一种泊车雷达系统标定工具使用方法与流程
本发明属于安全驾驶辅助,具体涉及一种泊车雷达系统标定工具使用方法。
背景技术:
1、泊车雷达系统是一种基于超声波雷达传感器探测车辆前后方障碍物的系统。通过与hu的交互,利用图像和声音对驾驶员进行障碍物碰撞警示。泊车雷达系统需要通过测试确认对障碍物方向及距离探测的准确性,防止因误报产生车辆碰撞的现象,通过特定路况进行测试验证。在此过程中,需要通过代码修改参数值,过程繁琐且操作门槛高,不利于平台化开发。
技术实现思路
1、本发明的目的就在于提供一种泊车雷达系统标定工具使用方法,以解决进行泊车雷达系统障碍物方向及距离探测的准确性测试时,需要通过代码修改参数值。过程繁琐且操作门槛高,不利于平台化开发的问题。
2、本发明的目的是通过以下技术方案实现的:
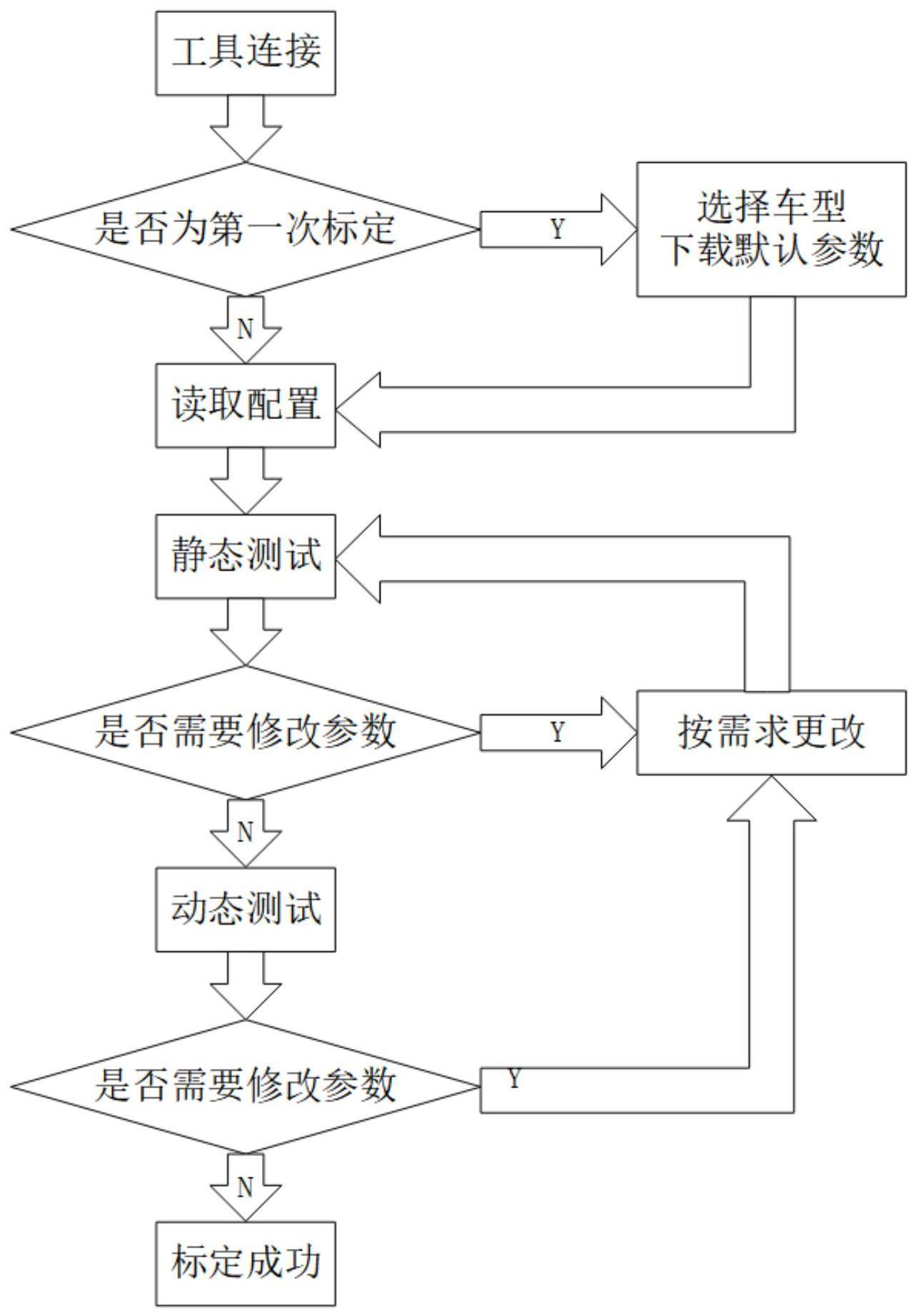
3、一种泊车雷达系统标定工具使用方法,包括以下步骤:
4、a、泊车雷达系统标定工具连接;
5、b、判断是否为第一次标定,若是,选择车型,下载系统参数和位置参数,若不是,直接执行下一步骤;
6、c、读取配置;
7、d、进行静态测试;
8、e、判断是否需要修改参数,若是,按要求更改后,返回步骤4,若不是,执行下一步骤;
9、f、进行动态测试;
10、g、判断是否需要修改参数,若是,按需求更改后,返回步骤4,若不是,标定成功。
11、进一步地,步骤a,具体为:在使用前,将泊车雷达系统标定工具与电脑端和车身obd口连接。
12、进一步地,步骤b,根据车型选择变速箱类型、epb、前、后雷达个数、avs配置、pdc硬开关、驱动能源类型、车型配置以及主探头位置。
13、更进一步地,变速箱类型选择为mt、at、dct或cvt,epb选择为机械或电子,avs配置选择为no或yes,pdc硬开关选择为no或yes,驱动能源类型选择为油车、纯电车或混动车,车型配置依据平台化借用方案选择。
14、进一步地,步骤b,根据前期雷达布置数据正确填写位置参数,包含各雷达高度、垂直安装角、外内偏安装角、安装间距。
15、进一步地,步骤b,下载默认参数后,根据前期要求设定三段报警范围:分别为35cm、90cm、150cm,设定雷达系统报警区域参数。
16、进一步地,步骤d,静态标定测试,分别为水平探测区域测试、垂直探测区域测试和测截止区域测试。
17、进一步地,步骤e,可对雷达探测能力和三段报警距离进行更改,修改任意参数后均需下载,下载成功后重新上电测试即可。
18、进一步地,步骤f,动态标定测试,分为低矮障碍物动态测试、快速倒车动态测试、路况动态测试。
19、更进一步地,路况动态测试分为水泥路、高速公路、搓板路、砂石路、比利时路、鹅卵石路。
20、与现有技术相比,本发明的有益效果是:
21、本发明泊车雷达系统标定工具使用方法,可有效简化修改参数的过程,使其变得易操作;同时,将此过程可视化,便于平台化管理,减少后续开发工作量。
技术特征:
1.一种泊车雷达系统标定工具使用方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种泊车雷达系统标定工具使用方法,其特征在于,步骤a,具体为:在使用前,将泊车雷达系统标定工具与电脑端和车身obd口连接。
3.根据权利要求1所述的一种泊车雷达系统标定工具使用方法,其特征在于,步骤b,根据车型选择变速箱类型、epb、前、后雷达个数、avs配置、pdc硬开关、驱动能源类型、车型配置以及主探头位置。
4.根据权利要求3所述的一种泊车雷达系统标定工具使用方法,其特征在于:变速箱类型选择为mt、at、dct或cvt,epb选择为机械或电子,avs配置选择为no或yes,pdc硬开关选择为no或yes,驱动能源类型选择为油车、纯电车或混动车,车型配置依据平台化借用方案选择。
5.根据权利要求1所述的一种泊车雷达系统标定工具使用方法,其特征在于:步骤b,根据前期雷达布置数据正确填写位置参数,包含各雷达高度、垂直安装角、外内偏安装角、安装间距。
6.根据权利要求1所述的一种泊车雷达系统标定工具使用方法,其特征在于:步骤b,下载默认参数后,根据前期要求设定三段报警范围:分别为35cm、90cm、150cm,设定雷达系统报警区域参数。
7.根据权利要求1所述的一种泊车雷达系统标定工具使用方法,其特征在于:步骤d,静态标定测试,分别为水平探测区域测试、垂直探测区域测试和测截止区域测试。
8.根据权利要求1所述的一种泊车雷达系统标定工具使用方法,其特征在于:步骤e,可对雷达探测能力和三段报警距离进行更改,修改任意参数后均需下载,下载成功后重新上电测试即可。
9.根据权利要求1所述的一种泊车雷达系统标定工具使用方法,其特征在于:步骤f,动态标定测试,分为低矮障碍物动态测试、快速倒车动态测试、路况动态测试。
10.根据权利要求9所述的一种泊车雷达系统标定工具使用方法,其特征在于:路况动态测试分为水泥路、高速公路、搓板路、砂石路、比利时路、鹅卵石路。
技术总结
本发明涉及一种泊车雷达系统标定工具使用方法,包括在使用前,将泊车雷达系统标定工具与电脑端和车身OBD口连接;判断是否为第一次标定,若是,选择车型,下载系统参数和位置参数,若不是,直接执行下一步骤;读取配置;进行静态测试;判断是否需要修改参数,若是,按要求更改后,返回静态测试步骤,若不是,执行下一步骤;进行动态测试;判断是否需要修改参数,若是,按需求更改后,返回静态测试步骤,若不是,标定成功。本发明泊车雷达系统标定工具使用方法,可有效简化修改参数的过程,使其变得易操作;同时,将此过程可视化,便于平台化管理,减少后续开发工作量。
技术研发人员:安美熹,王子军,王亮,王瑞琳,马文峰
受保护的技术使用者:一汽奔腾轿车有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!