一种玉米数据采集机器人作物行间导航路径识别方法、计算机设备及介质
本发明属于农业机械,具体涉及农机导航。
背景技术:
1、准确的导航路径是农用机器人自动作业的基础,路径的错误会导致机器人与作物发生碰撞,从而使机器人或作物发生损坏。机器人在玉米作物行之间导航路径主要依靠对两侧作物行进行检测来实现,目前常采用机器视觉的方法来识别导航路径。
2、研究人员多采用彩色相机来进行路径识别,通过对彩色相机拍摄到的图像利用超绿化算法(2g-r-b)、最大类间方差法(otsu)等方法将玉米作物与土壤分割开,之后确定玉米作物的位置,并利用霍夫变换或者最小二乘法实现玉米作物行直线的检测,但是这种方法只适用于玉米生长的某一时期,并且在玉米地内部由于光照不确定、叶片对镜头的遮挡等原因会导致相机不能获取到高质量的图像,从而会影响后续作物行直线识别的效果,并且常采用的霍夫变换不能很好的适用于玉米断垄的情况,最小二乘法对噪声的敏感程度较大,当算法求解出某一颗玉米位置偏差较大时,可能会导致识别出的作物行直线误差较大,从而影响后续导航路径识别的精度。
3、部分研究人员采用激光雷达来进行玉米作物行间的导航路径识别,通常的方法是对激光雷达采集到的原始点云数据进行预处理之后,采用kmeans聚类方法来确定玉米作物的位置,之后采用不同的直线拟合方法来拟合直线。上述方法适用于玉米生长初期,即玉米之间界限明显的情况,但是在玉米生长中后期,各个玉米植株的玉米叶片纵横交错,想要分割出单独的玉米比较困难。
技术实现思路
1、本发明提供一种玉米数据采集机器人作物行间导航路径识别方法、计算机设备及介质,解决激光雷达安装在机器人上,由于机器人在运动过程中震动现象明显,采集到的原始数据中包含有大量噪声点,这些噪声点会影响后续的点云数据处理与分析,使得计算量大,从而导致计算结果更为不精准的问题。
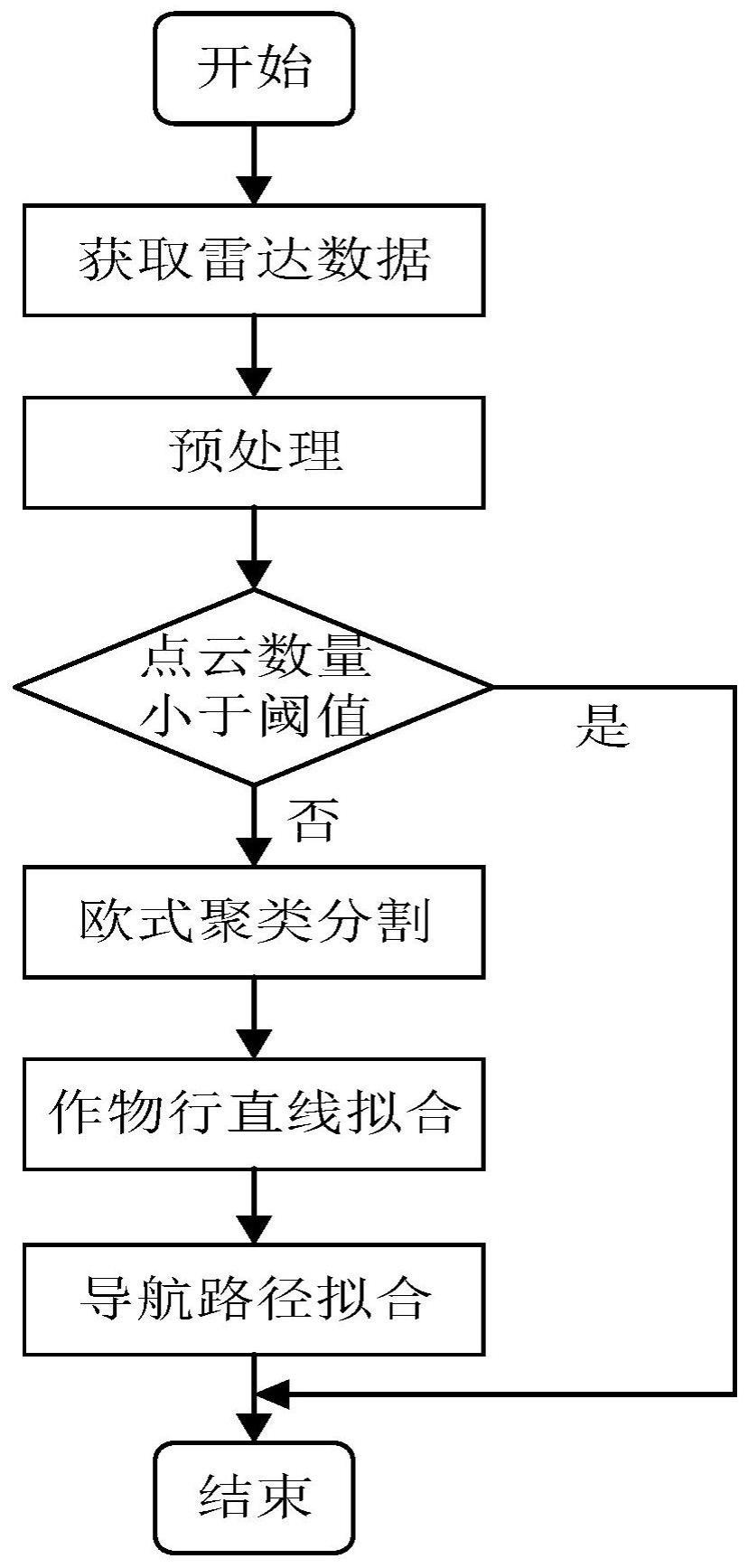
2、一种玉米数据采集机器人作物行间导航路径识别方法,所述方法包括:采集原始点云数据并进行预处理,获得处理后的点云数据;当所述处理后的点云数据的数量小于阈值时,不进行拟合;当所述处理后的点云数据的数量不小于所述阈值时,采用欧式聚类算法对所述处理后的点云数据进行分割,得到分割后的点云数据;采用随机采样一致性算法对所述分割后的点云数据进行拟合,得到作物所在的直线路径。
3、进一步地,所述预处理包括降采样处理、地面点云滤波、统计滤波和直通滤波;
4、进一步地,所述降采样处理包括随机采样、均匀采样和体素采样;
5、进一步地,所述阈值为100;
6、进一步地,所述将分割后的点云数据进行拟合为:将所述分割后的点云数据分别向xoy平面进行投影,得到两条作物行直线,两条作物行直线的对称轴即为作物所在的直线路径;
7、进一步地,所述方法还包括:采用欧式聚类算法对所述处理后的点云数据进行分割时,设置分割后的点云数据的数量为50。
8、本发明还提供一种计算机设备,所述设备包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器运行所述存储器存储的计算机程序时,所述处理器执行所述的一种玉米数据采集机器人作物行间导航路径识别方法。
9、本发明还提供一种计算机可读存储介质,所述存储介质用于储存计算机程序,所述计算机程序执行一种玉米数据采集机器人作物行间导航路径识别方法。
10、本发明还提供一种玉米数据采集机器人作物行间导航路径拟合系统,所述系统包括:采集模块:用于采集原始数据并进行预处理,获得点云数据;取值模块:用于设定阈值;判定模块:用于判断所述点云数据的数量与所述阈值的大小关系;分割模块:当所述点云数据的数量不小于所述阈值时,采用欧式聚类算法对所述点云数据进行分割,得到分割后的点云数据;拟合模块:采用最小二乘法对所述分割后的点云数据进行拟合,得到作物所在的直线路径。
11、本发明的有益效果:
12、本发明所述的一种玉米数据采集机器人作物行间导航路径识别方法,该方法可以消除玉米断垄的影响,并且可以很好去除噪声的影响。所述方法通过对激光雷达采集到的原始点云数据进行分析,从而得到玉米作物行内的机器人运动路径。点云数据中的噪声点主要包含有离群点和冗余点,离群点与其他点在位置或形状等特征上存在明显差异,通常是指远离点云主体的稀疏点,冗余点是指采集到的工程需求之外的多余点,因此,本发明对获取到的点云数据,首先进行预处理操作以去除噪声点,并减少点云数量,降低计算量,从而提高计算的准确性,得到的机器人导航路径更为精准。
13、本发明中通过对玉米作物的点云数据进行分析,直接拟合玉米作物行所在直线,去除了确定单株玉米的位置这一步骤,该方法具有较强的通用性,适用于玉米不同生长时期。
14、本发明适用于玉米数据采集机器人自动作业。
技术特征:
1.一种玉米数据采集机器人作物行间导航路径识别方法,其特征在于,所述方法包括采集原始数据并进行预处理,获得点云数据;
2.根据权利要求1所述的一种玉米数据采集机器人作物行间导航路径识别方法,其特征在于,所述预处理包括降采样处理、地面点云滤波、统计滤波和直通滤波。
3.根据权利要求3所述的一种玉米数据采集机器人作物行间导航路径识别方法,其特征在于,所述降采样处理包括随机采样、均匀采样和体素采样。
4.根据权利要求3所述的一种玉米数据采集机器人作物行间导航路径识别方法,其特征在于,所述地面点云滤波包括布料模拟滤波。
5.根据权利要求1所述的一种玉米数据采集机器人作物行间导航路径识别方法,其特征在于,所述阈值为100。
6.根据权利要求1所述的一种玉米数据采集机器人作物行间导航路径识别方法,其特征在于,所述将分割后的点云数据进行拟合为:将所述分割后的点云数据分别向xoy平面进行投影,得到两条作物行直线,两条作物行直线的对称轴即为作物所在的直线路径。
7.根据权利要求1所述的一种玉米数据采集机器人作物行间导航路径识别方法,其特征在于,所述方法还包括:采用欧式聚类算法对所述点云数据进行分割时,设置分割后的点云数据的数量为50。
8.一种计算机设备,其特征在于,所述设备包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器运行所述存储器存储的计算机程序时,所述处理器执行根据权利要求1-6中任一项所述的一种玉米数据采集机器人作物行间导航路径识别方法。
9.一种计算机可读存储介质,其特征在于,所述存储介质用于储存计算机程序,所述计算机程序执行权利要求1-6中任一项所述的一种玉米数据采集机器人作物行间导航路径识别方法。
10.一种玉米数据采集机器人作物行间导航路径拟合系统,其特征在于,所述系统包括:
技术总结
一种玉米数据采集机器人作物行间导航路径拟合方法、计算机设备及介质,属于精准农业技术领域,解决了由于机器人在运动过程中震动现象明显,采集到的原始数据中包含有大量噪声点,这些噪声点会影响后续的点云数据处理与分析,使得计算量大,从而导致计算结果更为不精准的问题。所述导航路径拟合方法包括:采集原始数据并进行预处理,获得点云数据;当所述点云数据的数量小于阈值时,不进行拟合,当所述点云数据的数量不小于阈值时,采用欧式聚类算法对所述点云数据进行分割,得到分割后的点云数据;采用随机采样一致性算法对所述分割后的点云数据进行拟合,得到作物所在直线的路径。本发明适用于玉米数据采集机器人自动作业。
技术研发人员:李永强,霍震,程凯东,姚鸿勋
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!