一种基于矩形信息的单目视觉平面测距方法
本发明涉及机器视觉,主要涉及单目视觉,具体指一种基于矩形信息的单目视觉平面测距方法。
背景技术:
1、实际应用中需要测量玻璃在平面的移动距离,常见测距会使用双目视觉、激光测距等方式进行测量,但上述方法在测量玻璃一类透明物体时有局限性。双目测距主要通过两个固定距离的镜头,计算两张画面的视野差进行距离估计。而玻璃边缘往往不够明显,双目视觉中两张图片的视野差很弱,难以计算。使用辅助光源进行补光加强后,边缘信息得以获取,但玻璃材质造成的反光、过曝等问题,双目视觉对上述情况下的区域难以进行测量。激光测距主要是通过测量激光、超声波等接触到物体表面后返回光源点的全程所需时间进行距离测量,其精度非常高。但玻璃因其透明材质,激光接触玻璃表面后反射回光源点的光很少,故无法测量玻璃等透明材质物体。同时上述两种测量方案的成本和落地使用的门槛较高,一般需要成套的硬件设备与算法,预算要求不高的测距项目难以采用上述两种方案。单目视觉具有低成本的特点,在一定情况下其测量误差可以达到0.26mm级别,故对成本敏感和精度要求不高的测量一般采用单目视觉测距。但单目视觉相比双目视觉和激光测距在精度上仍有差距,且单目视觉缺少物体的立体信息,需要输入多个参数以便建立立体视觉,使用过程较为繁琐。
2、现存的单目视觉方案大多基于深度学习,其使用具有大量参数的模型对图片对应的深度值进行拟合,使模型具有泛用性后可以对不同场景下的图片进行深度估计,进而避免了繁琐的预设参数过程。当下,基于深度学习的物体测距方案较为普遍,但其需要大量精确标注的数据集进行训练,模型的推理时常一般远大于传统算法运行时常。数据集处理难度大、训练成本高和推理时间长的特点限制了该方案的使用范围。
3、传统的单目视觉测距方案时间复杂度较低,能在短时间内计算出结果,适用于有实时性要求的场景。传统单目视觉测距方案主要有两种,基于单应变矩阵和基于常量的直接测量。单应变矩阵测量的计算对于环境光照敏感,在光照条件发生变化后进行特征计算会产生误差,影响最终的测量精度;基于常量的直接测量方法应用范围受限,其一般只能用于相机垂直拍摄物体的场景下。因此,针对应用场景受限、透明物体难测量、单目视觉测量精度低和计算复杂的问题,有必要设计一种具有更好适用性的测距方案。
技术实现思路
1、本发明针对现有技术所存在的上述技术问题,本发明提供了一种基于矩形先验信息的单目视觉平面测距方法,相比传统的单目视觉计算方案具有更少的计算量,解决透明物体难测的问题,同时保证足够的精度。
2、为了解决上述技术问题,本发明的技术方案为:
3、一种基于矩形信息的单目视觉平面测距方法,包括如下步骤:
4、s1、在玻璃移动所在的待测平面上放置一已知的矩形物体,通过拍摄相机获得图片,并取得拍摄相机的参数;
5、s2、取得已知矩形四个顶点在图片上的坐标以及矩形的实际对角长;
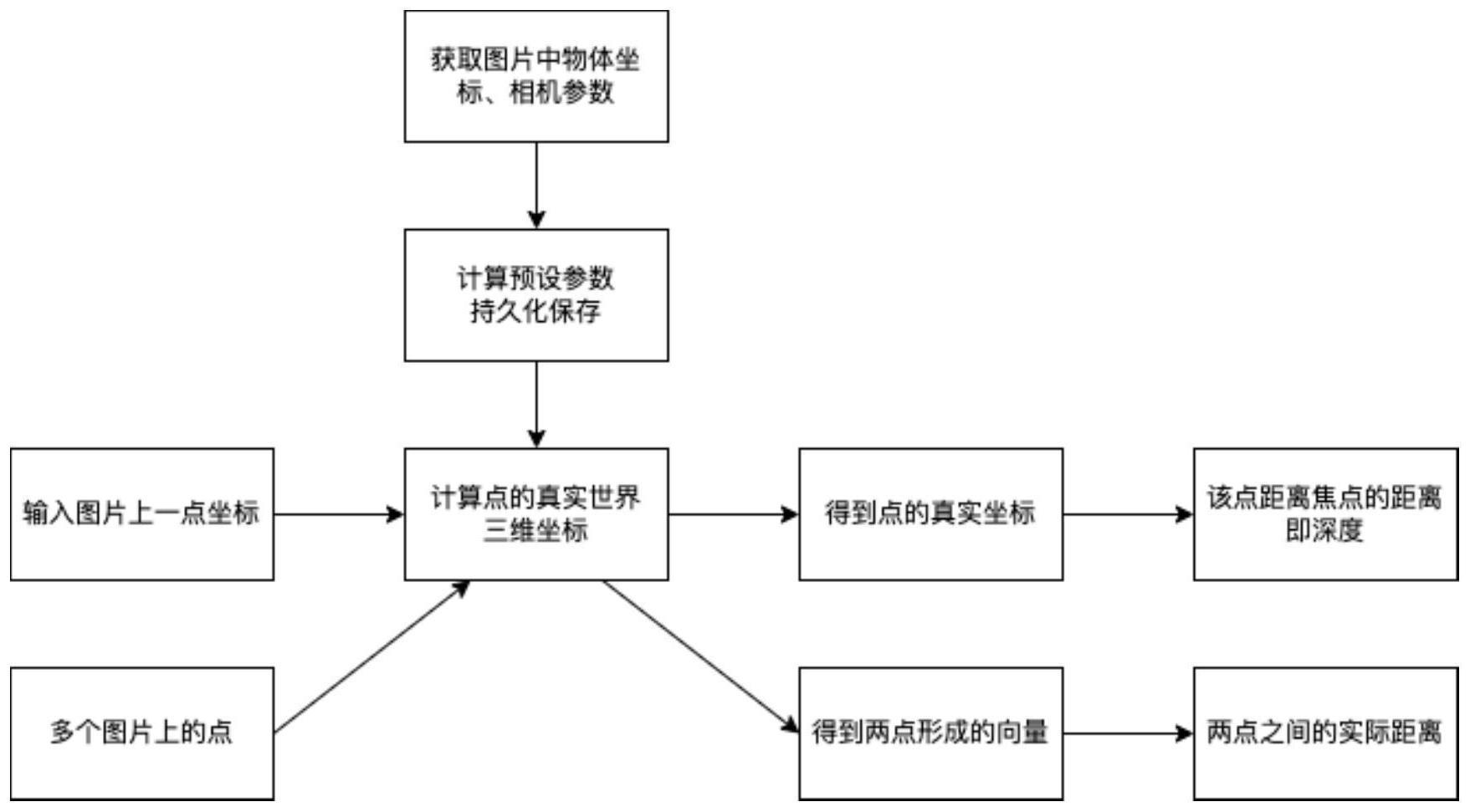
6、s3、根据获取的矩形顶点坐标、对角长以及拍摄相机的参数,通过计算得到拍摄相机所在平面和待测平面的预设参数并保存,并将已知矩形从视野中移除;
7、s4、读取玻璃上第一待测点在图片上的坐标,并根据得到的预设参数得到第一待测点对应的向量,求向量的模可得到该点到相机焦点的距离;
8、s5、读取玻璃上第二待测点在图片上的坐标,并根据得到的预设参数得到第二待测点对应的向量,将第二待测点对应的向量与得到的第一待测点的向量相减并求模,可得到两个待测点之间的真实距离。
9、作为优选,所述拍摄相机的参数包括焦距、相机ccd尺寸参数和图片分辨率。
10、作为优选,所述步骤s3中,通过计算得到预设参数的方法为:
11、根据图片分辨率大小和相机的ccd尺寸,计算出横、纵两个方向上单位像素的尺寸,即将图片上的像素长度换算到ccd上的真实长度的比例系数;以拍摄相机焦点作为坐标原点,垂直相机成像平面的方向作为z轴,相机成像平面的横、纵两个方向作为x、y轴,建立三维坐标系,同时计算得到拍摄相机平面、待测平面的参数,作为预设参数保存。
12、作为优选,所述步骤s4中,使用步骤s3中得到的预设参数和建立完成的三维坐标系,通过线性运算得到图片上第一待测点在实际待测平面上的对应点的三维坐标,进而由焦点和第一待测点的三维坐标得到第一待测点对应的向量。
13、作为优选,计算所述第二待测点对应向量的方法与计算第一待测点对应向量的方法相同。
14、本发明具有以下的特点和有益效果:
15、采用上述技术方案,此算法基于单目视觉图片,对使用的设备和环境要求低,适用性强,可计算包括过曝区域和透明物体在内的多种场景下的物体。仅需一次计算即可取得预设参数,后续计算可直接基于预设参数进行计算。该预设参数仅受待测平面位置和相机影响,不受环境光照变化、待测物体性质等因素而改变,具有持久使用的特点。本算法的理论精度值取决于预设参数选取时的坐标和待测物体选取时的坐标值,因使用图片进行计算,故像素坐标最多可精确到个位。因此理论精度即为成像元件ccd上的单位像素尺寸,即单位像素对应的实际长度,该值一般可精确到μm及以下,因此本算法可取得较高的精度。
技术特征:
1.一种基于矩形信息的单目视觉平面测距方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于矩形信息的单目视觉平面测距方法,其特征在于,所述拍摄相机的参数包括焦距、相机ccd尺寸参数和图片分辨率。
3.根据权利要求2所述的一种基于矩形信息的单目视觉平面测距方法,其特征在于,所述步骤s3中,通过计算得到预设参数的方法为:
4.根据权利要求3所述的一种基于矩形信息的单目视觉平面测距方法,其特征在于,所述步骤s4中,使用步骤s3中得到的预设参数和建立完成的三维坐标系,通过线性运算得到图片上第一待测点在实际待测平面上的对应点的三维坐标,进而由焦点和第一待测点的三维坐标得到第一待测点对应的向量。
5.根据权利要求1-4任意一项所述的一种基于矩形信息的单目视觉平面测距方法,其特征在于,计算所述第二待测点对应向量的方法与计算第一待测点对应向量的方法相同。
技术总结
本发明公开了一种基于矩形信息的单目视觉平面测距方法,包括如下步骤:在玻璃移动所在的待测平面上放置一已知的矩形物体,通过拍摄相机获得图片,并取得拍摄相机的参数;取得已知矩形四个顶点在图片上的坐标以及矩形的实际对角长;根据获取的矩形顶点坐标、对角长以及拍摄相机的参数,得到预设参数并保存;读取玻璃上第一待测点在图片上的坐标,并根据得到的预设参数得到第一待测点对应的向量;读取玻璃上第二待测点在图片上的坐标,并根据得到的预设参数得到第二待测点对应的向量,可得到两个待测点之间的真实距离。该方法相比传统的单目视觉计算方案具有更少的计算量,解决透明物体难测的问题,同时保证足够的精度。
技术研发人员:管力明,刘柏田,张海平,朱崇磊,施月玲
受保护的技术使用者:杭州电子科技大学信息工程学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!