一种针对水声定位的改进DOA方法及系统
本发明属于目标定位,具体涉及一种针对水声定位的改进doa方法及系统。
背景技术:
1、波达方向估计(direction of arrival,doa)是阵列信号处理的基本问题之一,也是雷达、声呐等众多领域的重要任务。
2、由于相干信号源的信号子空间与噪声子空间相互渗透,基阵安装存在误差等因素,导致空间协方差矩阵出现缺秩,传统的doa算法如music算法、esprit算法不能对信号进行有效分辨和测向,因此需要利用平滑算法对空间协方差矩阵的秩进行恢复。
3、toeplitz算法只考虑相邻水听器之间的距离相等,所以接收信号的相位差也相等,而针对多水听器的线阵,toeplitz算法并没有考虑其距离的倍数关系。
技术实现思路
1、针对现有技术波达方向估计算法在空间协方差矩阵出现缺秩时,不能对信号进行有效分辨和测向的问题,本发明的目的在于克服现有技术缺陷,提出了一种针对水声定位的改进doa方法及系统,基于相位校正和toeplitz校正。
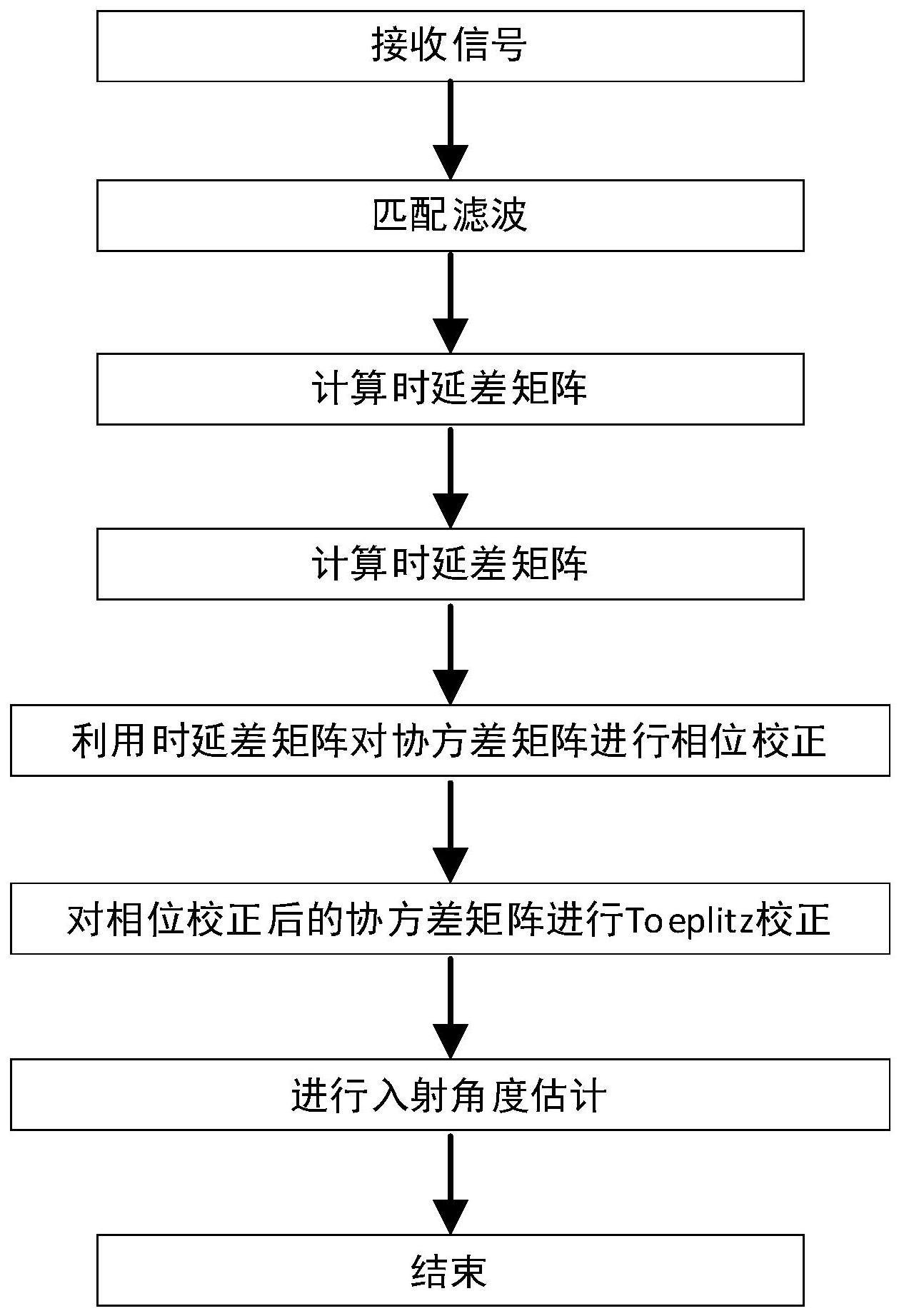
2、为了实现上述目的,本发明提出了一种针对水声定位的改进doa方法,所述方法包括:
3、步骤1)对线性基阵的接收信号进行预处理;所述线性基阵包括n个相邻距离均为d的基元;
4、步骤2)计算预处理后接收信号的协方差矩阵;
5、步骤3)根据接收信号的协方差矩阵,对1号基元和n号基元之间的相位差进行解模糊,得到解模糊后的相位;
6、步骤4)根据解模糊后的相位对预处理后接收信号的协方差矩阵进行相位校正;
7、步骤5)对相位校正后的协方差矩阵进行toeplitz校正;
8、步骤6)对经过相位校正和toeplitz校正后的协方差矩阵,利用doa算法进行入射角度估计。
9、作为上述方法的一种改进,所述步骤1)具体包括:
10、步骤1-1)判断接收信号是否为信标发射信号,判断为是,转至步骤1-2);判断为否,则重新接收信号;
11、步骤1-2)对接收信号x(t)进行匹配滤波得到信号x(t);
12、步骤1-3)对x(t)进行信号相关,得到n个基元的接收信号时延差timedelay:
13、
14、其中,timedelayab为第a号基元与第b号基元之间的接收信号时延差,a∈[1,n],b∈[1,n]。
15、作为上述方法的一种改进,所述步骤2)具体包括:
16、根据下式计算信号x(t)的协方差矩阵:
17、
18、其中,e(·)表示期望,(·)h表示矩阵的共轭转置,rab为第a号基元与第b号基元之间接收信号的协方差。
19、作为上述方法的一种改进,所述步骤3)具体包括:
20、步骤3-1)根据1号基元和n号基元之间的协方差r1n,由下式计算1号基元和n号基元之间的相位差θ1n:
21、
22、其中,j表示虚部;abs(·)表示取绝对值;
23、步骤3-2)根据步骤1-3)得到的时延差timedelay1n转换为对应的相位差θ1n′:
24、
25、其中c为声速,λ为波长;
26、步骤3-3)根据下式得到相位差的绝对值最大值|θ|max:
27、
28、步骤3-4)在(θ1n+2kπ)∈[-|θ|max,|θ|max]的范围内,k=±1,±2,…,找寻abs(θ1n+2kπ-θ1n′)的最小值得到对应k值,则θ1n″=θ1n+2kπ为解模糊后的相位。
29、作为上述方法的一种改进,所述步骤4)包括:
30、根据解模糊后的相位θ1n″对预处理后接收信号的协方差矩阵rxx进行相位校正,由下式得到相位校正后得到的协方差矩阵rxx′:
31、rxx′=γ×rxx
32、
33、其中,γ为介于0-1的相位校正系数。
34、作为上述方法的一种改进,所述步骤5)具体包括:
35、对相位校正后得到的协方差矩阵rxx′进行toeplitz校正,得到toeplitz校正后的协方差矩阵t(rxx′):
36、
37、其中,t(rxx′)的第i个元素m表示第m个基元,是ri的复数共轭。
38、作为上述方法的一种改进,所述步骤6)具体包括:
39、步骤6-1)采用幂法对toeplitz校正后的协方差矩阵t(rxx′)求特征分解,得到最大特征值;
40、步骤6-2)取最大特征值对应的特征向量ux构造第一子信号空间ux1与第二子信号空间ux2:
41、ux1=ux(1:n-1)
42、ux2=ux(2:n)
43、其中ux(1:n-1)表示取特征向量ux的前n-1个元素,ux(2:n)表示取特征向量ux、uy的后n-1个元素;
44、根据下式得到超短基线接收信号与坐标轴法线的夹角θ,从而实现入射角度估计:
45、
46、其中,右上角“+”表示求矩阵的伪逆,angle(·)表示求复数的相位,c表示声速,fc为接收信号的中心频率,d表示超短基线的阵元间距。
47、另一方面,本发明提出了一种针对水声定位的改进doa系统,所述系统包括:
48、预处理模块,用于对线性基阵的接收信号进行预处理;所述线性基阵包括n个相邻距离均为d的基元;
49、协方差矩阵计算模块,用于计算预处理后接收信号的协方差矩阵;
50、解模糊处理模块,用于根据接收信号的协方差矩阵,对1号基元和n号基元之间的相位差进行解模糊,得到解模糊后的相位;
51、相位校正模块,用于根据解模糊后的相位对预处理后接收信号的协方差矩阵进行相位校正;
52、toeplitz校正模块,用于对相位校正后的协方差矩阵进行toeplitz校正;和
53、doa模块,用于对经过相位校正和toeplitz校正后的协方差矩阵,利用doa算法进行入射角度估计。
54、与现有技术相比,本发明的优势在于:
55、1、toeplitz修正只考虑相邻均匀线阵基元之间的距离相等,所以接收信号的相位差也相等,而针对多基元的线阵,toeplitz修正并没有考虑其距离的倍数关系导致的相位差的倍数关系;采用本发明的方法针对多基元的线阵,考虑其距离的倍数关系导致的相位差的倍数关系;
56、2、基阵安装存在误差的情况下,随着基元间距的增大,相对误差减小,误差造成的影响降低,采用本发明的方法用距离较远的两个基元的协方差校正基阵的协方差矩阵,可以有效提高波达方向估计准确度。
技术特征:
1.一种针对水声定位的改进doa方法,所述方法包括:
2.根据权利要求1所述的针对水声定位的改进doa方法,其特征在于,所述步骤1)具体包括:
3.根据权利要求2所述的针对水声定位的改进doa方法,其特征在于,所述步骤2)具体包括:
4.根据权利要求3所述的针对水声定位的改进doa方法,其特征在于,所述步骤3)具体包括:
5.根据权利要求4所述的针对水声定位的改进doa方法,其特征在于,所述步骤4)包括:
6.根据权利要求5所述的针对水声定位的改进doa方法,其特征在于,所述步骤5)具体包括:
7.根据权利要求6所述的针对水声定位的改进doa方法,其特征在于,所述步骤6)具体包括:
8.一种针对水声定位的改进doa系统,其特征在于,所述系统包括:
技术总结
本发明属于目标定位技术领域,具体涉及一种针对水声定位的改进DOA方法及系统,所述方法包括:对线性基阵的接收信号进行预处理;所述线性基阵包括n个相邻距离均为d的基元;计算预处理后接收信号的协方差矩阵;根据接收信号的协方差矩阵,对1号基元和n号基元之间的相位差进行解模糊,得到解模糊后的相位;根据解模糊后的相位对预处理后接收信号的协方差矩阵进行相位校正;对相位校正后的协方差矩阵进行Toeplitz校正;对经过相位校正和Toeplitz校正后的协方差矩阵,利用DOA算法进行入射角度估计。采用本发明的方法用距离较远的两个基元的协方差校正基阵的协方差矩阵,可以有效提高波达方向估计准确度。
技术研发人员:熊长静,杨波,汪伟,刘烨瑶,李欣国,朱敏,潘锋
受保护的技术使用者:中国科学院声学研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!