一种建筑底板裂缝的自主扫描检测方法
本发明涉及建筑病害检测,尤其是涉及一种建筑底板裂缝的自主扫描检测方法。
背景技术:
1、在一些建筑结构中,底板是非常重要的部分,需要定期检查开裂等现象。但是在某些特定的应用场景中,人工检测底板结构比较困难且低效,例如桥梁箱梁内部底板,一些建筑物的楼顶,天台等。
2、若采用人工检测的方式,则因为无论是桥梁箱梁内部底板还是楼顶,天台,都存在大面积的待检空间,人工检查过程的劳动强度过高,效率低,成本高,且因为环境恶劣、存在安全隐患,明显给此种区域的裂缝检测带来了极大的阻碍。
3、以此,亟需研发一种可以实现建筑底板裂缝的自主扫描检测方法,解决人工检测的效率问题、安全问题和成本问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种建筑底板裂缝的自主扫描检测方法,仅需远程监控就可实现建筑底板裂缝的自主扫描检测,用户端可以实现多个装置的同时操控,显著提升了检测效率,避免了安全风险,并能够输出带有位置标记的病害图像,便于后续的针对性集中病害修复。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明提供了一种建筑底板裂缝的自主扫描检测方法,包括以下步骤:
4、s1:选取行走组件,并在行走组件上构建包含动力层、控制层、感知层的多层框架式主体结构,得到自主扫描检测装置,并在待检测的建筑底板区域的四角分别设置uwb无线定位基站;
5、s2:通过自主扫描检测装置驶入建筑底板区域中,利用自主扫描检测装置的感知层协同uwb无线定位基站进行行走路径规划;
6、s3:通过自主扫描检测装置遍历规划的行走路径,获取带有位置标记的建筑底板区域的俯视图像;
7、s4:对获取的建筑底板区域的俯视图像进行特征提取,将含有裂缝特征的俯视图像进行标记并发送至用户端。
8、进一步地,s1中,所述选取行走组件时,基于待检测的建筑底板区域的入口情况、空间大小尺寸选择合适尺寸的行走组件;
9、所述行走组件为匹配有麦克纳姆轮和编码电机的小车。
10、进一步地,s1中,所述多层框架式主体结构的尺寸与所述行走组件的尺寸匹配。
11、进一步地,s1中,所述多层框架式主体结构中:
12、所述动力层包括与所述编码电机电连接的蓄电池;
13、所述控制层包括与用户端通信连接的微型电脑、与所述微型电脑电连接的单片机、与所述微型电脑电连接的后台模块;
14、所述单片机与所述编码电机电连接,以此实现自主扫描检测装置按照规划好的路线位移;
15、所述后台模块与所述用户端通信连接。
16、进一步地,s1中,所述多层框架式主体结构中:所述感知层包括与所述微型电脑电连接的激光雷达、深度相机、uwb模块。
17、进一步地,s1中,所述感知层还包括可调节高度支架、设于所述可调节高度支架上的工业摄像机,所述工业摄像机能够的获取正下方地面的图像信息;
18、所述可调节高度支架的高度与建筑底板区域的入口情况、空间大小尺寸相匹配。
19、进一步地,s1中,所述动力层、控制层、感知层自下而上依次设置。
20、进一步地,s2中,通过感知层中通过超宽带无限载波通信(uwb)模块与uwb无线定位基站的配合,使得自主扫描检测装置在待检测的建筑底板区域中遍历式行走一遍,在次过程中通过所述激光雷达和深度相机分别对待检测的建筑底板区域进行融合建图。
21、进一步地,s2中,所述融合建图的过程中,微型电脑实时比对所述激光雷达和深度相机获得的点云特征,对两者偏差超过阈值的位置进行标记,并通过uwb模块获取该位置的坐标位置信息,微型电脑指令单片机进一步控制行走组件在位置反复巡航,直到激光雷达和深度相机获得的点云特征之间的差距小于预设阈值,则保存此时的点云信息。
22、进一步地,s2中,所述行走路径规划过程中,微型电脑基于工业摄像机能够获取的地面图像尺寸,确定在待检测的建筑底板区域的往复次数。
23、与现有技术相比,本发明具有以下技术优势:
24、本技术方案将通过行走组件上集成含动力层、控制层、感知层的多层框架式主体结构,得到自主扫描检测装置,以此作为进行建筑底板裂缝的自主扫描检测主体,并将该自主扫描检测主体置于待检测区域内进行路径规划和裂缝病害获取,以此仅需远程监控就可实现建筑底板裂缝的自主扫描检测,用户端可以实现多个装置的同时操控,显著提升了检测效率,避免了安全风险,降低了实施成本,并能够输出带有位置标记的病害图像,便于后续的针对性集中病害修复。
技术特征:
1.一种建筑底板裂缝的自主扫描检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种建筑底板裂缝的自主扫描检测方法,其特征在于,s1中,所述选取行走组件时,基于待检测的建筑底板区域的入口情况、空间大小尺寸选择合适尺寸的行走组件;
3.根据权利要求1所述的一种建筑底板裂缝的自主扫描检测方法,其特征在于,s1中,所述多层框架式主体结构的尺寸与所述行走组件的尺寸匹配。
4.根据权利要求2所述的一种建筑底板裂缝的自主扫描检测方法,其特征在于,s1中,所述多层框架式主体结构中:
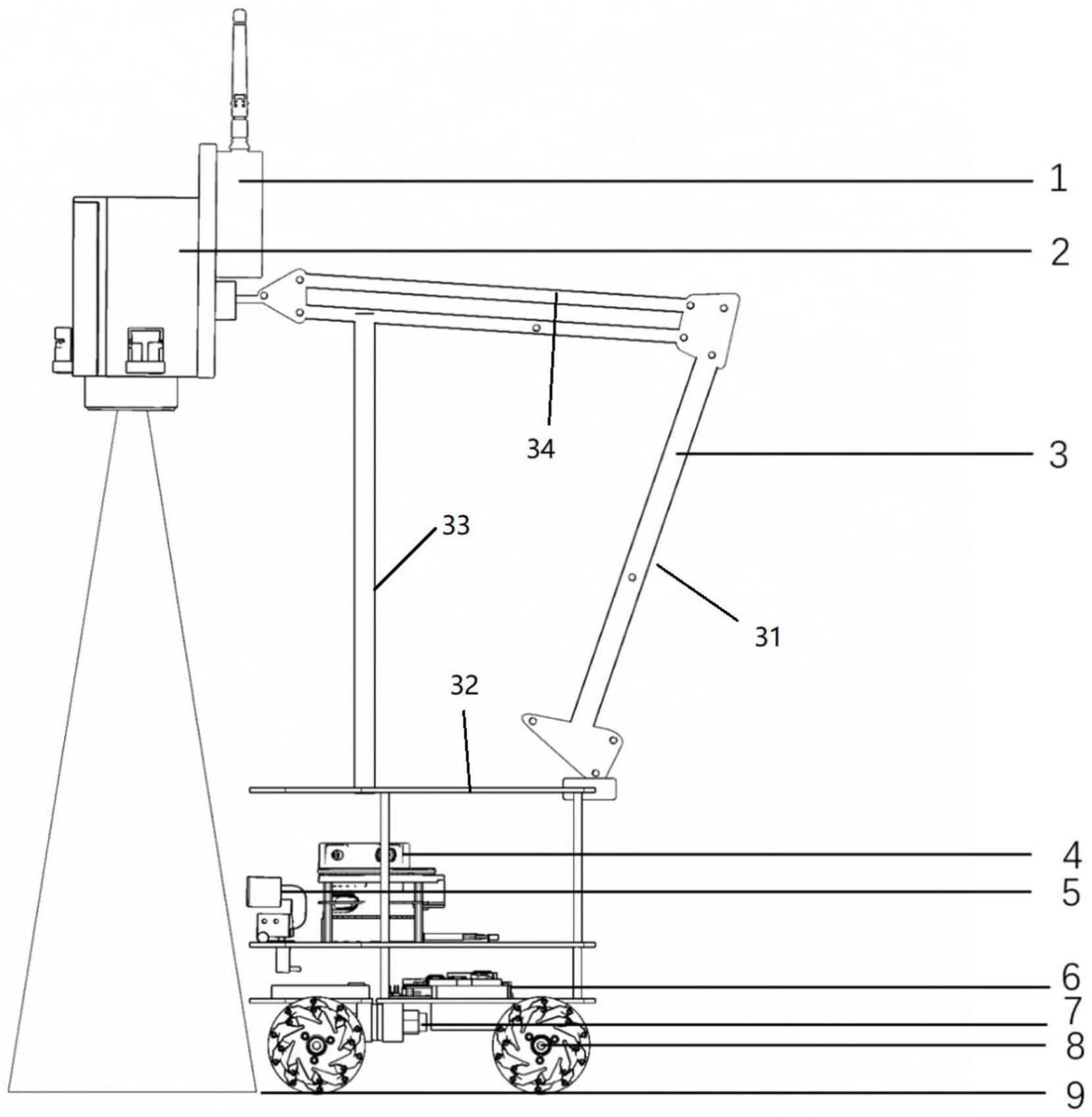
5.根据权利要求4所述的一种建筑底板裂缝的自主扫描检测方法,其特征在于,s1中,所述多层框架式主体结构中:所述感知层包括与所述微型电脑电连接的激光雷达(4)、深度相机(5)、uwb模块(1)。
6.根据权利要求5所述的一种建筑底板裂缝的自主扫描检测方法,其特征在于,s1中,所述感知层还包括可调节高度支架(3)、设于所述可调节高度支架(3)上的工业摄像机(2),所述工业摄像机(2)能够的获取正下方地面的图像信息;
7.根据权利要求1所述的一种建筑底板裂缝的自主扫描检测方法,其特征在于,s1中,所述动力层、控制层、感知层自下而上依次设置。
8.根据权利要求6所述的一种建筑底板裂缝的自主扫描检测方法,其特征在于,s2中,通过感知层中通过uwb模块(1)与uwb无线定位基站的配合,使得自主扫描检测装置在待检测的建筑底板区域中遍历式行走一遍,在次过程中通过所述激光雷达(4)和深度相机(5)分别对待检测的建筑底板区域进行融合建图。
9.根据权利要求8所述的一种建筑底板裂缝的自主扫描检测方法,其特征在于,s2中,所述融合建图的过程中,微型电脑实时比对所述激光雷达(4)和深度相机(5)获得的点云特征,对两者偏差超过阈值的位置进行标记,并通过uwb模块获取该位置的坐标位置信息,微型电脑指令单片机进一步控制行走组件在位置反复巡航,直到激光雷达(4)和深度相机(5)获得的点云特征之间的差距小于预设阈值,则保存此时的点云信息。
10.根据权利要求7所述的一种建筑底板裂缝的自主扫描检测方法,其特征在于,s2中,所述行走路径规划过程中,微型电脑基于工业摄像机(2)能够获取的地面图像尺寸,确定在待检测的建筑底板区域的往复次数。
技术总结
本发明涉及一种建筑底板裂缝的自主扫描检测方法,包括以下步骤:选取行走组件,并在行走组件上构建包含动力层、控制层、感知层的多层框架式主体结构,得到自主扫描检测装置;通过自主扫描检测装置驶入建筑底板区域中,利用自主扫描检测装置的感知层协同UWB无线定位基站进行行走路径规划;通过自主扫描检测装置遍历规划的行走路径,获取带有位置标记的建筑底板区域的俯视图像;对获取的建筑底板区域的俯视图像进行特征提取,将含有裂缝特征的俯视图像进行标记并发送至用户端。与现有技术相比,本发明仅需远程监控就可实现建筑底板裂缝的自主扫描检测,显著提升了检测效率,并能够输出带有位置标记的病害图像,便于后续的针对性集中病害修复。
技术研发人员:郭跃,王达磊,潘玥,崔屿杰,肖子恒,李路瑶,季马泽宇
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!