自移动设备的传感器标定方法及自移动设备与流程
本发明涉及自移动设备,具体涉及一种自移动设备的传感器标定方法及自移动设备。
背景技术:
1、现有机器人通常设有多个传感器采集环境数据,根据环境数据执行定位操作,比如多个传感器包括激光雷达与惯性检测单元(inertial measurement unit,imu)。多个传感器的时间通常不一致或者传感器在采集数据时容易出现尺度偏差,导致机器人容易出现定位错误。
2、相关技术提供的机器人在投入使用之前,需要借助外部设备对传感器进行标定,比如标定惯性检测单元时,需要将惯性检测单元固定在高精度转台上,控制高精度转台边旋转边收集惯性检测单元的检测参数,根据检测参数生成标定参数,此种标定方法的效率较低。
技术实现思路
1、本发明实施例的一个目的旨在提供一种自移动设备的传感器标定方法及自移动设备,旨在解决相关技术的标定效率较低的技术问题。
2、在第一方面,本发明实施例提供一种自移动设备的传感器标定方法,包括:
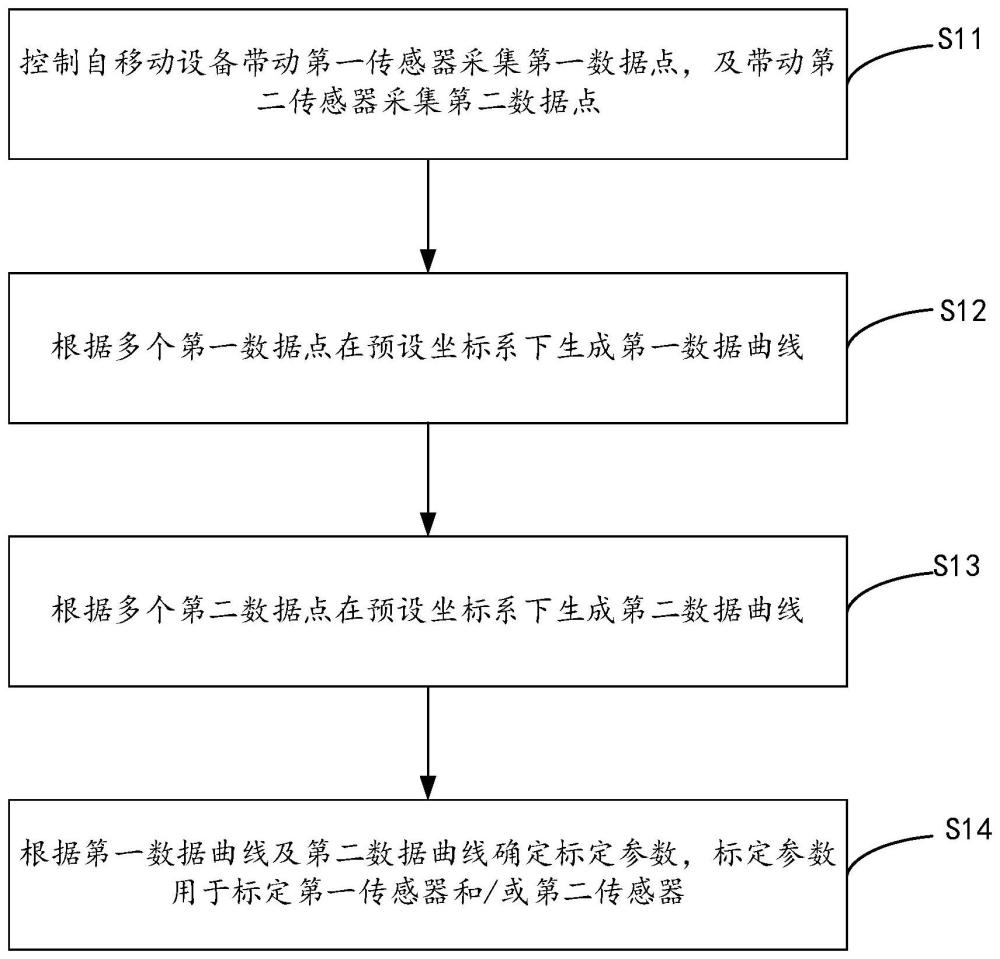
3、控制所述自移动设备带动第一传感器采集第一数据点,及带动第二传感器采集第二数据点;
4、根据多个所述第一数据点在预设坐标系下生成第一数据曲线;
5、根据多个所述第二数据点在所述预设坐标系下生成第二数据曲线;
6、根据所述第一数据曲线及所述第二数据曲线确定标定参数,所述标定参数用于标定所述第一传感器和/或所述第二传感器。
7、可选地,所述根据所述第一数据曲线及所述第二数据曲线确定标定参数包括:
8、根据所述第一数据曲线及所述第二数据曲线构建标定损失函数,所述标定损失函数为关于标定参数的损失函数;
9、根据所述标定损失函数及预设非线性算法确定标定参数。
10、可选地,所述根据所述第一数据曲线及所述第二数据曲线构建标定损失函数包括:
11、根据所述第一数据曲线确定参考数据点,所述参考数据点为所述第一数据曲线上的任一个第一数据点;
12、根据所述第二数据曲线确定与所述参考数据点满足距离筛选条件的第二数据点为目标数据点;
13、根据所述参考数据点及所述目标数据点构建标定损失函数。
14、可选地,所述根据所述第二数据曲线确定与所述参考数据点满足距离筛选条件的第二数据点为目标数据点包括:
15、根据所述第二数据曲线确定k维度树;
16、根据所述k维度树确定与所述参考数据点最近的至少一个第二数据点为目标数据点。
17、可选地,所述根据所述参考数据点及所述目标数据点构建标定损失函数包括:
18、确定目标直线的直线方程,所述目标直线为至少两个所述目标数据点形成的直线;
19、根据所述直线方程计算所述参考数据点到目标切线的点线距离;
20、根据所述点线距离构建标定损失函数。
21、可选地,所述第一数据点为第一偏航角度,所述根据多个所述第一数据点生成在预设坐标系下的第一数据曲线包括:根据预设平滑算法,在预设坐标系下对多个所述第一数据点进行平滑处理以得到第一数据曲线;
22、所述第二数据点为第二偏航角度,所述根据多个所述第二数据点生成在预设坐标系下的第二数据曲线包括:根据预设平滑算法,在预设坐标系下对多个所述第二数据点进行平滑处理以得到第二数据曲线。
23、可选地,所述控制所述自移动设备带动第一传感器采集第一数据点,及带动第二传感器采集第二数据点包括:
24、控制所述自移动设备按照指定旋转动作带动第一传感器及第二传感器进行旋转,以得到第一数据点及第二数据点,其中,所述指定旋转动作包括所述自移动设备原地左右摆动指定角度后,再按照指定旋转方向旋转指定圈数。
25、可选地,所述标定参数包括时间偏差和/或尺度偏差;
26、所述第一数据点的时间约等于第二数据点的时间与时间偏差的和;
27、所述第一数据点的尺度约等于第二数据点的尺度与尺度偏差的乘积。
28、在第二方面,本发明实施例提供一种非易失性可读存储介质,其特征在于,存储有计算机可执行指令,所述计算机可执行指令用于使自移动设备执行上述的自移动设备的传感器标定方法。
29、在第三方面,本发明实施例提供一种自移动设备,包括:
30、至少一个处理器;以及,
31、与所述至少一个处理器通信连接的存储器;其中,
32、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的自移动设备的传感器标定方法。
33、在本发明实施例提供的自移动设备的传感器标定方法中,首先,本实施例控制自移动设备带动第一传感器采集第一数据点,及带动第二传感器采集第二数据点,根据多个第一数据点生成在预设坐标系下的第一数据曲线,根据多个第二数据点生成在预设坐标系下的第二数据曲线,因此,本实施例能够将第一数据点及第二数据点转换至同一维度的预设坐标系下,构建第一数据点与第二数据点之间的约束关系,以便推导出标定参数。接着,本实施例根据第一数据曲线及第二数据曲线确定标定参数,标定参数用于标定第一传感器和/或第二传感器,因此,本实施例在上述标定过程中无需依赖外部设备,基于第一数据曲线与第二数据曲线在同一维度的预设坐标系下便可有效地自动推导出标定参数,减少标定过程的人工参与,有利于提高标定效率。
技术特征:
1.一种自移动设备的传感器标定方法,其特征在于,包括:
2.根据权利要求1所述的传感器标定方法,其特征在于,所述根据所述第一数据曲线及所述第二数据曲线确定标定参数包括:
3.根据权利要求2所述的传感器标定方法,其特征在于,所述根据所述第一数据曲线及所述第二数据曲线构建标定损失函数包括:
4.根据权利要求3所述的传感器标定方法,其特征在于,所述根据所述第二数据曲线确定与所述参考数据点满足距离筛选条件的第二数据点为目标数据点包括:
5.根据权利要求3所述的传感器标定方法,其特征在于,所述根据所述参考数据点及所述目标数据点构建标定损失函数包括:
6.根据权利要求1所述的传感器标定方法,其特征在于,
7.根据权利要求1所述的传感器标定方法,其特征在于,所述控制所述自移动设备带动第一传感器采集第一数据点,及带动第二传感器采集第二数据点包括:
8.根据权利要求1至7任一项所述的传感器标定方法,其特征在于,
9.一种非易失性可读存储介质,其特征在于,存储有计算机可执行指令,所述计算机可执行指令用于使自移动设备执行如权利要求1至8任一项所述的自移动设备的传感器标定方法。
10.一种自移动设备,其特征在于,包括:
技术总结
本发明涉及自移动设备技术领域,公开了一种自移动设备的传感器标定方法及自移动设备。本实施例控制自移动设备采集第一数据点及第二数据点,根据第一数据点及第二数据点生成第一数据曲线及第二数据曲线,因此,本实施例能够将第一数据点及第二数据点转换至同一维度的预设坐标系下,构建第一数据点与第二数据点的约束关系,以便推导出标定参数。接着,本实施例根据第一数据曲线及第二数据曲线确定标定参数,标定参数用于标定第一传感器和/或第二传感器,因此,本实施例在上述标定过程中无需依赖外部设备,基于第一数据曲线与第二数据曲线在同一维度的预设坐标系下便可有效地自动推导出标定参数,减少标定过程的人工参与,有利于提高标定效率。
技术研发人员:赵勇,苏贇,阳方平,李勇
受保护的技术使用者:广州视源电子科技股份有限公司
技术研发日:
技术公布日:2024/12/12
- 还没有人留言评论。精彩留言会获得点赞!