一种移动机器人无碰撞环境探索的路径概率形成方法与流程
本发明属于移动机器人,尤其涉及一种移动机器人无碰撞环境探索的路径概率形成方法。
背景技术:
1、随着经济的发展和机器人技术的不断进步,移动机器人在许多行业逐渐替代了传统的人力配送与驾驶,其中保证移动机器人无碰撞行驶的高可靠性是研究的基础与重点。在复杂的城市道路交通中,移动机器人的安全行驶需要对道路情况有一个高可靠性的预测。大多数的道路交通流量预测方法都是基于点预测来实现。不同于点预测,概率预测则能够提供预测目标的分布信息,这些分布信息能够为移动机器人行驶路径提供有力的数据支撑,降低因预测不确定性带来的碰撞损失与风险。现有的概率预测方法可以分为参数方法与非参数方法,参数方法一般需要先假设数据服从某种先验分布。但是,在数据分析过程中往往无法对总体分布形态作简单假定,因此非参数方法更适用于交通流量概率预测,非参数核密度估计常用于各种概率预测任务,而核密度估计主要的关键点就是确定带宽值,应用最广泛的带宽选择方法为rot法则,但该法则是建立在数据分布服从正态分布的前提下的,对于复杂的道路环境适用性不高。
技术实现思路
1、本发明的目的在于提供一种移动机器人无碰撞环境探索的路径概率形成方法。旨在解决移动机器人在行驶中对道路交通流使用概率预测时,rot法则在复杂道路的环境中适应性不高的问题。
2、一方面,本发明提供了一种移动机器人无碰撞环境探索的路径概率形成方法,所述方法包括以下步骤:
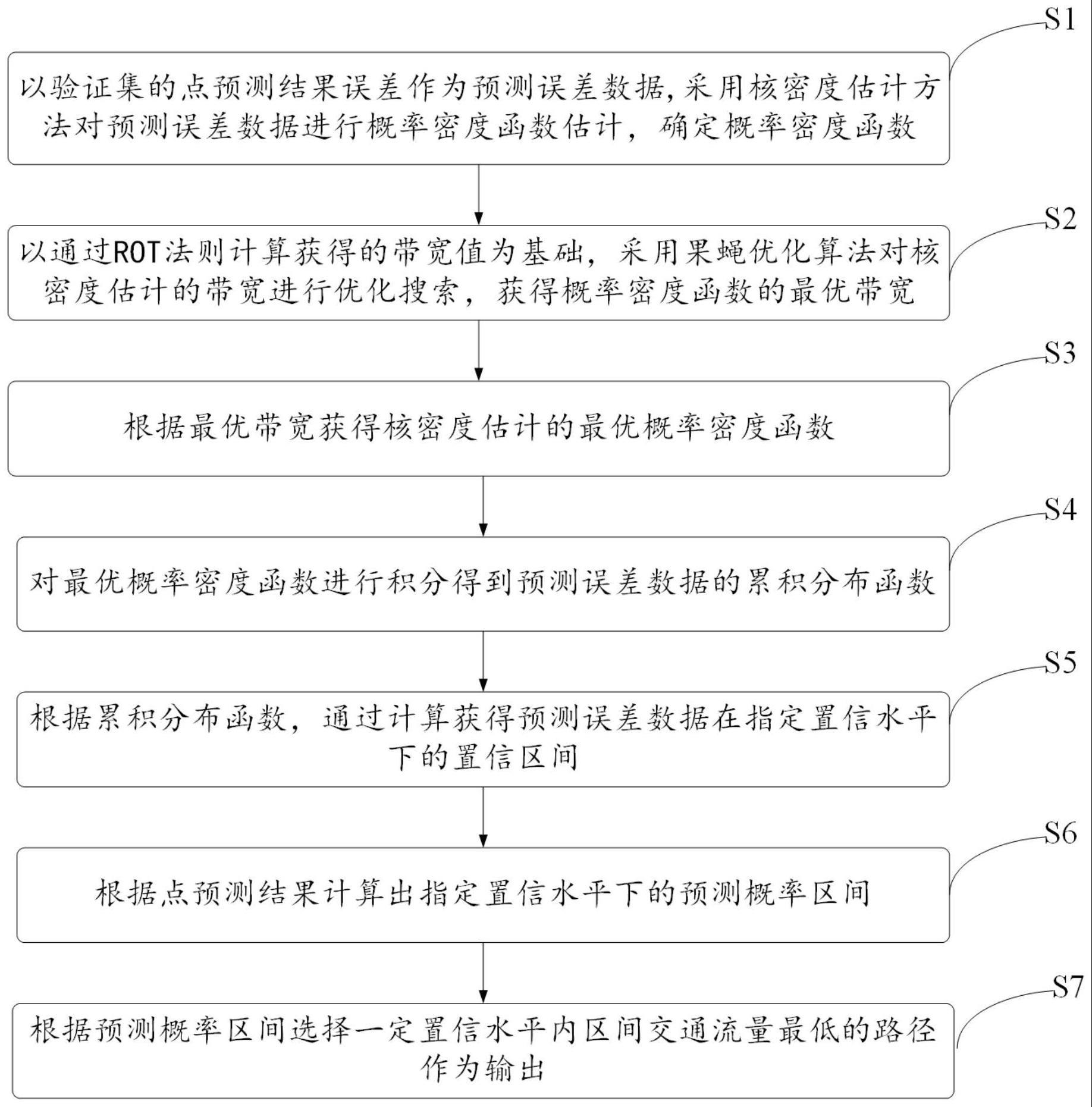
3、以验证集的点预测结果误差作为预测误差数据,采用核密度估计方法对所述预测误差数据进行概率密度函数估计,确定概率密度函数;
4、以通过rot法则计算获得的带宽值为基础,采用果蝇优化算法对核密度估计的带宽进行优化搜索,获得所述概率密度函数的最优带宽;
5、根据最优带宽获得核密度估计的最优概率密度函数;
6、对所述最优概率密度函数进行积分得到预测误差数据的累积分布函数;
7、根据所述累积分布函数,通过计算获得预测误差数据在指定置信水平下的置信区间;
8、根据点预测结果计算出指定置信水平下的预测概率区间;
9、根据所述预测概率区间选择一定置信水平内区间交通流量最低的路径作为输出。
10、进一步地,所述概率密度函数的表达式为:
11、
12、其中,核函数k为高斯核函数,h为带宽。
13、进一步地,所述用果蝇优化算法进行优化搜索包括以下步骤:
14、步骤1、初始化算法参数,包括最大迭代次数和种群规模,根据预先获得的通过rot法则计算得到的带宽值初始化果蝇群体位置;
15、步骤2、以随机方向和距离利用嗅觉搜寻果蝇个体,更新公式如下所示:
16、x(t+1)=x(t)+randomvaluex
17、y(t+1)=y(t)+randomvaluey
18、其中,randomvalue是果蝇个体每一维的搜索随机距离,(x(t),y(t))是果蝇上一时刻的位置;
19、步骤3、采用欧氏距离估算果蝇个体与原点的距离,将距离的倒数设为浓度判别值,将浓度判别值代入目标函数得到果蝇感知到的浓度值,浓度值的计算过程如下所示:
20、
21、
22、smelli=fun(si)
23、其中,fun()表示目标函数,表达式为:
24、
25、s.t.h∈(0,5]
26、
27、
28、其中,fi*(x)为根据核密度估计结果而得到的第i个预测误差数据的累积分布函数;h(x-xi)为heaviside函数;
29、步骤4、对果蝇群体的浓度值smell进行排序,找到群体中浓度值最佳的果蝇个体,若比目前的最优浓度值更优,则保存并标记该最佳浓度值与其坐标,与此同时果蝇群体位置变为最佳浓度对应的位置,若达到最大迭代次数或目标函数值达到预定精度,则当前最优的浓度判别值为最优带宽,否则,继续迭代寻优。
30、进一步地,所述累积分布函数的表达式为:
31、
32、进一步地,所述预测误差数据在指定置信水平下的置信区间的表达式为:
33、
34、其中:表示置信水平为100(1-α)%下的预测区间的下界点;表示置信水平为100(1-α)%下的预测区间的上界点。
35、进一步地,所述指定置信水平下的预测概率区间的表达式如下:
36、
37、
38、其中:和为置信水平为100(1-α)%下的概率区间的上下界,yi,pre表示电动汽车充电负荷点预测模型在i时刻的预测结果。
39、进一步地,所述验证集的点预测结果误差的获取方法包括以下步骤:
40、对数据集利用箱线图进行异常数据检测,进行归一化数理;
41、采用预测模型输出点预测结果,所述预测模型为编码器-解码器模型;
42、通过点预测结果获得点预测结果误差数据集;
43、从所述点预测结果误差数据集中获取验证集的点预测结果误差。
44、另一方面,本文还提供了一种移动机器人无碰撞环境探索的路径概率形成系统,所述系统包括:
45、概率密度函数确定模块,用于以验证集的点预测结果误差作为预测误差数据,采用核密度估计方法对所述预测误差数据进行概率密度函数估计,确定概率密度函数;
46、最优带宽获取模块,用于以通过rot法则计算获得的带宽值为基础,采用果蝇优化算法对核密度估计的带宽进行优化搜索,获得所述概率密度函数的最优带宽;
47、最优概率密度函数获取模块,用于根据所述最优带宽获得核密度估计的最优概率密度函数;
48、累积分布函数获取模块,用于根据所述最优概率密度函数通过积分得到预测误差数据的累积分布函数;
49、置信区间获取模块,用于通过计算获得预测误差数据在指定置信水平下的置信区间;
50、概率预测区间获取模块,用于根据点预测结果计算出指定置信水平下的预测概率区间;
51、输出模块,用于根据所述预测概率区间选择一定置信水平内区间交通流量最低的路径。
52、本发明的有益效果:本发明针对机器人在行驶中对道路交通流使用概率预测时,rot法则在复杂道路的环境中适应性不高的问题,提出了一种移动机器人无碰撞环境探索的路径概率形成方法,本发明通过使用概率预测的方式对道路交通流进行预测,并将非参数核密度估计应用于概率预测任务中,在对核密度估计中的主要关键点带宽值进行计算时,在通过rot法则计算获得的带宽值的基础上,采用基于果蝇优化的启发式算法选择最优带宽,从而减轻rot法则下假设正态分布与数据分布不符的矛盾带来的影响,并生成相应置信水平下的预测概率区间,为移动机器人的安全行驶提供了更高的可靠性。
技术特征:
1.一种移动机器人无碰撞环境探索的路径概率形成方法,其特征在于,所述方法包括:
2.根据权利要求1所述的移动机器人无碰撞环境探索的路径概率形成方法,其特征在于,所述概率密度函数的表达式为:
3.根据权利要求2所述的移动机器人无碰撞环境探索的路径概率形成方法,其特征在于,所述用果蝇优化算法进行优化搜索包括以下步骤:
4.根据权利要求3所述的移动机器人无碰撞环境探索的路径概率形成方法,其特征在于,所述累积分布函数的表达式为:
5.根据权利要求4所述的移动机器人无碰撞环境探索的路径概率形成方法,其特征在于,所述预测误差数据在指定置信水平下的置信区间的表达式为:
6.根据权利要求5所述的移动机器人无碰撞环境探索的路径概率形成方法,其特征在于,所述指定置信水平下的预测概率区间的表达式如下:
7.根据权利要求1所述的移动机器人无碰撞环境探索的路径概率形成方法,其特征在于,所述验证集的点预测结果误差的获取方法包括以下步骤:
8.一种移动机器人移动机器人无碰撞环境探索的路径概率形成系统,其特征在于,包括以下模块:
技术总结
本发明适用于移动机器人技术领域,提供了一种移动机器人无碰撞环境探索的路径概率形成方法,该方法使用概率预测的方式对道路交通流进行预测,并将非参数核密度估计应用于概率预测任务中,在对核密度估计中的主要关键点带宽值进行计算时,在ROT法则计算得到的带宽值的基础上,采用果蝇优化算法对核密度估计的带宽进行进一步优化,减轻了ROT法则下假设正态分布与数据分布不符带来的影响,生成了相应置信水平下的概率区间,为移动机器人的安全行驶提供了更高的可靠性。
技术研发人员:胡丽仪
受保护的技术使用者:深圳市普蓝机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!