整车气囊误作用试验方法与流程
本发明涉及汽车被动安全的测试,特别是涉及一种整车气囊误作用试验方法。
背景技术:
1、安全气囊是汽车被动安全的重要组成部分,在整车发生碰撞时,能有效地保护乘员,减少乘员伤害。国内现行的标准gb/t37474-2019《汽车安全气囊系统误作用试验的方法和要求》中,推荐了5种室内开展的静态工况和3种低速路障工况以及5种常见粗糙路面工况的气囊误作用试验方法。但目前,该上述推荐用试验的动态测试方法中,一般需要测试人员主动在车内精准地控制车速和制动时刻,这增加了测试者的工作强度和身体符合,轻易造成测试者的身体受伤,而且通过人工操作容易造成速度不够精准和制动时机不准,影响测试的结果。
技术实现思路
1、本发明的目的是:提供一种整车气囊误作用试验方法,有利于采集试验研发用的气囊误作用的车身数据,同时能避免对人员的伤害,保护试验设施和最大程度地减少试验车的维修成本,进一步保证了测试结果的准确性。
2、为了实现上述目的,本发明提供了一种整车气囊误作用试验方法,包括以下步骤:
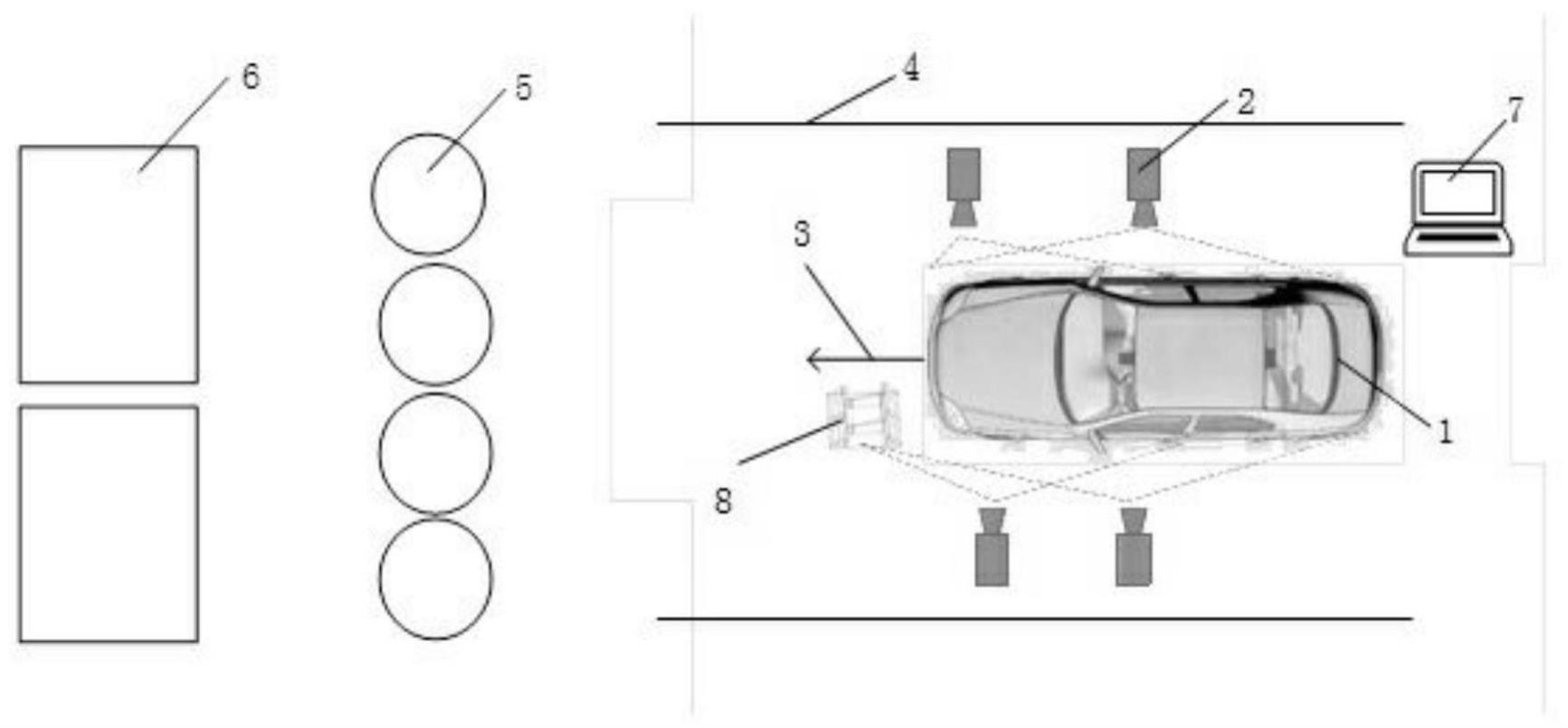
3、进行场地的布置,确认碰撞区域,并在碰撞区域进行路障的安装布置和缓冲件的摆放;
4、调试车辆状态,进行所述车辆的牵引布置;
5、在所述车辆上安装采集装置;
6、在所述场地的外围布置朝向所述路障设置的摄像机;
7、在所述车辆的车内设置制动机器人以约束方向盘和控制制动踏板;
8、车辆经过牵引,朝向路障移动,进行与所述路障进行碰撞测试;
9、收集碰撞后的数据,完成数据分析,并进行试验场地的恢复。
10、本发明实施例一种整车气囊误作用试验方法与现有技术相比,其有益效果在于:本申请的整车气囊误作用试验方法通过制动机器人实现车辆的方向盘的直线保持和制动踏板的自动制动,制动机器人可根据车速和提前设置的程序对车辆进行自动制动,也可在车外直接控制制动时机,无需测试人员在车内控制车速和制动时刻,保证了整车在外部驱动力的牵引下脱钩后,在各种直线碰撞工况下均可平稳精准地减速至停车,有利于采集试验研发用的气囊误作用的车身数据,同时能避免对人员的伤害,保护试验设施和最大程度地减少试验车的维修成本,进一步保证了测试结果的准确性。
11、本发明实施例的整车气囊误作用试验方法,在所述路障的安装布置和缓冲件的摆放步骤中,所述路障包括方块、楔块或横梁,所述缓冲件包括缓冲轮胎和防护墩。
12、本发明实施例的整车气囊误作用试验方法,在所述调试车辆状态的步骤,包括卸除整车aeb、卸除转向助力功能、校核整车质量状态、检查胎压和屏蔽约束系统的气囊作用。
13、本发明实施例的整车气囊误作用试验方法,在所述车辆上安装采集装置的步骤,包括在车身上安装加速度传感器和车载记录仪,所述加速度传感器和车载记录仪连接有数据采集设备。
14、本发明实施例的整车气囊误作用试验方法,在所述场地的外围布置朝向所述路障设置的摄像机的步骤,包括在所述车辆和所述路障碰撞的区域布置高速摄像机,并在通过数据采集设备调试所述高速摄像机的景深、焦距和光圈,并调整碰撞区域的光源。
15、本发明实施例的整车气囊误作用试验方法,所述制动机器人连接方向盘和制动踏板,所述制动机器人包括无线模块以控制所述制动踏板和保持方向盘稳定。
16、本发明实施例的整车气囊误作用试验方法,所述制动机器人包括方向盘稳定支架和制动踏板夹具,所述方向盘稳定支架固定于所述方向盘,所述制动踏板夹具则固定于所述制动踏板,所述方向盘稳定支架和所述制动踏板夹具之间设置有调节杆和制动驱动装置。
17、本发明实施例的整车气囊误作用试验方法,所述制动驱动装置包括制动气缸,所述制动气缸的输出轴上连接有气动推杆,所述气动推杆的末端连接所述制动踏板夹具。
18、本发明实施例的整车气囊误作用试验方法,所述制动机器人还包括安装底板,所述安装底板上设置有连接所述制动气缸的进气口和储气罐,所述无线模块也固定于所述安装底板,所述无线模块电连接有电磁阀,所述电磁阀控制所述储气罐和所述制动气缸之间的通断。
19、本发明实施例的整车气囊误作用试验方法,在所述车辆经过牵引,朝向路障移动之前,还包括以下步骤:
20、发车前重新确认信息,包括完成所述制动机器人、所述辆及所述路障的状态确认。
21、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种整车气囊误作用试验方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的整车气囊误作用试验方法,其特征在于:在所述路障的安装布置和缓冲件的摆放步骤中,所述路障包括方块、楔块或横梁,所述缓冲件包括缓冲轮胎和防护墩。
3.根据权利要求1所述的整车气囊误作用试验方法,其特征在于:在所述调试车辆状态的步骤,包括卸除整车aeb、卸除转向助力功能、校核整车质量状态、检查胎压和屏蔽约束系统的气囊作用。
4.根据权利要求1所述的整车气囊误作用试验方法,其特征在于:在所述车辆上安装采集装置的步骤,包括在车身上安装加速度传感器和车载记录仪,所述加速度传感器和所述车载记录仪连接有数据采集设备。
5.根据权利要求1所述的整车气囊误作用试验方法,其特征在于:在所述场地的外围布置朝向所述路障设置的摄像机的步骤,包括在所述车辆和所述路障碰撞的区域布置高速摄像机,并在通过数据采集设备调试所述高速摄像机的景深、焦距和光圈,并调整碰撞区域的光源。
6.根据权利要求1所述的整车气囊误作用试验方法,其特征在于:所述制动机器人连接方向盘和制动踏板,所述制动机器人包括无线模块以控制所述制动踏板和保持所述方向盘的稳定。
7.根据权利要求6所述的整车气囊误作用试验方法,其特征在于:所述制动机器人包括方向盘稳定支架和制动踏板夹具,所述方向盘稳定支架固定于所述方向盘,所述制动踏板夹具则固定于所述制动踏板,所述方向盘稳定支架和所述制动踏板夹具之间设置有调节杆和制动驱动装置。
8.根据权利要求7所述的整车气囊误作用试验方法,其特征在于:所述制动驱动装置包括制动气缸,所述制动气缸的输出轴上连接有气动推杆,所述气动推杆的末端连接所述制动踏板夹具。
9.根据权利要求8所述的整车气囊误作用试验方法,其特征在于:所述制动机器人还包括安装底板,所述安装底板上设置有连接所述制动气缸的进气口和储气罐,所述无线模块也固定于所述安装底板,所述无线模块电连接有电磁阀,所述电磁阀控制所述储气罐和所述制动气缸之间的通断。
10.根据权利要求1所述的整车气囊误作用试验方法,其特征在于,在所述车辆经过牵引,朝向路障移动之前,还包括以下步骤:
技术总结
本发明涉及汽车被动安全的测试技术领域,公开了一种整车气囊误作用试验方法,包括以下步骤:进行场地的布置,确认碰撞区域,并在碰撞区域进行路障的安装布置和缓冲件的摆放;调试车辆状态,进行车辆的牵引布置;在车辆上安装采集装置;在场地的外围布置朝向路障设置的摄像机;在车辆的车内设置制动机器人以约束方向盘和控制制动踏板;车辆经过牵引,朝向路障移动,进行与路障进行碰撞测试;收集碰撞后的数据,完成数据分析,并进行试验场地的恢复。有利于采集试验研发用的气囊误作用的车身数据,同时能避免对人员的伤害,保护试验设施和最大程度地减少试验车的维修成本,进一步保证了测试结果的准确性。
技术研发人员:王凯,郭三本,刘东春,王正勇,林继梁
受保护的技术使用者:中汽研汽车检验中心(广州)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!