车道线显示方法、装置、电子设备、车辆和介质与流程
本申请涉及人工智能技术中的智能交通、车联网领域,尤其涉及一种车道线显示方法、装置、电子设备、车辆和介质。
背景技术:
1、车机是一种安装于车辆中的车载信息产品的简称,可以具备收音机、地图导航、电话等功能。目前,车机执行地图导航时,可以在显示屏幕中显示地图以及虚拟的车辆。地图一般可以包括绘制的地图或实景地图,对于绘制地图或实景地图而言,地图中可以包括车道线,车道线是基于车机传入的信息直接显示获得。
2、但是,在实际应用中,车机信息的传入频率小于地图的刷新帧率,这就导致地图中显示的车道线的刷新频率不够及时,显示的车道线出现较为严重的停滞现象,降低用户体验。
技术实现思路
1、本申请提供一种车道线显示方法、装置、电子设备、车辆和介质,用以解决地图图像帧的刷新频率高于车道线的刷新频率,导致车道线的显示出现严重的停滞现象,地图图像和车道线的显示不同步问题。
2、第一方面,本申请提供一种车道线显示方法,包括:
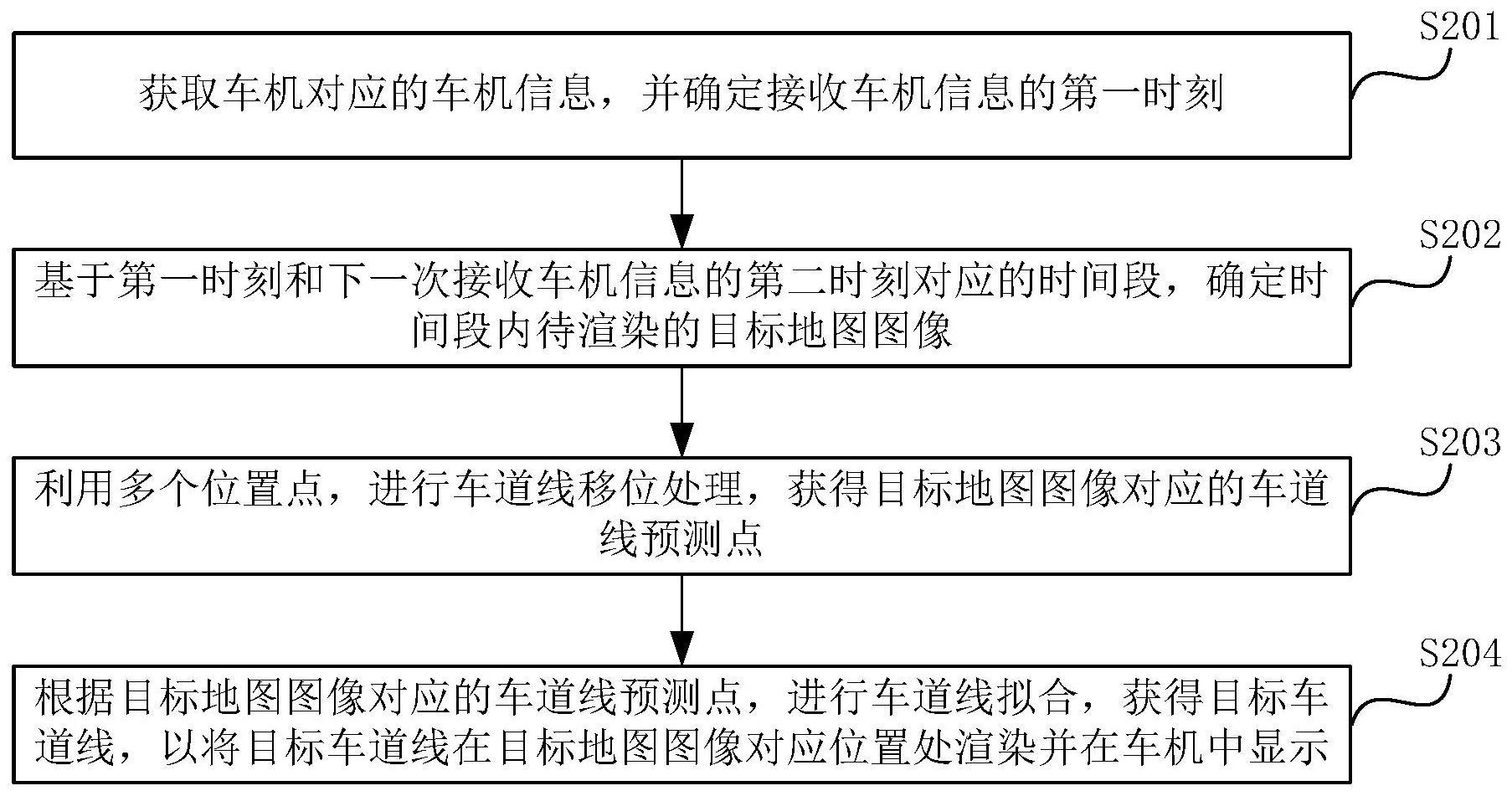
3、获取车机对应的车机信息,并确定接收所述车机信息的第一时刻,所述车机信息包括以车辆为中心采集的多个位置点;
4、基于第一时刻和下一次接收车机信息的第二时刻对应的时间段,确定所述时间段内待渲染的目标地图图像;
5、利用多个所述位置点,进行车道线移位处理,获得所述目标地图图像对应的车道线预测点;
6、根据所述目标地图图像对应的车道线预测点,进行车道线拟合,获得目标车道线,以将所述目标车道线在所述目标地图图像对应位置处渲染并在所述车机中显示。
7、第二方面,本申请提供一种车道线显示装置,包括:
8、信息接收单元,用于接收车机信息,并确定接收所述车机信息的第一时刻,所述车机信息包括以车辆为中心采集的多个位置点;
9、地图确定单元,用于基于第一时刻和下一次接收车机信息的第二时刻对应的时间段,确定所述时间段内待渲染的目标地图图像;
10、车道预测单元,用于利用多个所述位置点,进行车道线移位处理,获得所述目标地图图像对应的车道线预测点;
11、地图显示单元,用于根据所述目标地图图像对应的车道线预测点,进行车道线拟合,获得目标车道线,以将所述目标车道线在所述目标地图图像对应位置处渲染并显示。
12、第三方面,本申请提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
13、所述存储器存储计算机执行指令;
14、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面所提供的方法。
15、第四方面,本申请提供一种车辆,包括:车机,所述车机包括处理器,以及与所述处理器通信连接的存储器;
16、所述存储器存储计算机执行指令;
17、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面所提供的方法。
18、第五方面,本申请提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面所提供的方法。
19、本申请提供的方案中,电子设备可以接收获取车机对应的车机信息,并确定接收车机信息的第一时刻,第一时刻的车机信息可以直接渲染于相应的地图图像中。但是对于下一次接收车机信息的第二时刻与第一时刻所对应的时间段而言,可以确定时间段内待渲染的目标地图图像,实时获取待渲染的地图图像。对于获得的车机信息中的多个位置点,可以进行车道线移位处理,通过车道线移位处理,可以获得目标地图图像对应的车道线预测点,使得车道线预测点的位置与目标地图图像中实际的车道线相接近,进而可以利用目标地图图像对应的车道线预测点,进行车道线拟合,获得目标车道线,以将目标车道线和目标地图图像进行渲染并显示。在两次接收车机信息的间隙内,可以对待渲染的地图图像的车道线进行预测,获得与地图图像更匹配的车道线预测点,实现车道线和图像的同步移位,使得车道线和图像的显示更同步,避免出现车道线分段显示现象,实现连续性显示,提高用户体验。
技术特征:
1.一种车道线显示方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于第一时刻和下一次接收车机信息的第二时刻对应的时间段,确定所述时间段内待渲染的目标地图图像,包括:
3.根据权利要求1所述的方法,其特征在于,所述利用多个所述位置点,进行车道线移位处理,获得所述目标地图图像对应的车道线预测点,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述第一拟合公式和所述第二拟合公式的参数差异,确定所述目标地图图像的车道线对应的第三拟合公式,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述第二拟合公式与所述第一拟合公式的参数差异,确定所述目标地图图像对应的参数变化量,包括:
6.根据权利要求4所述的方法,其特征在于,所述根据所述第三拟合公式,结合多个所述位置点对应的位置取值范围,确定所述目标地图图像的车道线预测点,包括:
7.根据权利要求1所述的方法,其特征在于,所述根据所述目标地图图像对应的车道线预测点,进行车道线拟合,获得目标车道线,包括:
8.根据权利要求7所述的方法,其特征在于,所述采集所述车辆在所述目标地图图像与其前一个地图图像之间的车辆运行数据,包括:
9.根据权利要求8所述的方法,其特征在于,所述根据所述车辆运行数据,对所述目标地图图像对应的车道线预测点进行位置优化,获得优化后的目标位置点,包括:
10.根据权利要求9所述的方法,其特征在于,所述根据所述平均速度和所述平均转向角,对所述目标地图图像的车道线预测点,进行坐标平移计算,获得车体平移后的中间预测点,包括:
11.根据权利要求9所述的方法,其特征在于,所述中间预测点包括横向取值和纵向取值,所述根据所述平均转向角,对所述中间预测点进行坐标旋转计算,获得优化后的所述目标位置点,包括:
12.一种车道线显示装置,其特征在于,包括:
13.一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
14.一种车辆,包括:车机,所述车机包括处理器,以及与所述处理器通信连接的存储器;
15.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如权利要求1至11任一项所述的方法。
技术总结
本申请提供一种车道线显示方法、装置、电子设备、车辆和介质。该方法包括:获取车机对应的车机信息,并确定接收所述车机信息的第一时刻,所述车机信息包括以车辆为中心采集的多个位置点;基于第一时刻和下一次接收车机信息的第二时刻对应的时间段,确定所述时间段内待渲染的目标地图图像;利用多个所述位置点,进行车道线移位处理,获得所述目标地图图像对应的车道线预测点;根据所述目标地图图像对应的车道线预测点,进行车道线拟合,获得目标车道线,以将所述目标车道线在所述目标地图图像对应位置处渲染并在所述车机中显示。本申请的方法,车道线随图像的变化而变化,实现车道线和地图图像的同步且连续的显示变化,提高显示连续性。
技术研发人员:薛丛丛,王模军
受保护的技术使用者:合肥疆程技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!