的测量z轴应力的硅梁为直梁,在受到z轴方向应力时产生的机械应变远大于x/y轴方向应力,具有解耦能力。
6、所述的两种不同类型的硅梁在外力作用下产生机械应变,机械应变通过硅梁上方的压敏电阻将力信号转换为电信号,最终通过放大电路输出。
7、所述自校准模块包括压电材料和电极;所述的压电材料分别位于两种不同类型的硅梁上方,利用逆压电效应驱动硅梁产生机械应变,以实现触觉传感器的自校准。
8、本发明的有益效果:该触觉传感器在满足体积小,高精度等需求的同时集成了自校准功能,包括力检测电路模块和自校准模块。力检测模块中测量x/y轴应力的硅梁形状为圆弧状而非传统的直梁,在相同应力作用下可以产生更大的机械应变,从而扩大触觉传感器的灵敏度,并且通过输出的电阻变化量的趋势,对触觉传感器所受外力进行方向检测。自校准模块可以对触觉传感器进行自校准检测,在触觉传感器出现老化或者受到环境影响,输出产生漂移的情况下,可通过自校准模块对触觉传感器进行自校准和误差补偿。
技术特征:
1.一种具有自校准功能的带方向性检测的触觉传感器,包括力检测模块和位于力检测模块内的自校准模块,其特征在于:
2.根据权利要求1所述的一种具有自校准功能的带方向性检测的触觉传感器,其特征在于:两种不同类型的硅梁皆为两端固定的模式。
3.根据权利要求1所述的一种具有自校准功能的带方向性检测的触觉传感器,其特征在于:所述的压电材料采用pzt。
4.根据权利要求3所述的一种具有自校准功能的带方向性检测的触觉传感器,其特征在于:硅梁上的pzt为薄膜形式,其与硅梁之间存在有绝缘层,该pzt薄膜长度为硅梁的一半,宽度与硅梁相同。
5.根据权利要求1、3或4所述的一种具有自校准功能的带方向性检测的触觉传感器,其特征在于:所述的电极包括上电极和下电极,其中测量z轴应力的硅梁上的上电极有一块,测量x/y轴应力的硅梁上的上电极有两块。
6.根据权利要求5所述的一种具有自校准功能的带方向性检测的触觉传感器,其特征在于:测量x/y轴应力的硅梁上的两块上电极所施加的电压大小相同符号相反。
技术总结
本发明公开了一种具有自校准功能的带方向性检测的触觉传感器。本发明包括力检测模块和位于力检测模块内的自校准模块。力检测模块为两种不同类型的硅梁,分别是测量z轴应力的硅梁和测量x/y轴应力的硅梁。自校准模块包括压电材料和电极;压电材料分别位于两种不同类型的硅梁上方,利用逆压电效应驱动硅梁产生机械应变,以实现触觉传感器的自校准。本发明中的测量x/y轴应力的硅梁形状为圆弧状而非传统的直梁,在相同应力作用下可以产生更大的机械应变,从而扩大触觉传感器的灵敏度,并且通过输出的电阻变化量的趋势,对触觉传感器所受外力进行方向检测。还发明还可通过自校准模块对触觉传感器进行自校准和误差补偿。
技术研发人员:董林玺,钟妤馨,胡梦宜,俞挺,刘超然,杨伟煌
受保护的技术使用者:杭州电子科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!