一种产品外观检测用复合机器人的制作方法
本发明涉及产品检测机器人,具体地,涉及一种产品外观检测用复合机器人。
背景技术:
1、产品检测机器人是一种使用人工智能和机器视觉技术的机器人,用于执行产品质量控制和检测任务。这些机器人通常用于制造业和生产线上,可以自动执行检测任务,以确保产品符合预定的质量标准和规范,它们能够检测表面缺陷、裂纹、瑕疵、不良组装等问题,并将检测结果记录下来。实现产品外观的检测反馈。
2、然而,传统的产品外观检测用机器人还存在一定的问题,其传统产品外观检测机器人通常是安装在产品输送线上,针对产品输送过程中的外观进行图像检测,而输送线通常是从一端到另一端的线性输送,使产品外观检测机器人的图像采集视角有限,无法全面捕捉产品的外观信息,并且,在需要对产品外观进行拍照检测时,通常需要人工操作检测相机进行拍照记录,缺乏自动化和智能化的特点。
技术实现思路
1、本发明的目的在于提供一种产品外观检测用复合机器人,以解决上述背景技术中提出的问题。
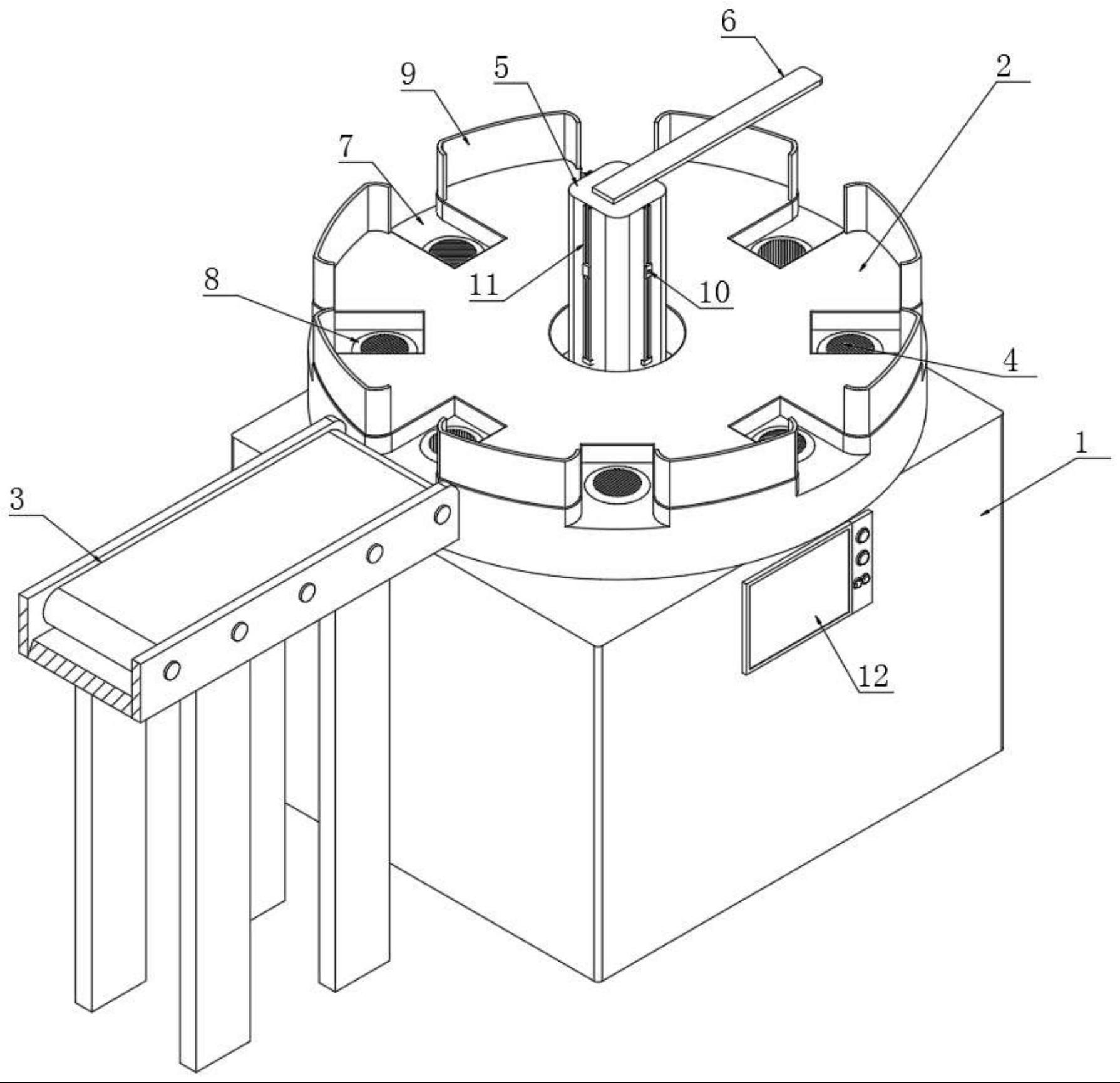
2、为实现上述目的,本发明提供如下技术方案:一种产品外观检测用复合机器人,包括机架,所述机架的一侧安装有输送带;所述机架的顶部嵌装有支承转盘,所述支承转盘的内圈固定连接有转筒,所述转筒的顶部一端固定连接有转台,所述转台的顶部按圆周分布设有多个产品放置槽,所述转筒的底部一端固定连接有第二齿圈,所述机架的内壁安装有电机,所述电机的转动轴固定连接有第一齿轮,所述第一齿轮与所述第二齿圈相啮合;所述转筒的内部贯穿有立柱,所述立柱的底部一端固定连接于所述机架的底部内壁,所述立柱的外壁对称安装有四个滑轨,所述滑轨上通过滑块安装有第一ccd相机,所述立柱的顶部固定连接有横板,所述横板远离所述立柱的一侧底部安装有第二ccd相机。
3、优选的,所述转台的底部安装有霍尔传感器,所述机架的顶部按圆周分布设有多个电磁线圈,所述电磁线圈的数量与所述产品放置槽的数量相匹配。
4、优选的,所述产品放置槽的内部嵌装有轴承,所述轴承的内圈固定连接有转杆,所述转杆的顶部一端固定连接有圆盘没所述转杆的底部一端固定连接有第二齿轮,所述机架的顶部固定连接有固定筒,所述转筒位于所述固定筒的内部,所述固定筒的外壁固定连接有第一齿圈,所述第一齿圈与所述第二齿轮相啮合。
5、优选的,所述机架的内部安装有控制柜,所述控制柜内集成有单片机。
6、优选的,所述机架的一侧安装有触控面板。
7、优选的,所述单片机分别与所述第一ccd相机、所述第二ccd相机、所述电机、所述触控面板和所述电磁线圈电连接,所述单片机分别与所述第一ccd相机、所述第二ccd相机和所述霍尔传感器信号连接。
8、优选的,所述圆盘的顶部设有若干个等距排列的防滑纹。
9、优选的,所述第一齿圈的顶部对称设有三个腰型槽。
10、优选的,所述转台的顶部按圆周分布设有多个挡板。
11、优选的,所述横板的长度大于所述转台的半径。
12、与现有技术相比,本发明的有益效果是:
13、1、本发明使用时,通过启动电机能够驱动转台进行转动,使待检测产品通过立柱四个面上的第一ccd相机进行画面实时采集传输,并在转筒转动时,转台内的第二齿轮能够与固定筒外壁的第一齿圈相啮合,使产品能够在圆盘上进行自转,使第一ccd相机以及第二ccd相机对产品采集的视角能够大幅提升,从而更加全面地对产品表面进行画面实时采集传输。
14、2、本发明中的转台进行转动时,底部的霍尔传感器经过启动状态下的电磁线圈时能够产生电信号,单片机能够实时接收该电信号,并在每次接收时控制第一ccd相机以及第二ccd相机对产品外观进行单独拍照,从而更加详细地传输记录产品多角度多图像数据,实现产品多角度智能拍照检测。
15、3、在本发明中,单片机能够对电机、第一ccd相机、第二ccd相机和电磁线圈的运行状态进行控制,并且相机的检测画面能够实时传输至触控面板中进行显示,实现产品外观的全自动图形检测,提高了产品外观检测的自动化程度。
16、4、本发明中的转台搭配产品放置槽能够在产品不进行外观检测时,还能够利用产品放置槽进行多产品转运输送,使本发明具备实现多功能用途。
技术特征:
1.一种产品外观检测用复合机器人,包括机架(1),所述机架(1)的一侧安装有输送带(3),其特征在于:
2.根据权利要求1所述的一种产品外观检测用复合机器人,其特征在于:所述转台(2)的底部安装有霍尔传感器(14),所述机架(1)的顶部按圆周分布设有多个电磁线圈(15),所述电磁线圈(15)的数量与所述产品放置槽(7)的数量相匹配。
3.根据权利要求2所述的一种产品外观检测用复合机器人,其特征在于:所述产品放置槽(7)的内部嵌装有轴承(27),所述轴承(27)的内圈固定连接有转杆(25),所述转杆(25)的顶部一端固定连接有圆盘(8)没所述转杆(25)的底部一端固定连接有第二齿轮(26),所述机架(1)的顶部固定连接有固定筒(24),所述转筒(23)位于所述固定筒(24)的内部,所述固定筒(24)的外壁固定连接有第一齿圈(16),所述第一齿圈(16)与所述第二齿轮(26)相啮合。
4.根据权利要求2所述的一种产品外观检测用复合机器人,其特征在于:所述机架(1)的内部安装有控制柜(18),所述控制柜(18)内集成有单片机(19)。
5.根据权利要求4所述的一种产品外观检测用复合机器人,其特征在于:所述机架(1)的一侧安装有触控面板(12)。
6.根据权利要求5所述的一种产品外观检测用复合机器人,其特征在于:所述单片机(19)分别与所述第一ccd相机(10)、所述第二ccd相机(13)、所述电机(20)、所述触控面板(12)和所述电磁线圈(15)电连接,所述单片机(19)分别与所述第一ccd相机(10)、所述第二ccd相机(13)和所述霍尔传感器(14)信号连接。
7.根据权利要求3所述的一种产品外观检测用复合机器人,其特征在于:所述圆盘(8)的顶部设有若干个等距排列的防滑纹(4)。
8.根据权利要求3所述的一种产品外观检测用复合机器人,其特征在于:所述第一齿圈(16)的顶部对称设有三个腰型槽(17)。
9.根据权利要求1所述的一种产品外观检测用复合机器人,其特征在于:所述转台(2)的顶部按圆周分布设有多个挡板(9)。
10.根据权利要求1所述的一种产品外观检测用复合机器人,其特征在于:所述横板(6)的长度大于所述转台(2)的半径。
技术总结
本发明公开了一种产品外观检测用复合机器人,包括机架,所述机架的一侧安装有输送带;所述机架的顶部嵌装有支承转盘,所述支承转盘的内圈固定连接有转筒,所述转筒的顶部一端固定连接有转台,所述转台的顶部按圆周分布设有多个产品放置槽,所述转筒的底部一端固定连接有第二齿圈;本发明使用时,通过启动电机能够驱动转台进行转动,使待检测产品通过立柱四个面上的第一ccd相机进行画面实时采集传输,并在转筒转动时,转台内的第二齿轮能够与固定筒外壁的第一齿圈相啮合,使产品能够在圆盘上进行自转,使第一ccd相机以及第二ccd相机对产品采集的视角能够大幅提升,从而更加全面地对产品表面进行画面实时采集传输。
技术研发人员:刘涛,郭帅
受保护的技术使用者:西西泰克(江苏)智能装备有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!