一种考虑空地协同风险的无人机运行路径规划方法
本发明涉及无人机航路网络规划,具体涉及一种考虑空地协同风险的无人机运行路径规划方法。
背景技术:
1、在城市低空环境中,无人机运行面临的主要风险有两个:空中碰撞风险与地面撞击风险,目前在航路规划过程中,通常都是以地面撞击风险为代价函数,适用启发式算法对其进行路径搜索求解,以获得最小的代价成本与路径长度。但空中碰撞与地面撞击之间存在一定的事故链关系,例如空中碰撞风险一般是地面撞击事件的上层事件,且无人机与障碍物之间的间隔保持通常使用固定的保护区建模,不利于空域的高效使用。因此,亟需提出一种考虑空地协同风险、高效精细的无人机运行路径规划方法。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,本发明提供了一种考虑空地协同风险的无人机运行路径规划方法,根据需求构建起降点之间运行风险最小的路径,且在路径规划的过程中使用空中碰撞风险以保持对障碍物的安全间隔。解决了上述背景技术所阐述的问题。
2、实现本发明目的的技术解决方案为:
3、一种考虑空地协同风险的无人机运行路径规划方法,包括以下步骤:
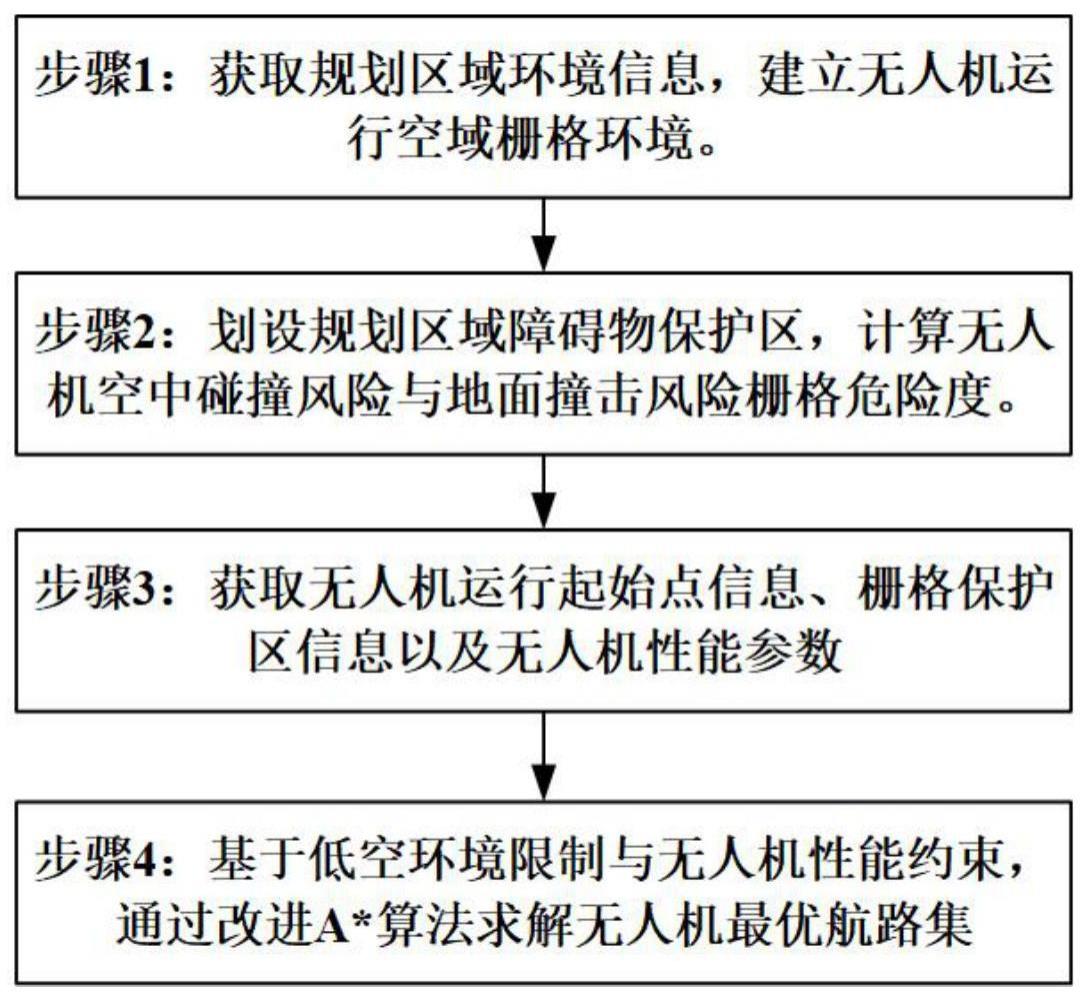
4、步骤s1:对规划区域采用栅格法进行三维建模,构建低空无人机运行栅格环境;
5、步骤s2:在规划区域内划设低空障碍物保护区,针对规划区域中每一个立体栅格,引入以空中碰撞风险与地面撞击风险协同的栅格危险度,以定量描述栅格中无人机的运行风险;
6、步骤s3:获取配送需求点、物流网点、保护区位置信息以及无人机性能参数,如最大转弯角、最小转弯缓冲距离、最小碰撞间隔等;
7、步骤s4:考虑复杂低空环境限制和无人机性能约束,以最小化航路成本作为目标函数,采用基于代价函数的改进a*算法搜索所有目标点间的最优航路,生成最优航路集。
8、进一步地,步骤s1具体包括:
9、确定无人机运行低空区域范围,将所选区域进行三维立体栅格建模及编码,用坐标(x,y,z)表示,且将每个栅格中心作为备选航路点。
10、进一步地,步骤s2具体包括:
11、步骤s21:在无人机运行空域内,建筑物、限制空域等特殊区域复杂,需要对每个建筑物进行保护区划设,保护区范围为以最小外接圆柱包围的立体区域,并对栅格空域进行是否占用判定划分;
12、步骤s22:构建无人机最小外接圆柱体碰撞保护区,计算每个栅格中与周边rdetec为半径的n个障碍物的各自碰撞概率并各自定义为独立事件计算总空中碰撞概率:
13、
14、步骤s23:计算每个栅格坠落的地面风险,s(x,y,z)=[sd,sp,sn],其中[sd,sp,sn]分别对应人员损伤、财产损失与噪声影响风险;
15、步骤s24:计算每个栅格的危险程度系数:r(x,y,z)=pc(x,y,z)·s(x,y,z)。
16、进一步地,步骤s3具体包括:
17、步骤s31:根据所选区域内居民楼、办公楼、配送网点、保护区的人口密度及分布特征,获取无人机运行起飞坐标点as=(x0,y0,z0)与降落坐标点ae=(xe,ye,ze);
18、步骤s32:获取物流无人机性能参数如:最大转弯角、最大爬升角、最大下降角、飞行高度范围、最小转弯缓冲距离,最小碰撞间隔。
19、进一步地,步骤s4具体包括:
20、步骤s41:设路径中经过某点ak=(xk,yk,zk),计算航程代价:
21、
22、步骤s42:计算危险度代价:
23、
24、式中,δ为危险度惩罚系数,ri为栅格危险度,li为无人机在相应栅格内行进的距离;
25、步骤s43:计算航路搜索代价函数,设g(k)=ω1cl(k)+ω2cd(k),其中,cl(k)与cd(k)分别表示起始点as到当前点ak的实际航程代价与危险度代价,ω1与ω2均为加权系数;
26、步骤s44:计算启发函数,以当前点与终点ae=(xe,ye,ze)的距离作为启发函数:
27、
28、步骤s45:以最小化航路成本为目标函数,采用基于代价函数的改进a*算法搜索最优的无人机运行路径。
29、与现有技术相比,本发明具有如下有益效果:
30、1.本发明提出的一种考虑空地协同风险的无人机运行路径规划方法,充分考虑空地协同风险事故链,采用空中碰撞概率作为坠地撞击事故的诱发因素,从而规划协同风险最小的运行路径;
31、2.本发明采用空中碰撞概率作为与障碍物间隔保持的基准,最大化利用空域容量,提高了运行效率。
技术特征:
1.一种考虑空地协同风险的无人机运行路径规划方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种考虑空地协同风险的无人机运行路径规划方法,其特征在于,步骤s1具体包括:
3.根据权利要求1所述的一种考虑空地协同风险的无人机运行路径规划方法,其特征在于,步骤s2具体包括:
4.根据权利要求1所述的一种考虑空地协同风险的无人机运行路径规划方法,其特征在于,步骤s3具体包括:
5.根据权利要求1所述的一种考虑空地协同风险的无人机运行路径规划方法,其特征在于,步骤s4具体包括:
技术总结
本发明公开了一种考虑空地协同风险的无人机运行路径规划方法,面向无人机城市运行场景,属于无人机路径规划技术领域。首先采用栅格法对规划区域进行精细化三维建模,构建空域栅格环境;随后在标定规划区域内根据建筑物位置和运行要求划设保护区,以空中碰撞风险与地面撞击风险指标量化栅格中的无人机运行风险;之后获取配送需求点、物流网点、保护区位置信息以及无人机性能参数;最后在满足间隔限制与无人机性能约束的条件下,以最小化航路成本为目标函数,采用A*算法搜索最优航路,从而生成最优航路集。本发明在精细化无人机运行风险评估前提下,实现了高效无人机运行路径规划。
技术研发人员:冯棣坤,张洪海,杜森,钟罡,张金鹏
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!