用于测量距离的飞行时间传感器和方法与流程
实施例和实现涉及用于测量距离的飞行时间传感器和方法。
背景技术:
1、飞行时间传感器是一种用于测量该传感器与在其中放置有该传感器的场景的元件之间的距离的传感器。飞行时间传感器被配置为在场景中发射光线。这些光线可以被场景的不同元件反射。此外,飞行时间传感器可以包括光敏像素矩阵。矩阵的每个光敏像素被配置为检测该像素上的入射光信号。因此,每个像素都使得可以检测由传感器发射然后由不同元件反射的光线。对由矩阵的像素反射的射线的检测使得飞行时间传感器能够计算传感器与对光线进行反射的场景的元件之间的距离。然后,飞行时间传感器生成场景的图像,其针对图像的每个像素定义了传感器与场景的元件之间的距离。
2、一些飞行时间传感器使用点投射器。因此由飞行时间传感器生成的图像包括多个点,每个点覆盖若干像素。这些点对应于检测由场景的元件反射的由传感器发射的射线的矩阵的像素。这种飞行时间传感器可以减少与场景中的环境光相关联的干扰。光在每个点处的局部集中使得可以增强距离确定性能。
3、计算与相同点的像素相关联的距离的平均值是已知的。然后将这个平均距离值与图像的该点相关联。
4、图像的点可以包括针对场景的被安置在距传感器不同距离处的不同元件递送距离值的像素。在这种情况下,传感器将平均计算距离值与点相关联,该平均计算距离值可能对应于场景中实际可能不存在元件的距离。因此,与该点相关联的值是不正确的。因此,这种飞行时间传感器在某些条件下相对不可靠,并且不能检测图像的相同点上的若干元件。
技术实现思路
1、实施例可以在上述条件下提供可靠的飞行时间传感器。
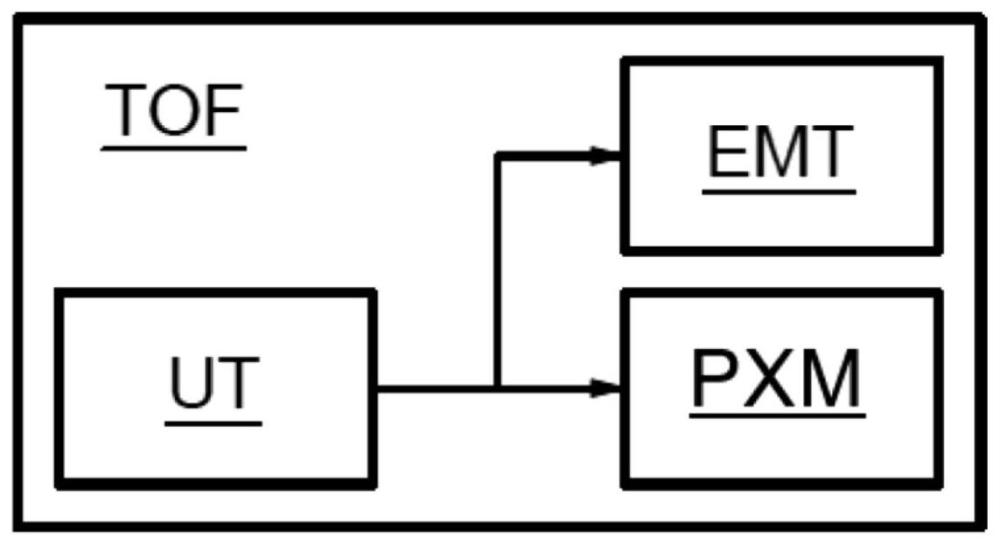
2、根据一方面,飞行时间传感器包括发射设备,该发射设备被配置为在其中放置有飞行时间传感器的场景中发射光线。光敏像素矩阵被配置为接收来自场景的光信号并且生成图像,该图像图示了与由发射设备发射、由场景的元件反射、并且由像素矩阵接收的射线相关联的点。每个点覆盖图像的多个像素。处理单元被配置为针对图像的每个点,将这个点的像素划分成至少一个像素群组,并且针对每个像素群组,计算该群组的像素的距离值的代表值。然后可以针对像素群组的每个像素应用该代表距离值。
3、这样的飞行时间传感器使得可以将图像的点彼此隔离,然后根据其距离值而针对图像的每个点定义像素群组。然后可以将图像的点的群组与场景的不同元件的存在相关联。
4、因此,这样的飞行时间传感器使得可以检测位于图像的相同点上的场景的若干元件,并且针对图像的这个点,返回与在这个点上的元件相同数量的距离值。
5、这样的飞行时间传感器还使得可以限制与图像的点的某些像素相关联的距离值误差。实际上,将具有彼此接近的距离值的像素进行分组可以使得提取具有偏离距离值的像素成为可能。通过不考虑具有偏离距离值的像素,这种传感器的信噪比得到增强。
6、因此这种飞行时间传感器是可靠和精确的。
7、在有利的实施例中,处理单元还被配置为:如果针对相同点的像素群组计算出的代表值的差异小于给定阈值,那么合并这些像素群组,然后针对通过合并这些群组而形成的新像素群组计算新的代表距离值。以这种方式,处理单元使得可以避免若干群组与场景的相同元件的存在相关联。
8、优选地,对每个点的像素进行划分包括分割算法的执行,例如,划分成k均值的算法。
9、根据另一方面,提出了一种用于测量飞行时间传感器与在其中放置有飞行时间传感器的场景的元件之间的距离的方法。该方法包括由飞行时间传感器的发射设备在场景中发射光点,由飞行时间传感器的像素矩阵接收来自场景的光信号,并且由像素矩阵生成图像,该图像图示了与由发射设备发射、由场景的元件反射、并且由像素矩阵接收的射线相关联的点,每个点覆盖图像的多个像素。针对图像的每个点,将这个点的像素划分成至少一个像素群组。针对每个像素群组,计算该群组的像素的距离值的代表值。然后针对像素群组的每个像素应用该代表距离值。
10、有利地,该方法还包括:如果针对相同点的像素群组计算出的代表值的差异小于给定阈值,则合并这些像素群组,然后针对通过合并这些群组而形成的新群组计算新的代表距离值。
11、优选地,对每个点的像素的划分包括分割算法的执行,特别是划分成k均值的算法。
技术特征:
1.一种飞行时间传感器,包括:
2.根据权利要求1所述的飞行时间传感器,其中所述处理单元还被配置为:当针对相同点的像素群组计算出的所述代表值的差异小于给定阈值时,通过合并所述相同点的像素群组来创建合并的像素群组。
3.根据权利要求2所述的飞行时间传感器,其中所述给定阈值是所述代表值的平均值的2%。
4.根据权利要求2所述的飞行时间传感器,其中所述处理单元还被配置为:计算针对所述合并的像素群组的新的代表距离值。
5.根据权利要求1所述的飞行时间传感器,其中所述处理单元被配置为:通过执行分割算法来划分每个点的所述像素。
6.根据权利要求5所述的飞行时间传感器,其中所述分割算法是划分成k均值的算法。
7.根据权利要求1所述的飞行时间传感器,其中所述处理单元被配置为:通过执行直方图分析来划分每个点的所述像素。
8.根据权利要求1所述的飞行时间传感器,其中所述处理单元被配置为:通过将距离值小于所述像素的距离的平均值的2%的像素进行分组来进行划分。
9.根据权利要求1所述的飞行时间传感器,其中所述处理单元还被配置为:针对所述像素群组,去除距离值偏离所述群组中的其他像素的距离值的像素。
10.根据权利要求1所述的飞行时间传感器,其中所述图像的每个点包括一组10×10像素。
11.一种用于测量飞行时间传感器与在其中放置有所述飞行时间传感器的场景的元件之间的距离的方法,所述方法包括:
12.根据权利要求11所述的方法,还包括:通过合并代表值的差异小于给定阈值的相同点的像素群组来形成合并的群组,并且针对所述合并的群组计算新的代表距离值。
13.根据权利要求12所述的方法,其中所述给定阈值是所述代表值的平均值的2%。
14.根据权利要求11所述的方法,其中将每个点的所述像素划分成像素群组包括执行分割算法。
15.根据权利要求14所述的方法,其中所述分割算法是划分成k均值的算法。
16.根据权利要求11所述的方法,其中将每个点的所述像素划分成像素群组包括:对每个点的所述像素的距离值执行直方图分析。
17.根据权利要求11所述的方法,其中将所述像素划分成像素群组包括:将距离值小于所述像素的所述距离的平均值的2%的像素进行分组。
18.根据权利要求11所述的方法,还包括:针对所述像素群组,去除所述距离值偏离所述群组中的其他像素的距离值的像素。
19.根据权利要求11所述的方法,其中所述图像的每个点包括一组10×10像素。
技术总结
本公开的实施例涉及用于测量距离的飞行时间传感器和方法。一种飞行时间传感器包括被配置为朝向场景发射光线的光发射设备和被配置为接收从场景反射的光信号并且生成图像的光敏像素矩阵,该图像包括与从场景反射的光信号相关联的点。每个点覆盖图像的数个像素。处理单元被配置为针对图像的每个点,将点的像素划分成至少一个像素群组,并且针对每个像素群组,计算该像素群组的距离值的代表值。然后可以将代表距离值应用于像素群组中的每个像素。
技术研发人员:T·奥吉,J·泰西尔
受保护的技术使用者:意法半导体(格勒诺布尔2)公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!