一种基于深度学习网络的二维联合成像与自聚焦方法
本发明涉及逆合成孔径雷达图像处理领域,尤其涉及一种基于深度学习网络的二维联合成像与自聚焦方法。
背景技术:
1、逆合成孔径雷达(isar)具有获取非合作运动目标二维(2d)图像的能力,在现代军事和民用领域得到了广泛应用,精确的运动补偿是高分辨率isar成像的前提。如果目标运动没有得到精确补偿,则残余运动将导致剩余的相位误差出现,从而使得成像结果的散焦。
2、如今,深度学习(dl)技术已被引入isar成像领域,并被证明通过训练大量数据集设计深度网络,可以有效地获取高分辨率图像。它也被称为一种数据驱动方法。最常见的基于深度学习的成像方法一般是利用在计算机视觉等领域广泛应用的传统神经网络结构实现低分辨图像到高分辨图像的转变。因此,将卷积神经网络(cnn)、全连接cnn(fcnn)和unet等典型的神经网络被应用于isar成像,获得了优于传统方法的高分辨率结果,
3、现有技术中,
4、[s.wei,j.liang,m.wang,j.shi,x.zhang,andjinheran.“af-ampnet:adeep learningapproachforsparseapertureisarimagingandautofocusing,”ieeetrans.geosci.remotesens.,vol.60,pp.5206514,apr.2022.]提出了一种基于amp的成像和相位误差估计深度网络;
5、[x.li,x.bai,andf.zhou,high-resolutionisarimagingandautofocusingvia2d-admm-net,remotesens.,vol.13,no.12,pp.2326,jun.2021.]中研究了类似的工作,其中admm通过与相位误差补偿网络相结合而被展开为深度网络结构。
6、但是,这些网络只考虑跨距离方向上的相位误差估计。事实上,对于rsfisar成像,相位误差存在于距离和方位向二维空间,需要一起补偿。
技术实现思路
1、为解决距离和方位向二维空间的相位误差较大的问题,成像精度不高,本发明提供一种基于深度学习网络的二维联合成像与自聚焦方法,其包括:
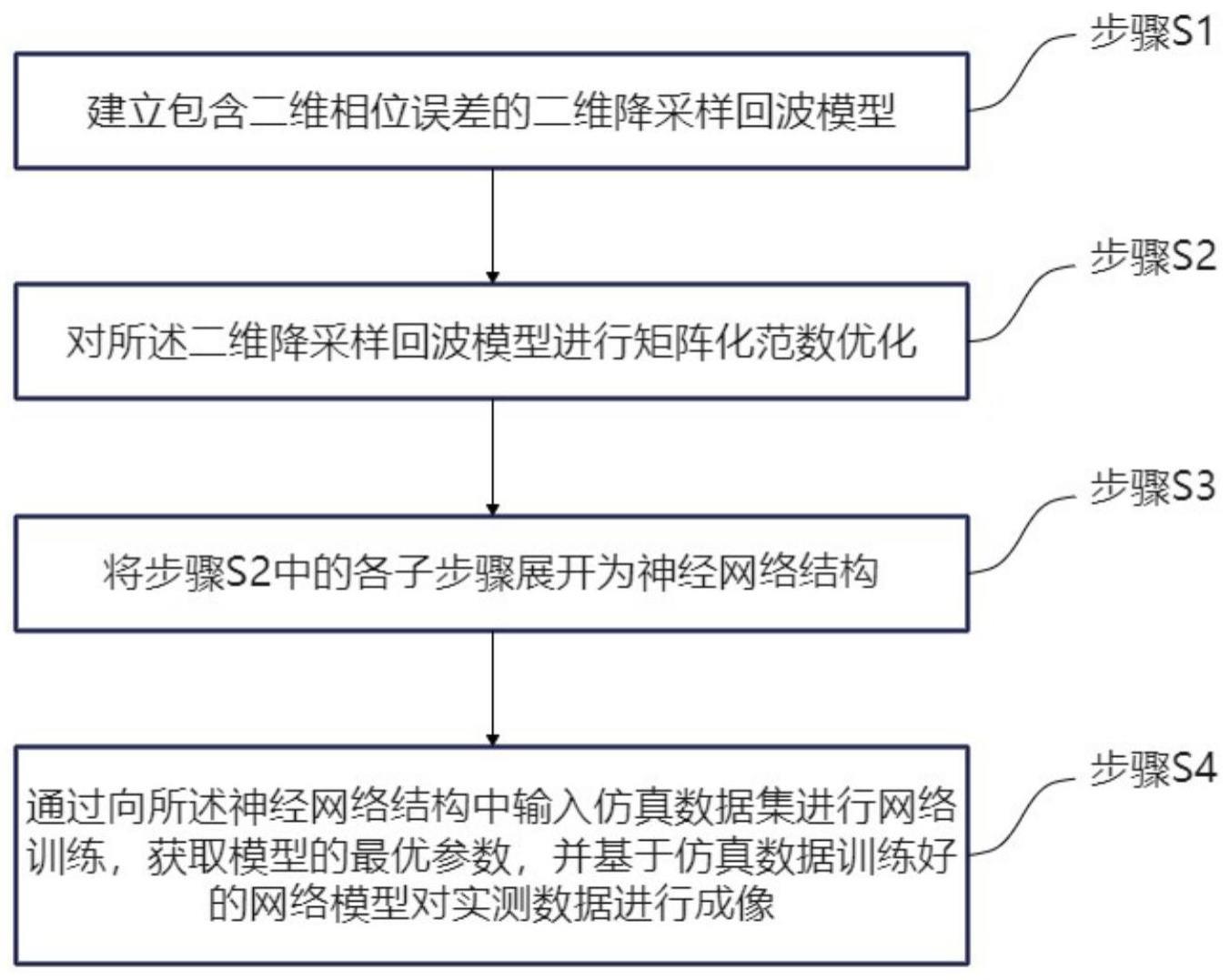
2、步骤s1,建立包含二维相位误差的二维降采样回波模型;
3、步骤s2,对所述二维降采样回波模型进行矩阵化l1范数优化,包括,
4、步骤s21,固定所述二维降采样回波模型中的误差矩阵e并对所述二维降采样回波模型中的稀疏场景矩阵x进行l1范数优化;
5、步骤s22,固定所述的稀疏场景矩阵x,对所述误差矩阵进行l1范数优化;
6、步骤s23,通过s21以及s22的交替迭代优化,最终获得优化后的稀疏场景矩阵x以及优化后的误差矩阵e;
7、步骤s3,将所述步骤s2中的各子步骤展开为神经网络结构;
8、步骤s4,通过向所述神经网络结构中输入仿真数据集进行网络训练,获取模型的最优参数,并基于仿真数据训练好的网络模型对实测数据进行成像。
9、进一步地,步骤s1中,所述二维降采样回波模型以式(1)表示,
10、
11、式(1)中,y表示二维稀疏回波数据矩阵,fr表示距离向随机降采样矩阵,表示方位向随机降采样矩阵,h′r表示距离向的字典矩阵,h′a表示方位向的字典矩阵,w表示噪声矩阵,e′表示误差矩阵,x表示稀疏场景矩阵,e表示hadamard乘积,φr=frh′r,φa=fah′a,
12、进一步地,所述步骤s2中,还包括对二维降采样回波模型向量化,其中,
13、向量化后的二维降采样回波模型向量化以式(3)表示,
14、
15、式(3)中,a为kronecker积,x表示向量化稀疏场景矩阵,w表示稀疏化噪声矩阵,
16、进一步地,所述步骤s2中,对所述二维降采样回波模型进行矩阵化l1范数优化,其中,获取范数优化函数,
17、
18、式(4)中a为拉格朗日乘子,d为惩罚参数,<’>表示内积,v为辅助变量,λ表示第一正则化参数,δ表示第二正则化参数。
19、进一步地,所述步骤s21中,对所述二维降采样回波模型中的稀疏场景矩阵x进行l1范数优化,表示为,
20、
21、其中z(·)表示收缩函数,xp+1表示第p+1次循环优化后的稀疏矩阵,ap+1表示第p+1次循环优化后的拉格朗日乘子矩阵,所述拉格朗日乘子矩阵基于拉格朗日参数的矩阵化所得,vp+1表示第p+1次循环优化后的辅助变量矩阵,所述辅助变量矩阵基于辅助变量矩阵化后所得,u=ξ(eh)⊙vec(y),x(eh)表示将向量eh转化为矩阵eh的对角线元素的操作,(·)h表示共轭转置,(×)*表示卷积操作。
22、进一步地,所述步骤s22中,对所述误差矩阵进行l1范数优化,表示为,
23、
24、式(6)中,ym,h表示二维稀疏回波数据矩阵的第m行第h列,p表示第p次循环,表示第p次循环回波信号中的二维相位误差,(g)m,g表示矩阵的第m行(g)g,h表示矩阵的第h列。
25、进一步地,所述步骤s3中,将步骤s21以及步骤s22中的算法实现步骤展开为深度学习网络结果,所述神经网络结构中单个神经网络层的结构主要包括:x模块,用于实现步骤s21以及步骤s22中的稀疏场景矩阵x的更新,z模块,用于实现步骤s21以及步骤s22中的辅助变量矩阵v的更新,a模块,用于实现步骤s21以及步骤s22中的拉格朗日矩阵a的更新,e模块,用于实现步骤s21以及步骤s22中的相位误差矩阵e的更新。
26、进一步地,所述步骤s4中,通过输入仿真数据集,对网络参数进行训练,通过损失函数来确定最佳优化参数,表示为,
27、
28、式(7)中,q为仿真训练集中训练数据的个数,表示第q个数据的重构结果,xli为标签成像结果,θ={ll,dl}表示需要优化的参数。
29、与现有技术相比,本发明通过建立二维稀疏条件下的二维降采样回波模型,用于isar成像和自动聚焦,为了获取更高效率,对所述向量化二维降采样回波模型进行矩阵化l1范数优化,最后将提出的矩阵化l1范数优化算法展开为神经网络结构,在复数域使用仿真数据集利用反向传播算法进行网络训练,将训练完成的神经网络用以isar成像,在减少运算量的前提下,提高了成像效果。
30、尤其,本发明充分利用二维耦合信息,构建二维稀疏条件下的二维降采样回波模型,用于联合自聚焦和高分辨率isar成像,并且将矩阵化l1范数优化算法转化为网络展开形式,获取最优的网络参数,不仅减小了计算和内存需求,且提高了成像质量。
技术特征:
1.一种基于深度学习网络的二维联合成像与自聚焦方法,其特征在于,包括:
2.根据权利要求1所述的基于深度学习网络的二维联合成像与自聚焦方法,其特征在于,步骤s1中,所述二维降采样回波模型以式(1)表示,
3.根据权利要求2所述的基于深度学习网络的二维联合成像与自聚焦方法,其特征在于,所述步骤s2中,还包括对二维降采样回波模型向量化,其中,
4.根据权利要求3所述的基于深度学习网络的二维联合成像与自聚焦方法,其特征在于,所述步骤s2中,对所述二维降采样回波模型进行矩阵化l1范数优化,其中,获取范数优化函数,
5.根据权利要求1所述的基于深度学习网络的二维联合成像与自聚焦方法,其特征在于,所述步骤s21中,对所述二维降采样回波模型中的稀疏场景矩阵x进行l1范数优化,表示为,
6.根据权利要求1所述的基于深度学习网络的二维联合成像与自聚焦方法,其特征在于,所述步骤s22中,对所述误差矩阵进行l1范数优化,表示为,
7.根据权利要求1所述的基于深度学习网络的二维联合成像与自聚焦方法,其特征在于,所述步骤s3中,将步骤s21以及步骤s22中的算法实现步骤展开为深度学习网络结果,所述神经网络结构中单个神经网络层的结构主要包括:x模块,用于实现步骤s21以及步骤s22中的稀疏场景矩阵x的更新,z模块,用于实现步骤s21以及步骤s22中的辅助变量矩阵v的更新,a模块,用于实现步骤s21以及步骤s22中的拉格朗日矩阵a的更新,e模块,用于实现步骤s21以及步骤s22中的相位误差矩阵e的更新。
8.根据权利要求1所述的基于深度学习网络的二维联合成像与自聚焦方法,其特征在于,所述步骤s4中,通过输入仿真数据集,对网络参数进行训练,通过损失函数来确定最佳优化参数,表示为,
技术总结
本发明涉及逆合成孔径雷达图像处理领域,尤其涉及基于深度学习网络的二维联合成像与自聚焦方法,本发明通过建立二维稀疏条件下的二维降采样回波模型,用于ISAR成像和自动聚焦,为了获取更高效率,对所述向量化二维降采样回波模型进行矩阵化l<subgt;1</subgt;范数优化,最后将提出的矩阵化l<subgt;1</subgt;范数优化算法展开为神经网络结构,在复数域使用仿真数据集利用反向传播算法进行网络训练,将训练完成的神经网络用以ISAR成像,在减少运算量的前提下,提高了成像效果。
技术研发人员:杨军,吕明久,吴瑕,马建朝,程祺,刘诗钊,陈文峰
受保护的技术使用者:中国人民解放军空军预警学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!