一种建筑检测无人机空鼓面积计算方法及系统与流程
本发明涉及无人机应用,特别是一种建筑检测无人机空鼓面积计算方法。
背景技术:
1、目前建筑物建设过程中及使用过程中都有质量检测及养护的需求,因此需要对建筑物的质量进行检测及养护工作。传统的检测和养护的方式是通过人员高空作业,由人员携带设备对建筑物进行检测和养护,针对墙面空鼓的检测,一般是采用人工敲击听音方式,利用工具锤敲击外墙饰面依靠检测人员的经验听声音来进行检测判断,该检测方式由于受限于检测条件无法一次对很大面进行检测,检测劳动强度大、效率较低。
技术实现思路
1、本发明的发明目的是,针对上述问题,提供一种建筑检测无人机空鼓面积计算方法,采用网格化敲击检测实现建筑面空鼓面积计算。
2、为达到上述目的,本发明所采用的技术方案是:
3、一种建筑检测无人机空鼓面积计算方法,包括以下内容:
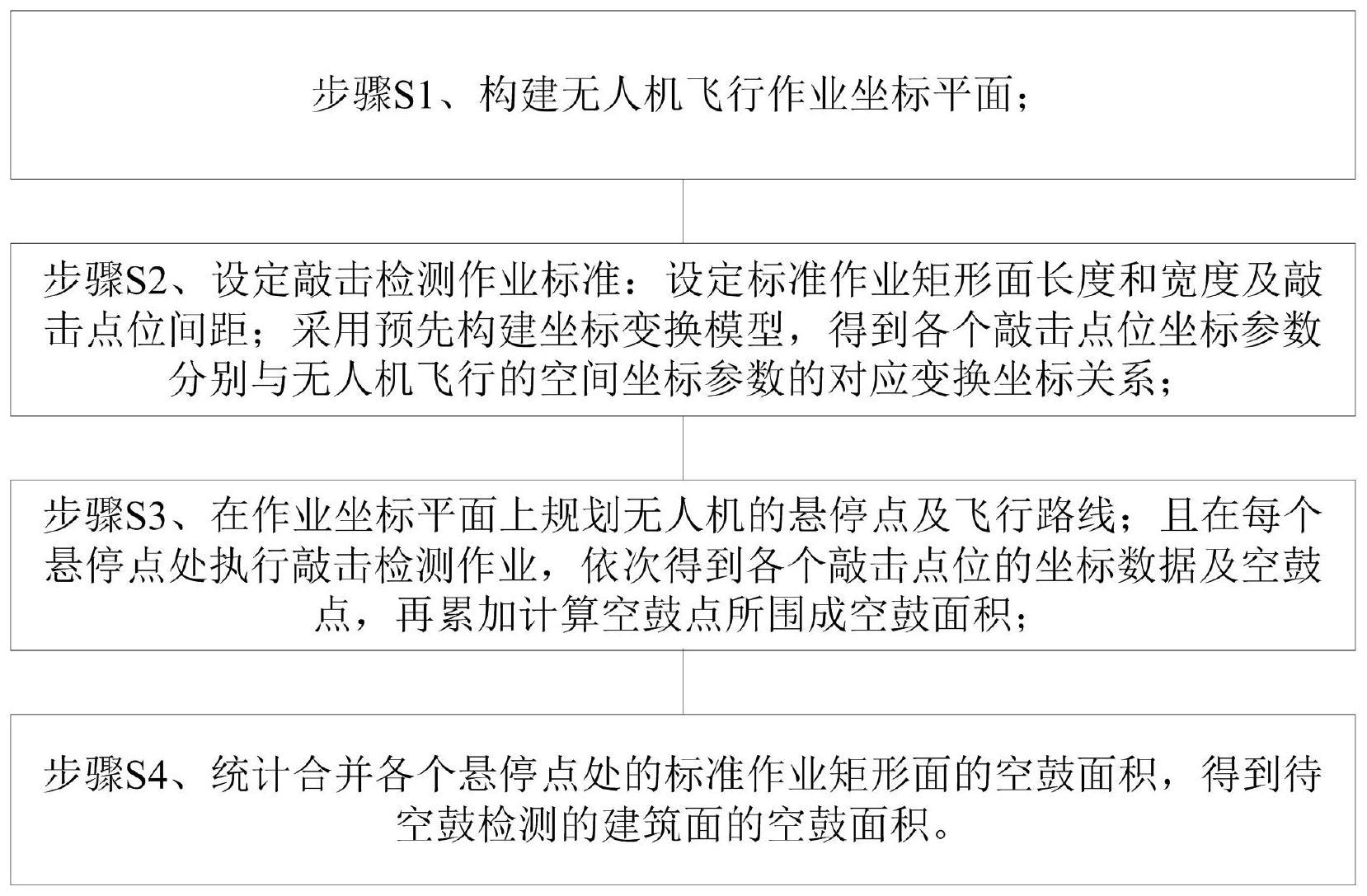
4、步骤s1、构建无人机飞行作业坐标平面:在待空鼓检测的建筑面外一定安全距离处构建一平行于建筑面的作业坐标平面,以使无人机将在作业坐标平面覆盖悬停飞行;
5、步骤s2、设定敲击检测作业标准,包括:步骤s21、定义无人机在每个悬停飞行点位时所能够对建筑面进行敲击检测作业的方形覆盖区域为标准作业矩形面,设定标准作业矩形面长度和宽度及敲击点位间距,在标准作业矩形面沿水平向及竖向按敲击点位间距布置得到各个敲击点位;步骤s22、采用预先构建坐标变换模型,确定得到各个敲击点位情形下机械臂的探伸长度及角度,更新得到各个敲击点位坐标参数分别与无人机飞行的空间坐标参数的对应变换坐标关系;
6、步骤s3、在作业坐标平面上规划无人机的悬停点及飞行路线,以标准作业矩形面长度为悬停点水平向间距,以标准作业矩形面宽度为悬停点竖向间距,按预设飞行路线逐一对各个悬停点进行悬停飞行任务;且在每个悬停点处执行敲击检测作业,依次得到各个敲击点位的坐标数据及空鼓点,再累加计算空鼓点所围成空鼓面积;敲击检测作业的具体处理流程如下:
7、确定当前敲击点位:基于标准作业矩形面初始敲击点位以及当前悬停点,跳过在先悬停点处标准作业矩形面外周已经执行敲击作业的在先敲击点位,确定在当前悬停点将要进行敲击作业的当前敲击点位;
8、获取当前敲击点位坐标数据:基于当前悬停点坐标数据,利用坐标变换模型得到各个当前敲击点位坐标数据;
9、敲击点位检测判断:在当前悬停点处按沿水平向逐行往返或沿竖向逐列往返敲击轨迹,逐一对标准作业矩形面的当前敲击点位进行敲击检测作业,依次获取各个当前敲击点位的敲击数据,并据此判断当前敲击点位是否为空鼓点;
10、计算标准作业矩形面空鼓面积:基于当前悬停点的空鼓点坐标数据,随着敲击作业执行,逐步计算相邻3个空鼓点所围成三角面积,然后累加计算以得到当前悬停点处的标准作业矩形面的空鼓面积;
11、步骤s4、统计合并各个悬停点处的标准作业矩形面的空鼓面积,得到待空鼓检测的建筑面的空鼓面积。
12、其中,步骤s2的坐标变换模型的处理过程如下:根据设定的标准作业矩形面长度和宽度及作业坐标平面安全距离,确定得到标准作业矩形面四个顶点作为敲击点位情形下无人机机械臂的探伸长度及角度;再,根据设定的敲击点位间距,确定得到各个敲击点位情形下机械臂的探伸长度及角度;再,根据各个敲击点位情形下机械臂的探伸长度及角度与作业坐标平面安全距离,得到各个敲击点位坐标参数分别与无人机飞行的空间坐标参数的对应变换坐标关系。
13、基于前述方案,在一改进方案中,步骤s2的坐标变换模型的处理过程还如下内容:以标准作业矩形面四个敲击点位顶点之一作为参照点,校对各个敲击点位情形下机械臂的探伸长度及角度,更新得到各个敲击点位的已校对变换坐标关系。如此,起到校对提高精度作用。
14、前述方案为提高工作效率可进行大间距一次敲击,在一改进方案中,为了进一步提高空鼓检测精度,步骤s3的敲击检测作业还包括复检处理模式,此时计算标准作业矩形面空鼓面积步骤的处理流程为:判断相邻两行两列所覆盖4个当前敲击点位其中3个点位所围成直角三角形面是否存在空鼓边界;若存在空鼓边界则在当前直角三角形面的空鼓点与实心点位之间区域按复检间距进行敲击检测作业,进而,基于当前悬停点的空鼓点坐标数据,随着敲击作业执行,逐步计算当前直角三角形面的相邻3个空鼓点所围成三角面积,否则逐步计算当前直角三角形面的面积,然后累加计算以得到当前悬停点处的标准作业矩形面的空鼓面积。如此,可针对一次敲击空鼓点位与实心点位之间区域进行小间距二次敲击复检测,有效提高整体空鼓检测精度。其中,步骤s3的敲击检测作业在复检处理模式下,计算标准作业矩形面空鼓面积步骤的具体处理流程如下:
15、判断空鼓边界:逐个标定当前敲击点位为空鼓点或实心点,实时判断相邻两行两列所覆盖4个当前敲击点位其中3个点位所围成直角三角形面是否存在空鼓边界;当该直角三角形面3个当前敲击点位同时存在空鼓点和实心点时,判断为当前直角三角形面存在空鼓边界并执行计算空鼓边界空鼓面积操作,否则不存在空鼓边界并执行计算非空鼓边界空鼓面积操作;
16、计算空鼓边界空鼓面积:在当前直角三角形面边及其内周面上沿水平向及竖向按复检间距布置初步复检点位,然后将在直角三角形面的空鼓点顶点和实心点顶点连接线上的初步复检点位确定为敲击复检点位;逐一对当前直角三角形面的初步复检点位或敲击复检点位进行敲击检测作业,依次获取各个初步复检点位或敲击复检点位的敲击数据,并据此判断初步复检点位或敲击复检点位是否为空鼓点;基于当前悬停点坐标数据,利用坐标变换模型得到各个初步复检点位或敲击复检点位坐标数据;基于复检点位坐标数据,随着敲击作业执行,逐步计算当前直角三角形面的相邻3个空鼓点所围成三角面积,然后累加计算以得到当前直角三角形面的空鼓面积;其中敲击点位间距是复检间距的整数倍;
17、计算非空鼓边界空鼓面积:基于直角三角形面的3个空鼓点顶点坐标数据,随着敲击作业执行,逐步计算当前直角三角形面的面积;
18、累加计算空鼓面积:将空鼓边界空鼓面积和非空鼓边界空鼓面积进行累加计算,以得到当前悬停点处的标准作业矩形面的空鼓面积。
19、由于采用上述技术方案,本发明具有以下有益效果:
20、1.本发明采用标准作业矩形面内上下敲击点位等距离敲击的办法完成整个标准作业矩形面敲击检测(敲击点数不限),由紧靠的三个空鼓点位实现三角面积确定,然后累加定位标准作业矩形面内的空鼓面积,而整个墙体空鼓面积可统计合并n个标准作业矩形面内小空鼓面积完成,得到整个墙面的大空鼓面积甄别计算。
技术特征:
1.一种建筑检测无人机空鼓面积计算方法,其特征在于,包括以下内容:
2.根据权利要求1所述的一种建筑检测无人机空鼓面积计算方法,其特征在于:步骤s2的坐标变换模型的处理过程如下:根据设定的标准作业矩形面长度和宽度及作业坐标平面安全距离,确定得到标准作业矩形面四个顶点作为敲击点位情形下无人机机械臂的探伸长度及角度;再,根据设定的敲击点位间距,确定得到各个敲击点位情形下机械臂的探伸长度及角度;再,根据各个敲击点位情形下机械臂的探伸长度及角度与作业坐标平面安全距离,得到各个敲击点位坐标参数分别与无人机飞行的空间坐标参数的对应变换坐标关系。
3.根据权利要求2所述的一种建筑检测无人机空鼓面积计算方法,其特征在于:步骤s2的坐标变换模型的处理过程还如下内容:以标准作业矩形面四个敲击点位顶点之一作为参照点,校对各个敲击点位情形下机械臂的探伸长度及角度,更新得到各个敲击点位的已校对变换坐标关系。
4.根据权利要求1所述的一种建筑检测无人机空鼓面积计算方法,其特征在于:步骤s3的敲击检测作业还包括复检处理模式,此时计算标准作业矩形面空鼓面积步骤的处理流程为:判断相邻两行两列所覆盖4个当前敲击点位其中3个点位所围成直角三角形面是否存在空鼓边界;若存在空鼓边界则在当前直角三角形面的空鼓点与实心点位之间区域按复检间距进行敲击检测作业,进而,基于当前悬停点的空鼓点坐标数据,随着敲击作业执行,逐步计算当前直角三角形面的相邻3个空鼓点所围成三角面积,否则逐步计算当前直角三角形面的面积,然后累加计算以得到当前悬停点处的标准作业矩形面的空鼓面积。
5.根据权利要求4所述的一种建筑检测无人机空鼓面积计算方法,其特征在于:步骤s3的敲击检测作业在复检处理模式下,计算标准作业矩形面空鼓面积步骤的具体处理流程如下:
6.一种建筑检测无人机空鼓面积计算系统,其特征在于,包括以下内容:
7.根据权利要求6所述的一种建筑检测无人机空鼓面积计算系统,其特征在于:设定模块的坐标变换模型的处理过程如下:根据设定的标准作业矩形面长度和宽度及作业坐标平面安全距离,确定得到标准作业矩形面四个顶点作为敲击点位情形下无人机机械臂的探伸长度及角度;再,根据设定的敲击点位间距,确定得到各个敲击点位情形下机械臂的探伸长度及角度;再,根据各个敲击点位情形下机械臂的探伸长度及角度与作业坐标平面安全距离,得到各个敲击点位坐标参数分别与无人机飞行的空间坐标参数的对应变换坐标关系。
8.根据权利要求7所述的一种建筑检测无人机空鼓面积计算系统,其特征在于:设定模块的坐标变换模型的处理过程还如下内容:以标准作业矩形面四个敲击点位顶点之一作为参照点,校对各个敲击点位情形下机械臂的探伸长度及角度,更新得到各个敲击点位的已校对变换坐标关系。
9.根据权利要求6所述的一种建筑检测无人机空鼓面积计算系统,其特征在于:检测计算模块的敲击检测作业还包括复检模式,此时计算标准作业矩形面空鼓面积步骤的处理流程为:判断相邻两行两列所覆盖4个当前敲击点位其中3个点位所围成直角三角形面是否存在空鼓边界;若存在空鼓边界则在当前直角三角形面的空鼓点与实心点位之间区域按复检间距进行敲击检测作业,进而,基于当前悬停点的空鼓点坐标数据,随着敲击作业执行,逐步计算当前直角三角形面的相邻3个空鼓点所围成三角面积,否则逐步计算当前直角三角形面的面积,然后累加计算以得到当前悬停点处的标准作业矩形面的空鼓面积。
10.根据权利要求9所述的一种建筑检测无人机空鼓面积计算系统,其特征在于:检测计算模块的敲击检测作业在复检模式下,计算标准作业矩形面空鼓面积步骤的具体处理流程如下:
技术总结
本发明公开了一种建筑检测无人机空鼓面积计算方法及系统,属于无人机应用技术领域;本发明采用标准作业矩形面内上下敲击点位等距离敲击的办法完成整个标准作业矩形面敲击检测(敲击点数不限),由紧靠的三个空鼓点位实现三角面积确定,然后累加定位标准作业矩形面内的空鼓面积,而整个墙体空鼓面积可统计合并N个标准作业矩形面内小空鼓面积完成,得到整个墙面的大空鼓面积甄别计算。
技术研发人员:蒙朝搂,陈慕和,林春伟,唐婷,傅根根,程秉坤,杜善春,黄龙,姚晓,欧伟,梁海,郭佳,马龙敏
受保护的技术使用者:广西壮族自治区建筑工程质量检测中心有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!