消除双层空基导航增强自组网杠杆效应的故障检测方法
本发明属于导航增强,具体涉及一种消除双层空基导航增强自组网杠杆效应的故障检测方法。
背景技术:
1、布设在临近空间的空基导航增强自组网会受到多种潜在的异常因素的影响,真实分布未知,呈现非高斯性,从而节点在少数情况下产生较大的定位偏差,导致测距误差特征参数与误差包络特征参数不符。此时,用户继续使用误差包络特征参数所计算的保护级将无法以指定概率包络定位误差。同时,导航增强自组网中节点的协同定位机制导致节点测距误差存在相关性,飞艇的定位误差间存在复杂的非线性关联关系。同时,每个节点状态的变化都会随着这种协作关联关系在网络中传播和扩散,单一节点的异常定位误差会在多个节点的耦合作用下扩散至整个自组网中,即如果其中一个节点存在较大定位误差,该误差将通过协同定位影响自组网中的其他节点,从而产生较大的定位偏差。单个节点的异常若不及时发现和排除,则会影响临近多个节点的性能。
2、为保障复杂条件下的稳定组网,导航增强自组网应能够自主对故障进行检测并排除受影响的节点。由于导航增强自组网节点间协同定位,采用滤波的方式进行信息融合,故难以采用类似现有raim技术的快照方法。
3、并且,对于双层网络构型,对于下层节点而言,上层节点对其观测几何构型的影响高于同层节点,从而对定位误差有不同的影响,称为杠杆效应。杠杆效应产生的定位误差影响也会对故障检测造成影响。
技术实现思路
1、鉴于上述的分析,本发明旨在公开了一种消除双层空基导航增强自组网杠杆效应的故障检测方法,用于消除杠杆效应,实现故障节点的检测与排除。
2、本发明公开了一种消除双层空基导航增强自组网杠杆效应的故障检测方法,包括:
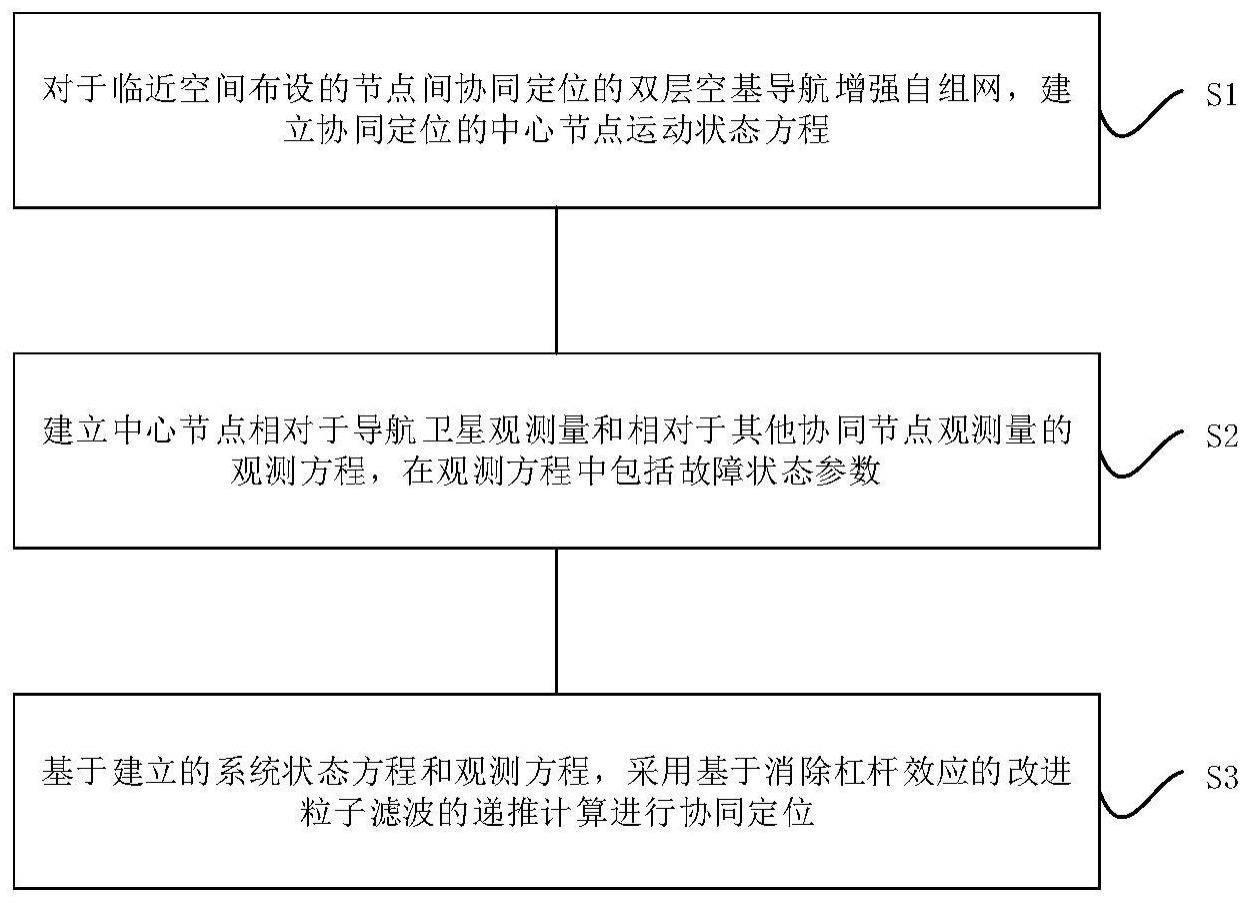
3、对于临近空间布设的节点间协同定位的双层空基导航增强自组网,建立协同定位的中心节点运动状态方程;
4、建立中心节点相对于导航卫星观测量和相对于其他协同节点观测量的观测方程,在观测方程中包括故障状态参数;
5、基于建立的系统状态方程和观测方程,采用基于消除杠杆效应的改进粒子滤波的递推计算进行协同定位;
6、所述改进粒子滤波中,基于双层结构几何构型的杠杆效应,在粒子重要性采样时,考虑当前时刻观测量中的故障对似然概率密度函数的峰值和形状的共同影响,通过构造的重要性密度,将当前观测信息加入到建议分布中产生粒子,使得抽样的粒子更接近高似然区域,得到无故障情况下和故障情况下的似然概率密度进行似然比检验;并对检测出的故障节点进行标识和隔离。
7、进一步地,所述空基导航增强自组网的双层结构几何构型中包括上、下两层网络;下层网络中任意三个邻居节点构成等边三角形;上层网络的每一个节点均位于由下层邻居节点构成的等边三角形的质心正上方,一个上层节点和对应的三个下层节点构成三棱锥型;
8、在进行节点间协同定位时,每个作为协同定位的中心节点的网络节点仅与其直接相邻的各网络节点进行相互协同;最大协同距离为下层网络中的节点与其最近的邻居节点的距离。
9、进一步地,构造的当前时刻的重要性密度为混合密度:
10、
11、在故障情况下,当前时刻的似然密度和前一时刻状态的预测似然均引入了最新观测信息,考虑了节点的故障影响。
12、进一步地,中心节点运动状态方程为:
13、xk=fk(xk-1,uk-1);
14、其中,fk()代表状态方程;xk、xk-1分别为k、k-1时刻的节点运动状态,uk-1为状态转移噪声;
15、节点运动状态
16、其中,(xk,yk,zk)为k时刻节点的gnss接收机天线在ecef坐标系中的位置,为速度,为加速度,bk为接收机钟差,为钟漂;
17、中心节点相对协同节点及卫星的观测方程:
18、
19、hs,k()代表卫星观测方程,为对n颗导航卫星观测的伪距误差矢量;hf,k()代表协同节点相对观测方程,为对m个节点相对测距误差矢量;θ为故障状态参数。
20、进一步地,使用θj表示与故障节点j相对应的故障状态参数;
21、θj={b,μj};
22、其中b为故障偏差,μj为(n+m)×1维的故障模式矢量;当检测出第j个节点故障,则将μj中与第j个节点对应的第j行置为1(n+1≤j≤n+m);
23、当故障为单故障模式时,有且只有一个与故障节点j对应的第j行为1,其他元素为0;
24、当故障为多故障模式时,μj中除主故障节点j对应的第j行为1时,还将由于主故障节点j连带造成的其他子故障节点对应的其他行置1。
25、进一步地,在导航增强自组网构型中,多故障模式包括:
26、(1)m1:对下层中心节点x,临近下层节点y出现故障,上层中在连接点x、y的线段两侧,存在两个离节点y最近的上层节点y1和y2,由于主节点y的故障导致y1和y2故障为m1故障;
27、(2)m2:对下层中心节点x,临近上层节点y出现故障,下层中在点x到点y射线方向的两侧,存在两个离节点y最近的下层节点y1和y2,由于主节点y的故障导致y1和y2故障为m2故障;
28、(3)m3:对上层中心节点x,临近上层节点y出现故障,下层中在连接点x、y的线段两侧,存在两个离节点y最近的节点下层y1和y2,由于主节点y的故障导致y1和y2故障为m3故障;
29、(4)m4:对上层中心节点x,临近下层节点y出现故障,上层中在点x到点y射线方向的两侧,存在四个离节点y最近的上层节点y1、y2、y3和y4,由于主节点y的故障导致y1、y2、y3和y4故障为m4故障。
30、进一步地,采用改进粒子滤波的递推计算进行协同定位过程包括:
31、步骤s2-1、进行包括递推时刻、节点状态、粒子集合和故障检测阈值初始化在内的粒子滤波初始化;
32、步骤s2-2、进行递推计算,对于当前时刻k,构造包括协同定位的全节点集合和与有节点隔离后的各隔离子集合的观测量;
33、步骤s2-3、分别对各个集合,利用构造的重要性密度进行重要性采样,根据k-1时刻粒子获得k时刻全节点集合与隔离子集合对应的先验粒子;
34、步骤s2-4、根据全节点集合的先验粒子计算的状态观测似然概率密度和故障子集合的先验粒子计算的状态观测似然概率密度,构造出故障检测的检验统计量;
35、步骤s2-5、利用检验统计量进行故障检测,若发现故障节点,在故障状态参数中对检测出的故障节点进行标识;
36、循环步骤s2-2~s2-5,先进行单个节点隔离后的故障检测,在检测出故障节点后,以故障节点为主节点,确定出相关多故障模式对应的相关节点,分别进行节点隔离后的故障检测,直至检测出所有故障节点,并在故障状态参数中进行标识后,进入步骤s2-6;
37、步骤s2-6、排除所有的故障节点的观测值后,利用重要性采样的粒子进行状态更新;返回步骤s2-2进行下一时刻的粒子滤波。
38、进一步地,步骤s2-3中重要性采样后,
39、全节点集合o下粒子:
40、其中,
41、
42、
43、
44、
45、
46、为全节点集合o下的状态量,为全节点集合o下先验粒子,为全节点集合o下线性化的相对测距量观测矩阵,为全节点集合o下k-1时刻的状态转移噪声矢量uk-1的方差;为全节点集合o下,协同节点相对测距误差矢量的方差;
47、隔离子集合j下粒子:
48、其中,
49、
50、
51、
52、
53、为隔离子集合j下的状态量,为隔离子集合j下先验粒子,为隔离子集合j下线性化的相对测距量观测矩阵,为隔离子集合j下k-1时刻的状态转移噪声矢量uk-1的方差去掉第j行得到;为协同节点相对测距误差矢量的方差去掉第j行得到;为去掉第j行得到。
54、进一步地,步骤s2-4具体包括:
55、1)估计全节点集合的似然概率密度隔离子集合j的似然概率密度
56、全节点集合的先验粒子计算的状态观测似然概率密度
57、
58、δk、sk分别为对全节点集合的新观测值的似然概率进行估计的观测残差和残差方差;
59、隔离子集合j的先验粒子计算的状态观测似然概率密度
60、
61、分别为对隔离子集合j的新观测值的似然概率进行估计的观测残差和残差方差。
62、2)故障状态参数θj的计算对数似然比;
63、对于隔离节点j故障下的故障状态参数θj的对数似然比:
64、
65、3)累加对数似然比;
66、
67、w为计算检测统计量的滑动窗长度;
68、4)构造的检验统计量lrtk(θj),其为累加对数似然比最大值:
69、
70、进一步地,在单个节点隔离后的故障检测中,检测出故障节点后,根据故障节点为上层节点或下层节点,以及与中心节点的位置关系,确定出多故障模式的种类m1、m2、m3或m4;根据多故障模式种类所对应的节点,依次去掉主故障节点和其他子故障节点构建隔离子集合,循环步骤s2-2~s2-5的故障检测过程,利用去掉主故障节点、其他子故障节点的隔离子集合mj的似然函数和去掉主故障节点的隔离子集合j的似然函数构造似然比,若检测出故障,则判断为该主节点故障的多节点故障;若检测不出故障,则判断为该主节点故障的单节点故障。
71、本发明可实现以下有益效果:
72、本发明公开的消除双层空基导航增强自组网杠杆效应的故障检测方法,对于节点间协同定位的双层空基导航增强自组网,考虑当前时刻观测量中的故障对似然概率密度函数的峰值和形状的共同影响,构造重要性密度,将当前观测信息加入到建议分布中产生粒子,使得抽样的粒子更接近高似然区域;再通过对数似然比检验进行故障节点的检测与排除。克服了杠杆效应的影响,避免了故障节点的定位偏差在网络中传播和扩散,保证了定位的精度。
- 还没有人留言评论。精彩留言会获得点赞!