一种基于线束光的条状物体角度检测方法与流程
本发明属于机械视觉检测,具体涉及一种基于线束光的条状物体角度检测方法。
背景技术:
1、在智能制造方面,一些情况下涉及条状物体的传输,条状物体在下落输送带进行输送的过程中,需要条状物体与传输带间保持一定的约束角度,即相对输送方向的倾斜角度要保持在一定范围内。如果超过该角度范围则条状物体有在后续处理中收到非正常挤压的问题。
2、例如,条状物体在输送带传输,需要与输送带大致平行的状态,倾斜角在-15到+15之间。常用的方法如图像模版方法检测条状物体的roi位置进而计算角度,或者使用条状物体图像与空输送带的图像差计算角度。若采用图像模版的方法,条状物体有新的外观需要匹配模版重新拍照和模版的再次注册。图像相减差的方法,在输送带出现脏污容易造成误检测同时条状物体的外观与输送带相似时,难以识别条状物体造成角度无检测。本发明的研发目的是寻找一种条状物体的角度检测方法,使检测对输送带成像没有要求,包括对输送带与条状物体外观成像和输送带是否脏污没有额外要求,同时希望检测时,即使条状物体更换外包装也不需要模版的注册。
技术实现思路
1、本发明的目的是提供一种基于线束光的条状物体角度检测方法,用于解决现有技术中检测对输送带与条状物体外观成像有要求,容易受表面脏污影响,以及难以在不重新注册的情况下,对外包装不同的条状物体进行检测的问题。
2、所述的一种基于线束光的条状物体角度检测方法,包括下列步骤:
3、第一步、设置检测区域,水平朝向所述条状物体的侧面投射线束光,采集包含线束光的条状物体图像;
4、第二步、对采集的包含所述线束光的图像进行二值化处理;
5、第三步、依据二值化后的图像拟合与线束光相关的两条直线;
6、第四步、计算一条直线在输送带方向的透视角;
7、第五步、拍摄正角度极限图像和负角度极限图像,检测确定所述透视角的角度阈值范围;
8、第六步、实际检测,计算得到待测的条状物体的透视角角度,将其与透视角的角度阈值范围比较,判断检测的倾斜角是否通过。
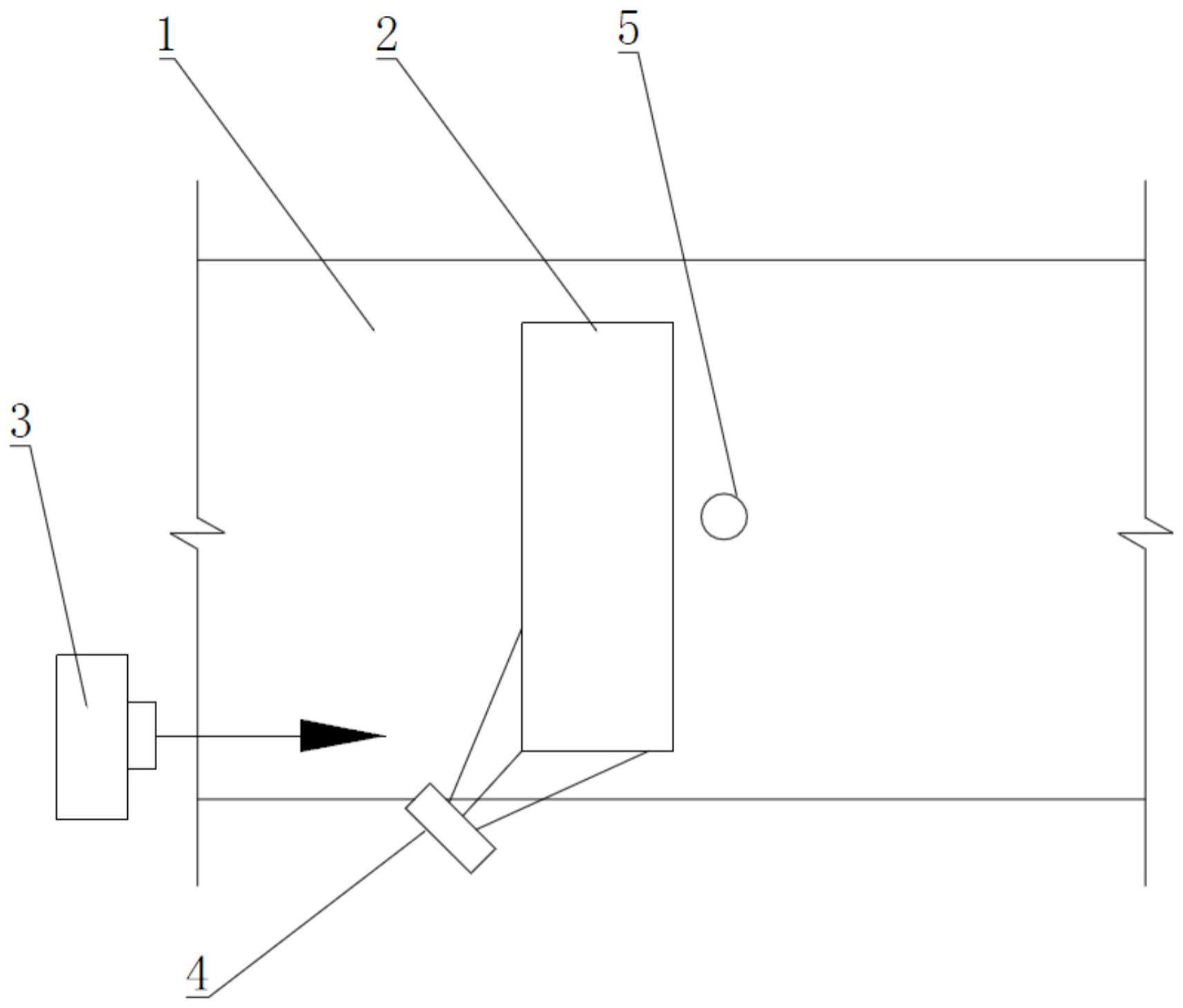
9、优选的,所述第一步包括:在检测区域中线束光源水平朝向所述条状物体的侧面投射线束光,所述线束光经过条状物体的一个棱边并在所述条状物体相邻的两个侧面上都形成高亮的线束光,所述图像采集装置朝向所述条状物体被投射线束光的部分采集图像,所述图像采集装置的图像采集方向与水平方向有一定夹角,使得采集到的条状物体上的线束光呈折线形状。
10、优选的,所述第二步中,二值化的公式如下所示,即low_val和up_val之间的灰度值为255,其它灰度值为0:
11、
12、其中bin_img为图像数据,表示将图像数据中的灰度值数据转化,bin_val_low表示二值化的阈值下限,bin_val_up表示二值化的阈值上限,gray_val表示图像数据的灰度值数据。
13、优选的,所述第三步中,在上一步得到的二值化图像中,从左往右做滑动窗口的平移,在滑动窗口内部做从上往下的第二个非零像素的坐标计算;得到一系列的坐标点后,采用霍夫直线检测得到由线束光图像形成的两条直线。
14、优选的,所述第四步中,取第一象限直线即直线斜率大于0的直线进行计算,透视角的角度a=arctan(k),k表示斜率。
15、优选的,所述第五步中,分别将条状物体摆设为处于倾斜角度正向极限和负向极限两种状态下,均依第一步至第四步过程完成检测,由此计算倾斜角度为正向极限时的条状物体测得的透视角角度a_min和倾斜角度为负向极限时的条状物体测得的透视角角度a_max,即角度阈值下限a_min和角度阈值上限a_max。
16、优选的,所述第六步中,检测区域设置光电触发相机的拍照孔,当条状物体经过时触发拍照,依据第一步至第四步的流程计算得到该条状物体的透视角角度a act,将其与透视角的角度阈值范围比较,若a_act>a_min而且a_act<a_max,则表明条状物体的倾斜角位于阈值范围内,表示检测通过,否则说明条状物体的倾斜角过大,并向检测人员反馈。
17、本发明具有以下优点:本发明的检测结果仅仅与条状物体的摆放方式有关,而与条状物体的大小、外观以及输送带的外观无关。因此既不用在条状物体外部包装改变时重新注册新的图像模板,也不易受条状物体或输送带表面是否受污染影响。因此,对不同外表和大小的条状物体检测具有更好地适应性,检测更加简便,并具有良好的可靠性。
技术特征:
1.一种基于线束光的条状物体角度检测方法,其特征在于:包括下列步骤:
2.根据权利要求1所述的一种基于线束光的条状物体角度检测方法,其特征在于:所述第一步包括:在检测区域中线束光源(4)水平朝向所述条状物体(2)的侧面投射线束光,所述线束光经过条状物体(2)的一个棱边并在所述条状物体(2)相邻的两个侧面上都形成高亮的线束光,所述图像采集装置朝向所述条状物体92)被投射线束光的部分采集图像,所述图像采集装置的图像采集方向与水平方向有一定夹角,使得采集到的条状物体(2)上的线束光呈折线形状。
3.根据权利要求1所述的一种基于线束光的条状物体角度检测方法,其特征在于:所述第二步中,二值化的公式如下所示,即low_val和up_val之间的灰度值为255,其它灰度值为0:
4.根据权利要求1所述的一种基于线束光的条状物体角度检测方法,其特征在于:所述第三步中,在上一步得到的二值化图像中,从左往右做滑动窗口的平移,在滑动窗口内部做从上往下的第二个非零像素的坐标计算;得到一系列的坐标点后,采用霍夫直线检测得到由线束光图像形成的两条直线。
5.根据权利要求1所述的一种基于线束光的条状物体角度检测方法,其特征在于:所述第四步中,取第一象限直线即直线斜率大于0的直线进行计算,透视角的角度a=arctan(k),k表示斜率。
6.根据权利要求1所述的一种基于线束光的条状物体角度检测方法,其特征在于:所述第五步中,分别将条状物体(2)摆设为处于倾斜角度正向极限和负向极限两种状态下,均依第一步至第四步过程完成检测,由此计算倾斜角度为正向极限时的条状物体(2)测得的透视角角度a_min和倾斜角度为负向极限时的条状物体(2)测得的透视角角度a_max,即角度阈值下限a_min和角度阈值上限a_max。
7.根据权利要求1所述的一种基于线束光的条状物体角度检测方法,其特征在于:所述第六步中,检测区域设置光电触发相机的拍照孔(5),当条状物体(2)经过时触发拍照,依据第一步至第四步的流程计算得到该条状物体(2)的透视角角度a_act,将其与透视角的角度阈值范围比较,若a_act>a_min而且a_act<a_max,则表明条状物体(2)的倾斜角位于阈值范围内,表示检测通过,否则说明条状物体(2)的倾斜角过大,并向检测人员反馈。
技术总结
本发明属于公开了一种基于线束光的条状物体角度检测方法,包括下列步骤:第一步、设置检测区域,水平朝向所述条状物体的侧面投射线束光,采集包含线束光的条状物体图像;第二步、对采集的包含所述线束光的图像进行二值化处理;第三步、依据二值化后的图像拟合与线束光相关的两条直线;第四步、计算一条直线在输送带方向的透视角;第五步、拍摄正角度极限图像和负角度极限图像,检测确定所述透视角的角度阈值范围;第六步、实际检测,计算得到待测的条状物体的透视角角度,将其与透视角的角度阈值范围比较,判断检测的倾斜角是否通过。本发明对不同外表和大小的条状物体检测具有更好地适应性,检测更加简便,并具有良好的可靠性。
技术研发人员:王孝奇,龚周颖,夏璐
受保护的技术使用者:河南启迪睿视智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!