路径规划方法、装置、电子设备及航线划设方法与流程
本发明属于空域轨迹的数据规划,尤其是涉及一种路径规划方法、装置、电子设备及航线划设方法。
背景技术:
1、新增航线划设是指根据需求或者规划,在航空交通管制区域内设置新的航路,以满足航空交通运输的需求。该过程需要考虑航路的路径、高度、速度等要素,并与周边航路进行协调,以确保安全性和效率性。新增航线划设通常需要进行前期规划、设计、评估和调整等多个阶段。在规划阶段,需要对航线的需求和可行性进行分析和研究,确定最佳的航线路径和高度。在设计阶段,需要对航线进行细化设计,并考虑航路的标识和导航设施等。在评估阶段,需要对航线的影响和效果进行评估,以确保航线的安全性和可行性。在调整阶段,需要根据实际情况对航线进行调整和优化。航线的划设对于提高航空交通的效率和安全性具有重要意义。
2、发明人在实施本技术方案的过程中发现,现有路径规划使用a*算法存在规划路径不合理,规划路径不平滑且稳定性不足的问题。
技术实现思路
1、针对现有技术中存在的问题,本发明提供了一种路径规划方法、装置、电子设备及航线划设方法,至少部分的解决现有技术中存在的规划路径不合理,规划路径不平滑且稳定性不足的问题。
2、第一方面,本公开实施例提供了一种路径规划方法,包括:
3、定义geosot网格图计算模型;
4、从第一列表中获取代价最小节点s,将节点s移入第二列表中,并将节点s作为当前节点,节点s为geosot网格图计算模型中的网格;
5、对节点s的节点集合进行扩展,得到节点s的父节点和扩展节点;
6、基于父节点和扩展节点得到规划路径;
7、所述第一列表为用于存放当前待扩展节点的列表,所述第二列表为用于存放已经访问过的节点列表。
8、可选的,所述对节点s的节点集合进行扩展,得到节点s的父节点和扩展节点,包括:对节点s的二十六相邻节点集合进行扩展。
9、可选的,所述对节点s的二十六相邻节点集合进行扩展,包括:
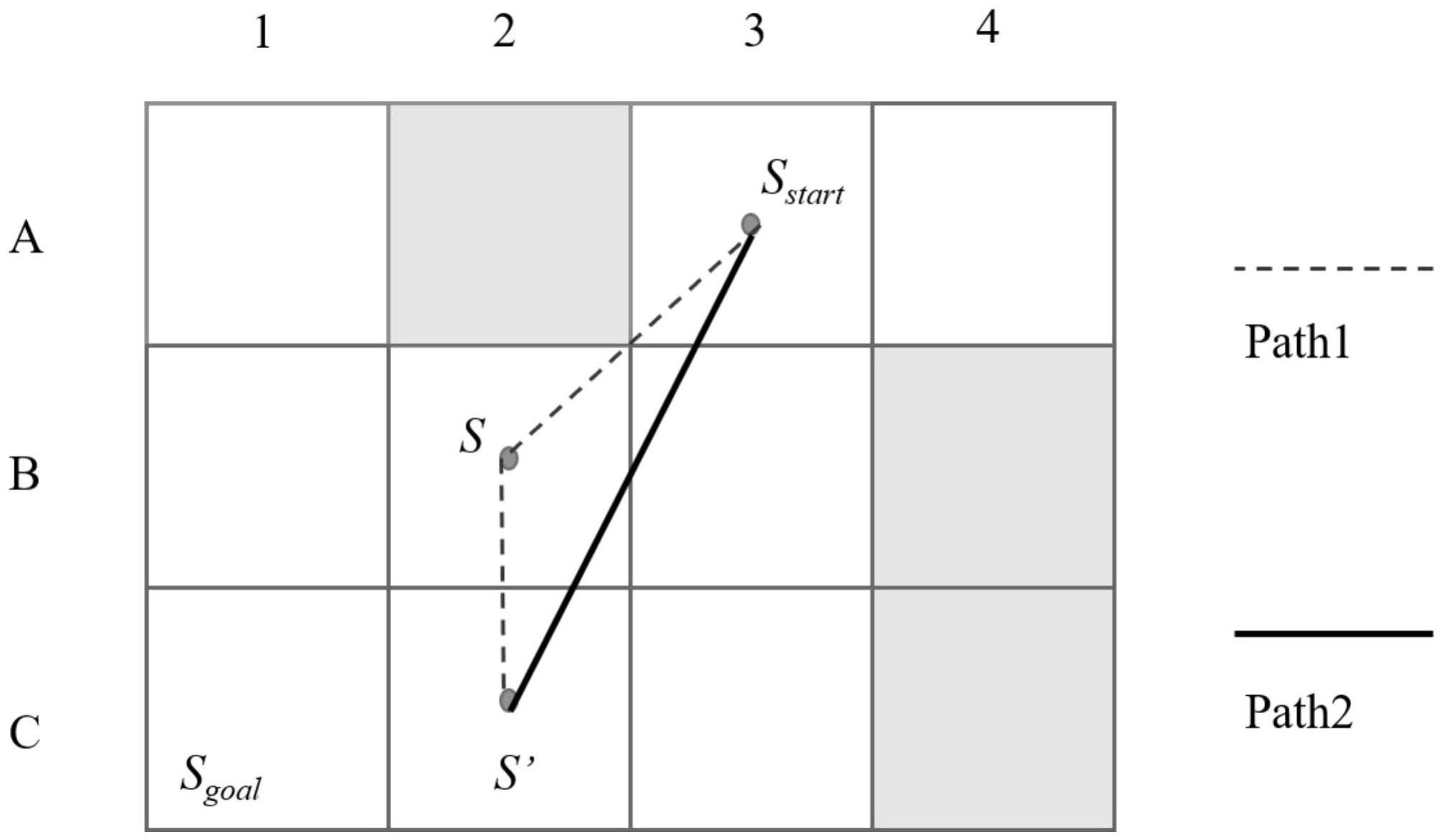
10、对节点s的父节点parent(s)与节点s'进行可视性检查,节点s'为二十六相邻节点集合中的节点;
11、若父节点parent(s)与节点s'可视,且s'的路径代价大于经父节点parent(s)到节点s'的路径代价,则指定节点s'的父节点为parent(s),并且令s'的路径代价等于经父节点parent(s)到节点s'的路径代价,视作节点s'已经存在于第一列表中,将节点s'更新或者插入到第一列表中;
12、若父节点parent(s)与节点s'不可视,且节点s'的路径代价大于经节点s到节点s'的路径代价,则指定s'的父节点为s,并令节点s'的路径代价等于经节点s到节点s'的路径代价,视作节点s'已经存在第一列表中,将节点s'更新或者插入到第一列表中。
13、可选的,所述从第一列表中获取代价最小节点s的步骤之前,从geosot网格图计算模型中获取起始节点s0,判断起始节点s0是否位于第一列表中。
14、可选的,所述从第一列表中获取代价最小节点s,将节点s移入第二列表中的步骤之后,包括:
15、判断节点s是否为目标节点sgoal,如节点s为目标节点sgoal,输出起始节点s0到目标节点sgoal的路径。
16、第二方面,本公开实施例还提供了一种航线划设方法,其特征在于,包括:
17、确定路径规划的起点网格、终点网格和非可飞行空域网格集合;
18、基于第一方面任一所述的路径规划方法获取起点网格到终点网格的可通行路径;
19、记录并更新当前路径,并绘制路径;
20、评估当前网格位置是否到达终点网格;
21、如没有到达终点网格,生成新网格节点;
22、评估新网格节点的启发函数与可飞行关系,得到评估结果;
23、基于评估结果将当前新网格节点作为起点网格。
24、第三方面,本公开实施例还提供了一种路径规划装置,包括:模型定义模块,用于定义geosot网格图计算模型;
25、获取模块,用于从第一列表中获取代价最小节点s,将节点s移入第二列表中,并将节点s作为当前节点,节点s为geosot网格图计算模型中的网格;
26、扩展模块,用于对节点s的节点集合进行扩展,得到节点s的父节点和扩展节点;
27、规划模块,用于基于父节点和扩展节点得到规划路径;
28、所述第一列表为用于存放当前待扩展节点的列表,所述第二列表为用于存放已经访问过的节点列表。
29、第四方面,本公开实施例还提供了一种航线划设装置,包括:
30、局部网格初始化模块,用于确定路径规划的起点网格、终点网格和非可飞行空域网格集合;
31、网格路径规划模块,用于基于第一方面任一所述的路径规划方法获取起点网格到终点网格的可通行路径;
32、路径记录与绘制模块,用于记录并更新当前路径,并绘制路径;
33、评估模块,用于评估当前网格位置是否到达终点网格;
34、生成模块,如没有到达终点网格,用于生成新网格节点;
35、关系模块,用于评估新网格节点的启发函数与可飞行关系,得到评估结果;
36、规划任务更新模块,用于基于评估结果将当前新网格节点作为起点网格。
37、第五方面,本公开实施例还提供了一种电子设备,该电子设备包括:
38、至少一个处理器;以及,
39、与所述至少一个处理器通信连接的存储器;其中,
40、所述存储器存储有能被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行第一方面任一所述的路径规划方法。
41、第六方面,本公开实施例还提供了一种计算机可读存储介质,该计算机可读存储介质存储计算机指令,该计算机指令用于使计算机执行第一方面任一所述的路径规划方法。
42、本发明提供的路径规划方法、装置、电子设备及航线划设方法。其中该路径规划方法,通过对节点进行扩展,得到节点s的父节点和扩展节点,基于父节点和扩展节点得到规划路径。规划的路线更短更平滑,且算法稳定性好,从而达到规划路径合理,规划路径平滑且稳定性高的目的。
技术特征:
1.一种路径规划方法,其特征在于,包括:
2.根据权利要求1所述的路径规划方法,其特征在于,所述对节点s的节点集合进行扩展,得到节点s的父节点和扩展节点,包括:对节点s的二十六相邻节点集合进行扩展。
3.根据权利要求2所述的路径规划方法,其特征在于,所述对节点s的二十六相邻节点集合进行扩展,包括:
4.根据权利要求1所述的路径规划方法,其特征在于,所述从第一列表中获取代价最小节点s的步骤之前,从geosot网格图计算模型中获取起始节点s0,判断起始节点s0是否位于第一列表中。
5.根据权利要求4所述的路径规划方法,其特征在于,所述从第一列表中获取代价最小节点s,将节点s移入第二列表中的步骤之后,包括:
6.一种航线划设方法,其特征在于,包括:
7.一种路径规划装置,其特征在于,包括:
8.一种航线划设装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质存储计算机指令,该计算机指令用于使计算机执行权利要求1-9任一所述的路径规划方法。
技术总结
本发明提供了一种路径规划方法、装置、电子设备及航线划设方法。其中,路径规划方法,包括:定义GeoSOT网格图计算模型;从第一列表中获取代价最小节点s,将节点s移入第二列表中,并将节点s作为当前节点,节点s为GeoSOT网格图计算模型中的网格;对节点s的节点集合进行扩展,得到节点s的父节点和扩展节点;基于父节点和扩展节点得到规划路径;所述第一列表为用于存放当前待扩展节点的列表,所述第二列表为用于存放已经访问过的节点列表。达到规划路径合理,规划路径平滑且稳定性高的目的。
技术研发人员:刘杰,任伏虎,伍学民,邓琛,王丽娜
受保护的技术使用者:北斗伏羲信息技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!