基于双子帧障碍物识别的雷达盲区预警方法与流程
本发明属于障碍物检测,尤其涉及基于双子帧障碍物识别的雷达盲区预警方法。
背景技术:
1、变道过程中往往由于左右后视镜存在肉眼看不到后侧车辆的盲区造成的,特别是夜间行车和雨雾等恶劣天气行车,变道引起的事故会更加频繁。所以更多的车辆加装了盲点监测变道辅助雷达系统,它通过雷达传感器来监控我方车辆侧后方的区域,可以在一定范围内探测到邻近车道上其它的车辆当前坐标信息、车辆行驶速度和车辆行驶方向。但是,在车辆左侧附近存在金属护栏或绿化带等障碍物的场景下,雷达传播过程中会产生漫发射,多次反射和折射等电磁多径传播方式使得雷达天线接收端大概率出现虚假点云目标导致误报。
技术实现思路
1、针对上述问题,为了有效抑制金属护栏或绿化带等障碍物产生的多径虚警影响,本发明提出了一种双子帧障碍物识别的雷达盲区预警方法。它采用双子帧模式,两个子帧有着不同的最高检测距离和速度,雷达可实时收发的近距10m和远距80m两种波形配置的电磁波。近距10m配置有着较高的距离分辨率和点云数量,而远距80m配置有着较远的探测距离和速度分辨率。雷达系统可实时调用双子帧数据进行障碍物识别处理,两者相辅相成互为补充,这种预警方法可以显著的增强雷达环境适应性和稳定性。
2、本发明公开的基于双子帧障碍物识别的雷达盲区预警方法,包括以下步骤:
3、s1:配置毫米波双子帧雷达波形,通过天线收发电磁波,计算原始信号的往返时间来得到目标物距离,得到雷达的一维距离像数据;
4、s2:根据多发多收雷达体制的原理,计算不同接收天线收到同一目标反射的雷达波的相位差,得到目标的空间坐标信息,最终形成雷达距离方位谱;
5、s3:将雷达的雷达距离方位谱进行cfar恒虚警检测处理,可分别输出有效的近距10m和远距80m的目标点云数据;
6、s4:基于近距10m和远距80m两种波形配置点云分别进行障碍物识别处理,两种识别结果执行“或”操作得到总障碍物识别处理结果,输出并存储点云中障碍物相对雷达横坐标x_obstacle;
7、s5:当目标触发预警条件时,根据横坐标x_obstacle推算出障碍物的位置,过滤数据中障碍物外侧的无效数据目标点云,只保留障碍物内侧的目标点云。
8、进一步地,步骤s4包括:
9、步骤s41:根据雷达算法并行轮询10m配置和80m配置子帧中的点云;
10、步骤s42:从原始点云中筛选出符合条件的点云集合;
11、步骤s43:分别进行10m和80m配置障碍物识别处理,如果10m配置子帧点云满足上述10m配置障碍物识别的条件时将10m配置障碍物标志位置1,否则置0;同理,80m配置子帧点云满足上述80m配置障碍物识别的条件时将80m配置障碍物标志位置1,否则置0;
12、步骤s44:障碍物识别处理,存储满足上述条件的点云,10m和80m配置两种识别结果执行“或”操作,即只要有一种识别结果置1时,障碍物识别标志位置1;当两种识别结果都置0时,障碍物识别标志位置0;
13、步骤s45,根据步骤s44存储满足障碍物条件的点云集合进行聚类平均,并且计算出障碍物相对雷达的横向距离和纵向距离,最后输出障碍物相对雷达的横坐标x_obstacle。
14、进一步地,所述从原始点云中筛选出符合条件的点云集合,其中,10m配置障碍物识别的条件为:
15、当车速<10m/s且10m配置子帧点云速度与车速之差小于1m/s;
16、并且,点云能量大于30db且坐标满足0.8m<=x<=1.5m,1m<=y<=6m;
17、并且,点云的个数>2且y的展宽ymax-ymin>1m;
18、满足80m配置障碍物识别的条件:
19、点云速度与车速之差小于2m/s;
20、并且,点云能量大于20db且坐标满足0.5m<=x<=2.5m,1m<=y<=15m;
21、并且,点云的个数>3,y的展宽ymax-ymin>5m。
22、进一步地,步骤s5包括:
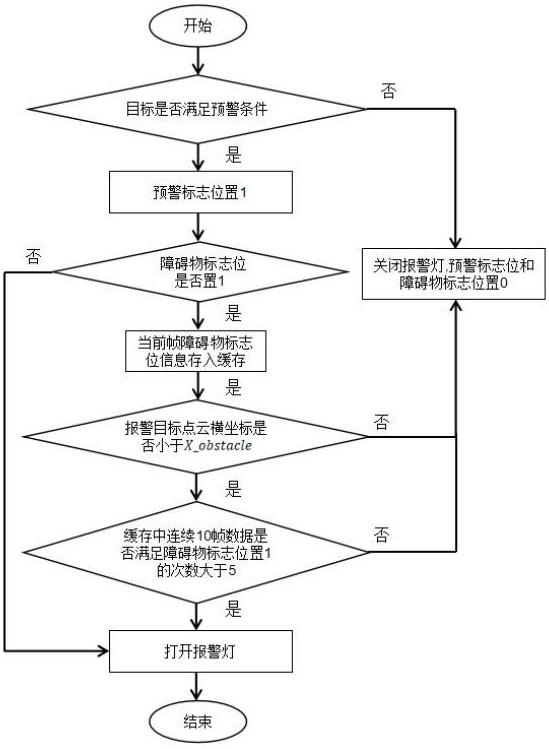
23、步骤s51:当目标满足预警条件时,预警标志位置1;
24、步骤s52:判断障碍物标志位是否置1,当雷达识别到障碍物标志位置1时,将当前帧数据存入缓存,随时间逐渐积累成10帧滚动滑窗数据;当雷达识别到障碍物标志位置0时,雷达系统直接打开报警灯预警;
25、步骤s53:判断当前帧的报警目标点云横坐标是否小于x_obstacle,如果,满足条件进入下一步,否则,关闭报警灯,预警标志位和障碍物标志位置0;
26、步骤s54:判断此刻缓存中连续10帧数据是否满足障碍物标志位置1的次数大于5,满足条件进入下一步,否则,关闭报警灯,预警标志位和障碍物标志位置0;
27、步骤s55:满足上述步骤s52,步骤s53和步骤s54条件时,雷达系统打开报警灯进行预警。
28、本发明的有益效果如下:
29、障碍物识别处理算法复杂度低,运算速度快,节约硬件内存空间;
30、通过相辅相成的近距10m(测距精度高)和远距80m(测速精度高)双子帧数据进行障碍物识别处理,可稳定有效的输出并存储满足识别条件的点云坐标计算出障碍物相对雷达的位置;
31、障碍物识别与雷达预警:根据总障碍物识别的10帧的滑窗结果,滤除数据中障碍物外侧的无效数据目标点云,只会对障碍物内侧的点云目标进行预警,该方法可抑制障碍物外侧对向车辆多径产生的无效误报同时也能探测到穿过障碍物内侧的两轮车和人目标。
技术特征:
1.基于双子帧障碍物识别的雷达盲区预警方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于双子帧障碍物识别的雷达盲区预警方法,其特征在于,步骤s4包括:
3.根据权利要求2所述的基于双子帧障碍物识别的雷达盲区预警方法,其特征在于,所述从原始点云中筛选出符合条件的点云集合,其中,10m配置障碍物识别的条件为:
4.根据权利要求3所述的基于双子帧障碍物识别的雷达盲区预警方法,其特征在于,步骤s5包括:
技术总结
本发明属于雷达技术领域,公开了基于双子帧障碍物识别的雷达盲区预警方法,包括步骤:得到雷达的一维距离像数据;计算不同接收天线收到同一目标反射的雷达波的相位差,形成雷达距离方位谱;将雷达距离方位谱进行CFAR恒虚警检测处理,可分别输出有效的近距和远距目标点云数据;基于两种波形配置点云进行障碍物识别处理,两种识别结果执行“或”操作得到总障碍物识别处理结果,输出并存储点云中障碍物相对雷达横向距离;当目标触发预警条件时,根据横坐标推算出障碍物的位置,只保留障碍物内侧的目标点云。本发明通过近距和远距双子帧数据进行障碍物识别处理,可计算出障碍物相对雷达的位置。
技术研发人员:杨博,孟钊,王荣强,虢俊
受保护的技术使用者:长沙莫之比智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!