一种机器人碰撞加速测试结构的制作方法
本发明涉及机器人碰撞测试,具体为一种机器人碰撞加速测试结构。
背景技术:
1、碰撞试验是用于评定运输包装件在运输过程中承受多次重复性机械碰撞的耐冲击强度及包装对内装物的保护能力,它既可作为单项试验,也可以作为一系列试验的组成部分;其中机器人在生产测试中通常也会进行碰撞实验,以此验证机器人的整体质量或局部质量,达到得到机器人各项数据的目的。
2、目前在机器人碰撞测试中,首先会将机械人固定在驱动装置,以供对机器人提供运动势能,保证机械人在碰撞时具有加速度的力作用,然后将机械人与接触面进行碰撞接触,经反复操作,从接触面上的受力情况,以及机械人的受损程度,进而得出机械人碰撞测试的数据,但由于运动学可知,物体在运动过程中始终会遇到阻力作用,而在机械人碰撞测试中的驱动装置无论选择轨道输送还是推杆的水平推动,都会受到轨道与滑轮之间的阻力以及空气阻力的影响,而因阻力作为常规不可控因素的存在,其无法具体计算得出,导致了机器人在与碰撞接触面接触时,所得冲力数值始终存在误差,且误差随机性较高,因此需要更多的反复操作来优化测试数据,导致测试时间过长,费时费力。为此,我们提出了一种机器人碰撞加速测试结构来解决上述问题。
技术实现思路
1、本发明提供了一种机器人碰撞加速测试结构,用于解决了上述背景技术中提出的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种机器人碰撞加速测试结构,包括测试箱,所述测试箱的侧面一端安装有控制器,控制器上设有数据显示器,所述测试箱的内部沿测试箱的长度方向设有直线滑轨,直线滑轨的横截面为t字型结构,且固定在测试箱内的底部,所述直线滑轨两侧的顶部和底部均沿直线滑轨的长度方向安装有第一条形电磁铁,所述直线滑轨上设有移动块,移动块的横截面为c字型结构,且套接在直线滑轨上,所述移动块内的两侧顶部和底部均安装有第二条形电磁铁,第二条形电磁铁与第一条形电磁铁一一对应,且第二条形电磁铁与第一条形电磁铁相对的一侧磁性相同,第二条形电磁铁与第一条形电磁铁均通过导线与控制器相连接;
3、所述移动块的两侧均沿直线滑轨的长度方向设有两个第二电磁线圈,第二电磁线圈为环形缠绕,且相邻两个第二电磁线圈的同侧磁性相反,所述直线滑轨的两侧均设有条形板,条形板垂直固定在测试箱内的底面上,所述条形板的两端均通过连接板相连接,连接板与直线滑轨固定连接,所述条形板靠近直线滑轨的一侧沿条形板的长度方向安装有多个等距排列的第一电磁线圈,第一电磁线圈为8字型缠绕,且相邻两个第一电磁线圈之间磁性相反,所述第一电磁线圈与靠近的第二电磁线圈相对应,两个条形板上第一电磁线圈相互对称,且相对的两个第一电磁线圈相对面的磁性相反,所述第一电磁线圈和第二电磁线圈通过导线与控制器相连接;
4、所述移动块的顶部安装有l型板,l型板上安装有多个螺栓固定座,所述测试箱的内部靠近l型板上的竖直板的一端设有推板,推板与l型板的竖直板平行对应,且推板远离l型板的一侧垂直设有至少两个电动推杆,电动推杆固定在测试箱上,且电动推杆通过导线与控制器相连接。
5、可选的,所述测试箱靠近推板的一端外壁上安装有真空泵,真空泵的抽气端设置在测试箱的内部,且真空泵通过导线与控制器相连接。
6、可选的,所述测试箱的内部远离推板的一端两侧均沿直线滑轨的长度方向安装有电动滑轨,所述直线滑轨的上方设有u型板,u型板的两端均通过电动滑块与电动滑轨相连接,所述u型板靠近推板的一侧设有第一受力板,第一受力板平行于推板,且第一受力板与l型板的上方相对应,所述第一受力板通过多个等距排列的压缩弹簧与u型板相连接,所述第一受力板靠近推板的一侧平行设有第二受力板,第二受力板的中部通过压力传感器与第一受力板相连接。
7、可选的,所述u型板的两端相对靠近的一侧均安装有高速摄像机,高速摄像机正对第二受力板靠近推板的一侧。
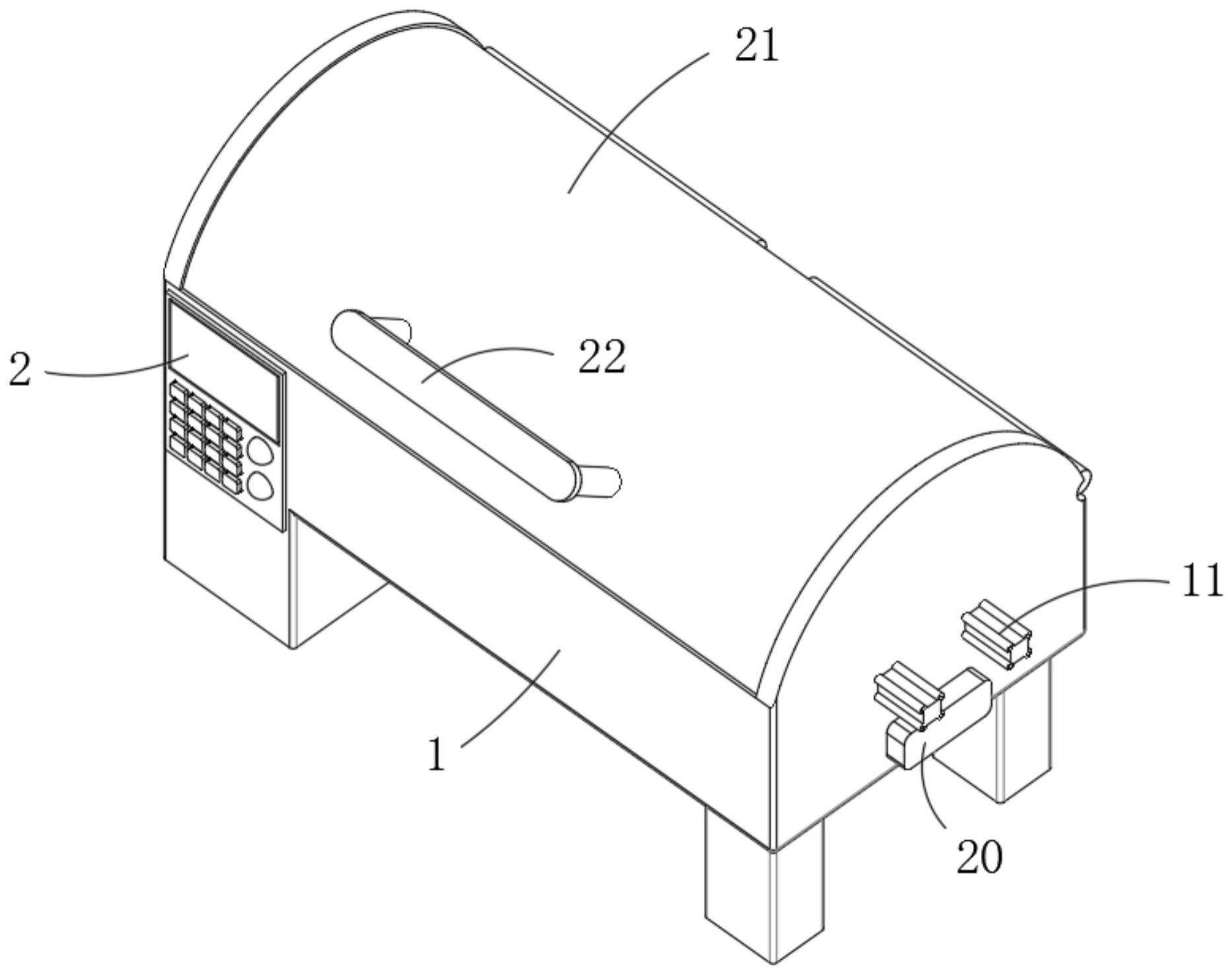
8、可选的,所述测试箱的顶部一侧铰接有顶盖,顶盖的另一侧通过锁扣与测试箱相连接,所述顶盖为拱形结构,且顶盖的顶面为钢化可视玻璃,所述顶盖远离铰接位置的一侧安装有把手,所述顶盖的底部边缘处均安装有与测试箱顶部相对应的密封圈。
9、本发明具备以下有益效果:
10、通过上下两端的第一条形电磁铁与第二条形电磁铁,对移动块进行持续的磁力作用,使得移动块悬浮在直线滑轨上,并不与直线滑轨发生接触,从而规避直线滑轨与移动块之间发生接触时的摩擦阻力等影响,配合第一电磁线圈和第二电磁线圈,即保证移动块两侧受磁力作用,保持运动时的平衡,不会发生晃动等情况,又在第二电磁线圈和第一电磁线圈相互进行磁场切割时,向移动块提供推动作用,进而为移动块提供加速作用,加大机器人碰撞时的力作用,起到碰撞加速测试的作用。
技术特征:
1.一种机器人碰撞加速测试结构,包括测试箱(1),其特征在于:所述测试箱(1)的侧面一端安装有控制器(2),控制器(2)上设有数据显示器,所述测试箱(1)的内部沿测试箱(1)的长度方向设有直线滑轨(3),直线滑轨(3)的横截面为t字型结构,且固定在测试箱(1)内的底部,所述直线滑轨(3)两侧的顶部和底部均沿直线滑轨(3)的长度方向安装有第一条形电磁铁(4),所述直线滑轨(3)上设有移动块(5),移动块(5)的横截面为c字型结构,且套接在直线滑轨(3)上,所述移动块(5)内的两侧顶部和底部均安装有第二条形电磁铁(6),第二条形电磁铁(6)与第一条形电磁铁(4)一一对应,且第二条形电磁铁(6)与第一条形电磁铁(4)相对的一侧磁性相同,第二条形电磁铁(6)与第一条形电磁铁(4)均通过导线与控制器(2)相连接;
2.根据权利要求1所述的一种机器人碰撞加速测试结构,其特征在于:所述测试箱(1)靠近推板(12)的一端外壁上安装有真空泵(20),真空泵(20)的抽气端设置在测试箱(1)的内部,且真空泵(20)通过导线与控制器(2)相连接。
3.根据权利要求1所述的一种机器人碰撞加速测试结构,其特征在于:所述测试箱(1)的内部远离推板(12)的一端两侧均沿直线滑轨(3)的长度方向安装有电动滑轨(13),所述直线滑轨(3)的上方设有u型板(15),u型板(15)的两端均通过电动滑块(14)与电动滑轨(13)相连接,所述u型板(15)靠近推板(12)的一侧设有第一受力板(16),第一受力板(16)平行于推板(12),且第一受力板(16)与l型板(10)的上方相对应,所述第一受力板(16)通过多个等距排列的压缩弹簧(17)与u型板(15)相连接,所述第一受力板(16)靠近推板(12)的一侧平行设有第二受力板(18),第二受力板(18)的中部通过压力传感器与第一受力板(16)相连接。
4.根据权利要求3所述的一种机器人碰撞加速测试结构,其特征在于:所述u型板(15)的两端相对靠近的一侧均安装有高速摄像机(19),高速摄像机(19)正对第二受力板(18)靠近推板(12)的一侧。
5.根据权利要求1所述的一种机器人碰撞加速测试结构,其特征在于:所述测试箱(1)的顶部一侧铰接有顶盖(21),顶盖(21)的另一侧通过锁扣与测试箱(1)相连接,所述顶盖(21)为拱形结构,且顶盖(21)的顶面为钢化可视玻璃,所述顶盖(21)远离铰接位置的一侧安装有把手(22),所述顶盖(21)的底部边缘处均安装有与测试箱(1)顶部相对应的密封圈。
技术总结
本发明公开了一种机器人碰撞加速测试结构,涉及机器人碰撞测试技术领域,具体包括测试箱,所述测试箱的侧面一端安装有控制器,控制器上设有数据显示器,所述测试箱的内部沿测试箱的长度方向设有直线滑轨,直线滑轨的横截面为T字型结构,且固定在测试箱内的底部。本发明使用时,通过上下两端的第一条形电磁铁与第二条形电磁铁,使得移动块悬浮在直线滑轨上,规避直线滑轨与移动块之间的摩擦阻力等影响,配合第一电磁线圈和第二电磁线圈,即保证移动块运动时的平衡,又向移动块提供推动作用,进而为移动块提供加速作用,加大机器人碰撞时的力作用,起到碰撞加速测试的作用。
技术研发人员:王鹏,何志雄,刘俊杰,林阮朗,刘铭晟
受保护的技术使用者:广东天太机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!