交会成像敏感器测量数据的有效性判断方法和装置与流程
本发明实施例涉及交会对接导航,特别涉及一种交会成像敏感器测量数据的有效性判断方法和装置。
背景技术:
1、平移靠拢段作为交会对接过程中的最后逼近阶段,是交会任务和对接任务的衔接,其飞行过程和控制精度直接决定了交会对接任务的成败,因此尤为重要。
2、在最后平移靠拢段,一般采用光学成像敏感器作为主要导航敏感器,来获取主动航天器与目标航天器的相对位置和相对姿态的导航信息,完成六自由度控制,实现这两个航天器的交会对接。而由于安全飞行距离、对接走廊、敏感器视场等约束条件的限制,单靠一台交会成像敏感器,无法完成整个最后平移靠拢段的相对测量,因此,通常会在主动航天器上配置多套交会成像敏感器,通过分别识别远、近场合作目标,接替完成最后平移靠拢段的相对测量。
3、然而,现有技术中,还没有对多套交会成像敏感器测量数据的有效性判断方法,这可能会影响空间交会对接导航系统的可靠性和安全性。
4、因此,亟需一种交会成像敏感器测量数据的有效性判断方法。
技术实现思路
1、为了解决由于没有交会成像敏感器测量数据的有效性判断方法,而影响空间交会对接导航系统的可靠性和安全性的问题,本发明实施例提供了一种交会成像敏感器测量数据的有效性判断方法和装置。
2、第一方面,本发明实施例提供了一种交会成像敏感器测量数据的有效性判断方法,应用于主动航天器的导航系统,所述主动航天器设置有至少两个交会成像敏感器,方法包括:
3、针对每一个测量周期,均执行:
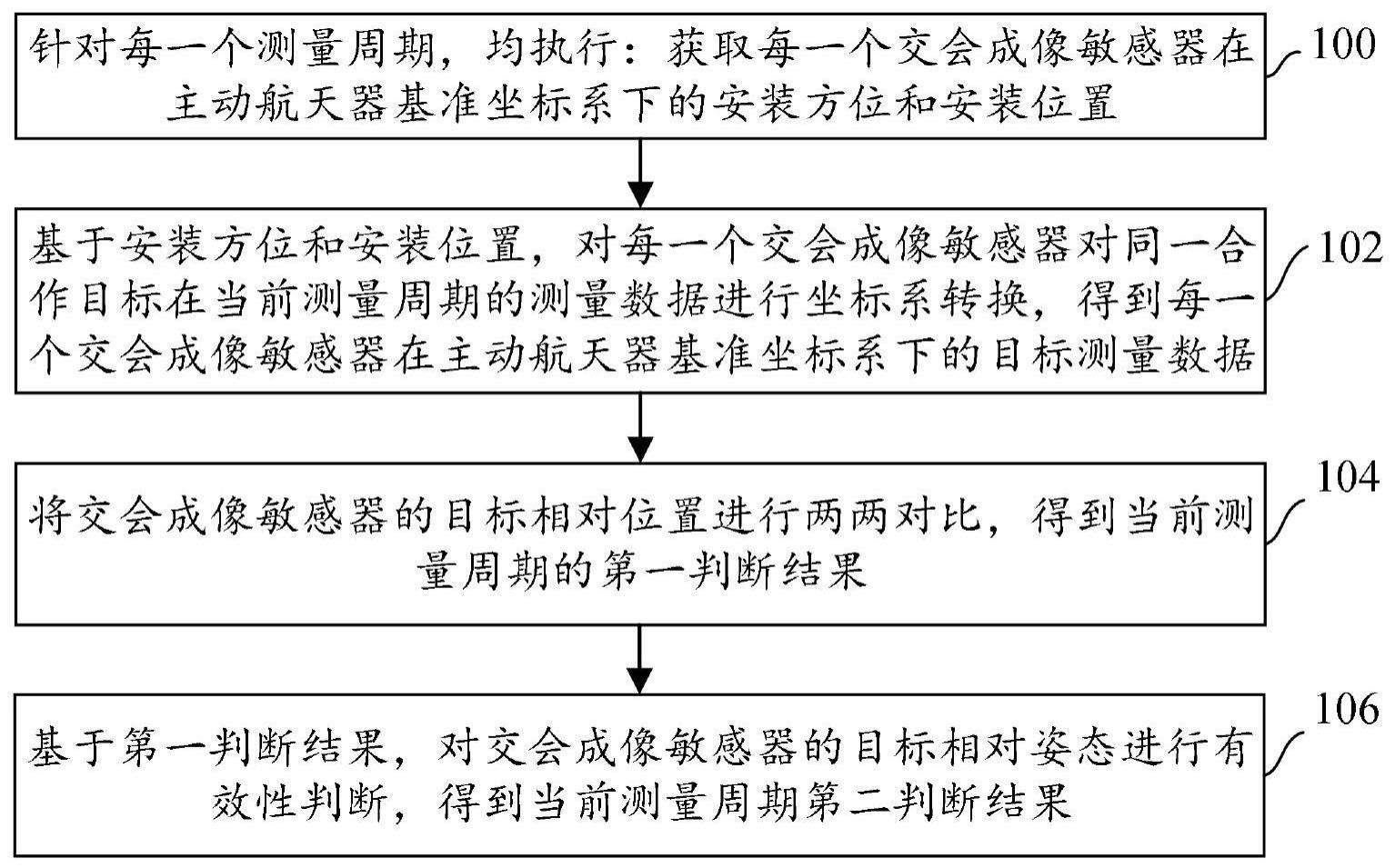
4、获取每一个所述交会成像敏感器在主动航天器基准坐标系下的安装方位和安装位置;
5、基于所述安装方位和所述安装位置,对每一个交会成像敏感器对同一合作目标在当前测量周期的测量数据进行坐标系转换,得到每一个所述交会成像敏感器在主动航天器基准坐标系下的目标测量数据;其中,所述测量数据包括相对位置和相对姿态,所述目标测量数据包括目标相对位置和目标相对姿态;
6、将所述交会成像敏感器的所述目标相对位置进行两两对比,得到当前测量周期的第一判断结果;
7、基于所述第一判断结果,对所述交会成像敏感器的目标相对姿态进行有效性判断,得到当前测量周期第二判断结果。
8、第二方面,本发明实施例还提供了一种交会成像敏感器测量数据的有效性判断装置,设置于主动航天器的导航系统,所述主动航天器设置有至少两个交会成像敏感器,装置包括:
9、获取单元,用于针对每一个测量周期,均执行:获取每一个所述交会成像敏感器在主动航天器基准坐标系下的安装方位和安装位置;
10、转换单元,用于基于所述安装方位和所述安装位置,对每一个交会成像敏感器对同一合作目标在当前测量周期的测量数据进行坐标系转换,得到每一个所述交会成像敏感器在主动航天器基准坐标系下的目标测量数据;其中,所述测量数据包括相对位置和相对姿态,所述目标测量数据包括目标相对位置和目标相对姿态;
11、第一判断单元,用于将所述交会成像敏感器的所述目标相对位置进行两两对比,得到当前测量周期的第一判断结果;
12、第二判断单元,用于基于所述第一判断结果,对所述交会成像敏感器的目标相对姿态进行有效性判断,得到当前测量周期第二判断结果。
13、第三方面,本发明实施例还提供了一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现本说明书任一实施例所述的方法。
14、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行本说明书任一实施例所述的方法。
15、本发明实施例提供了一种交会成像敏感器测量数据的有效性判断方法和装置,应用于主动航天器的导航系统,在每一个测量周期,均会首先获取每一个交会成像敏感器在主动航天器基准坐标系下的安装方位和安装位置,然后,基于安装方位和安装位置,分别对每一个交会成像敏感器对同一合作目标在当前测量周期的测量数据进行坐标系转换,得到每一个交会成像敏感器在主动航天器基准坐标系下的目标测量数据,即目标相对位置和目标相对姿态;那么,在将每一个交会成像敏感器的测量数据转换至主动航天器基准坐标系下之后,可以先将交会成像敏感器的目标相对位置进行两两对比,来得到当前周期的第一判断结果;在得到第一判断结果后,则基于第一判断结果,对交会成像敏感器的目标相对姿态进行有效性判断,得到当前测量周期的第二判断结果。本方案,能够通过多源数据融合,对每个交会成像敏感器提供的测量数据进行系统级有效性评判,可以提高空间交会对接导航系统的可靠性和安全性。
技术特征:
1.一种交会成像敏感器测量数据的有效性判断方法,其特征在于,应用于主动航天器的导航系统,所述主动航天器设置有至少两个交会成像敏感器,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述安装方位和所述安装位置,对每一个交会成像敏感器对同一合作目标在当前测量周期的测量数据进行坐标系转换,得到每一个所述交会成像敏感器在主动航天器基准坐标系下的目标测量数据,包括:
3.根据权利要求2所述的方法,其特征在于,所述相对位置是通过如下公式进行坐标系转换的:
4.根据权利要求1所述的方法,其特征在于,所述将所述交会成像敏感器的所述目标相对位置进行两两对比,得到当前测量周期的第一判断结果,包括:
5.根据权利要求4所述的方法,其特征在于,所述将每个交会成像敏感器在当前测量周期的目标相对位置与历史测量周期的目标相对位置进行对比,来确定当前测量周期的第一判断结果,包括:
6.根据权利要求1-5中任一项所述的方法,其特征在于,所述基于所述第一判断结果,对所述交会成像敏感器的目标相对姿态进行有效性判断,得到当前测量周期的第二判断结果,包括:
7.根据权利要求6所述的方法,其特征在于,所述相对姿态测量误差是通过如下公式进行计算的:
8.一种交会成像敏感器测量数据的有效性判断装置,其特征在于,设置于主动航天器的导航系统,所述主动航天器设置有至少两个交会成像敏感器,包括:
9.一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行权利要求1-7中任一项所述的方法。
技术总结
本发明涉及交会对接导航技术领域,特别涉及一种交会成像敏感器测量数据的有效性判断方法和装置。其中,方法应用于主动航天器的导航系统,包括:获取每一个交会成像敏感器在主动航天器基准坐标系下的安装方位和安装位置;基于安装方位和安装位置,对每一个交会成像敏感器对同一合作目标在当前测量周期的测量数据进行坐标系转换,得到每一个交会成像敏感器在主动航天器基准坐标系下的目标测量数据;将交会成像敏感器的目标相对位置进行两两对比,得到当前测量周期的第一判断结果;基于第一判断结果,对交会成像敏感器的目标相对姿态进行有效性判断,得到当前测量周期第二判断结果,以此来提高空间交会对接导航系统的可靠性和安全性。
技术研发人员:张昊,王志毅,张一,解永春,胡军,奚坤
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!